XiaoMi-AI文件搜索系统
World File Search System变带

基于波导 QED 的变分量子模拟器
在本补充材料中,我们提供了更多细节来支持正文中提出的结果。在 SM1 节中,我们回顾了当波导模式具有带隙时光子介导相互作用可调谐性的物理起源。然后,在 SM2 节中,我们总结了变分量子本征求解算法的关键步骤(SM2 A),描述了所考虑的目标模型的属性(SM2 B),解释了文献中通常使用的不同假设的结构(SM2 C),详细介绍了我们用于获得正文结果的优化协议(SM2 D),并评论了其他可能用于对我们的结果进行基准测试的品质因数(SM2 E)。最后,在 SM3 节中,我们讨论了用于获得正文图 3 的误差模型的细节。还请注意,用于重现手稿结果的所有代码都可以在 https://github.com/cristiantlopez/Variational-Waveguide-QED-Simulators 中找到。

二次量子变分蒙特卡罗
本文介绍了二次量子变分蒙特卡罗 (Q 2 VMC) 算法,这是量子化学中的一种创新算法,可显著提高求解薛定谔方程的效率和准确性。受虚时间薛定谔演化的离散化启发,Q 2 VMC 采用了一种新颖的二次更新机制,可与基于神经网络的假设无缝集成。我们进行了大量的实验,展示了 Q 2 VMC 的卓越性能,在跨各种分子系统的波函数优化中实现了更快的收敛速度和更低的基态能量,而无需额外的计算成本。这项研究不仅推动了计算量子化学领域的发展,还强调了离散化演化在变分量子算法中的重要作用,为未来的量子研究提供了一个可扩展且强大的框架。

变分预测编码下的目标导向行为
摘要 — 心理模拟是目标导向行为的关键认知功能,因为它对于评估行为及其后果至关重要。当给定一个自我生成或外部指定的目标时,通过心理模拟从其他候选中选择最有可能实现该目标的一系列动作。因此,更好的心理模拟会带来更好的目标导向行动计划。然而,开发心理模拟模型具有挑战性,因为它需要了解自我和环境。本文研究了如何通过动态组织自上而下的视觉注意力和视觉工作记忆来在心理上生成机器人的充分目标导向行动计划。为此,我们提出了一种基于变分贝叶斯预测编码的神经网络模型,其中目标导向行动计划由潜在意向空间的贝叶斯推理制定。我们的实验结果表明,出现了具有认知意义的能力,例如对机器人末端执行器(手)的自上而下的自主注意以及无遮挡视觉工作记忆的动态组织。此外,我们对比较实验的分析表明,引入视觉工作记忆和使用变分贝叶斯预测编码的推理机制显著提高了规划充分的目标导向行动的表现。

变分的安全云量子计算
变异量子算法(VQA)被认为是嘈杂的中间尺度量子(NISQ)设备的有用应用。通常,在VQA中,参数化的ANSATZ电路用于生成试验波函数,并且对参数进行了优化以最大程度地减少成本函数。另一方面,已经研究了盲量量计算(BQC),以便通过使用云网络为量子算法提供安全性。执行量子操作能力有限的客户端希望能够访问服务器的量子计算机,并且BQC允许客户端使用服务器的计算机,而不会泄漏客户端的信息(例如输入,运行量子算法和输出)到服务器。但是,BQC设计用于容差量子计算,这需要许多辅助量子位,这可能不适合NISQ设备。在这里,我们提出了一种有效的方法,可以为客户端提供保证安全性的NISQ计算。在我们的体系结构中,仅需要N +1量子位,假设服务器已知Ansatzes的形式,其中N表示原始NISQ算法中必要的量子数。客户端仅在从服务器发送的辅助量子位上执行单量测量,并且测量角可以指定NISQ算法的ANSATZES的参数。无信号原则可以保证客户端选择的参数或算法的输出都不会泄漏到服务器。这项工作为NISQ设备的新应用程序铺平了道路。
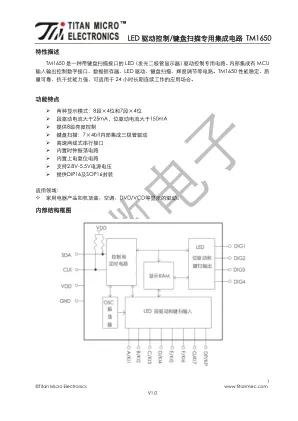
LED 驱动控制/键盘扫描专用集成电路TM1650
接口和TM1650 通信,在输入数据时当SCL 是高电平时,SDA 上的信号必须保持不变;只有SCL 上的 时钟信号为低电平时,SDA 上的信号才能改变。数据输入的开始条件是SCL 为高电平时,SDA 由高变
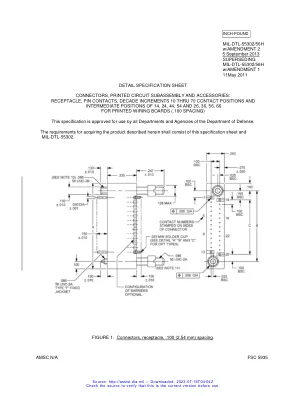
MIL-DTL-55302/56H 带修正案 2 - ASSIST-QuickSearch
注:1. 尺寸以英寸为单位。2. 公制等效值仅供参考。3. 除非另有规定,公差为 ± .005 (0.13 mm)。4. 这些连接器与 MIL-DTL-55302/55 中规定的连接器配接。5. 应在连接器的侧面标记表示每行中第一个和最后一个位置以及其间每四个触点位置的数字。作为上述选项的一种选择,可在连接器的侧面印上表示每四个腔体的数字,但必须标记第一个触点。6. 端接布局在 .025 (0.64 mm) 模块化网格上。7. 公制等效值在括号中。8. 保形涂层间隙最小应为 .005 (0.13 mm)(可选设计不作要求)。9. 可选设计保形涂层间隙。 10. 内螺纹导向件的孔深最小为 0.282 (7.16 毫米)。内螺纹件的全螺纹深度最小为 0.240 (6.1 毫米)。11. 附件安装件(螺母)为选配,可单独提供(见图 1)。
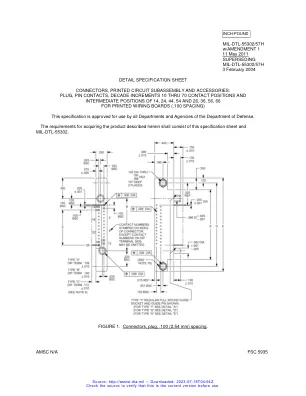
MIL-DTL-55302/57H 带修订 1 - ASSIST-QuickSearch
注意:1. 尺寸以英寸为单位。 2. 公制单位仅供参考。 3. 除非另有规定,公差为 ± .005 (0.13 mm)。 4. 这些连接器使用适当的硬件与 MIL-DTL-55302/62、MIL-DTL-55302/64、MIL-DTL-55302/65、MIL-DTL-55302/66 和 MIL-DTL-55302/58 中规定的连接器配接。 5. 应在连接器的侧面标记表示每行第一个和最后一个位置以及其间每四个触点位置的数字。作为上述选项之一,可在连接器的侧面标记表示每四个腔体的数字,但必须标记一号触点。 6. 端接布局在 .020 (0.51 mm) 模块化网格上。 7. 括号中为公制单位。8. 手柄形状可选。9. 可选底切最大 0.050 (1.27 毫米),位于 PCB 侧,用于清洁。10. 六角形方向的位置可选。六角形不得突破绝缘体侧面。11. 内孔导向硬件的孔深最小为 0.282 (7.16 毫米)。内螺纹硬件的全螺纹深度最小为 0.240 (6.1 毫米)。

重组带轮疫苗:系统评价
在Epistemoni KOS数据库中进行了搜索。该数据库定期通过多个来源的搜索进行更新,并已被验证为系统评价和随机对照试验(RCT)的全面来源。这些来源包括系统评价的COR CHANE数据库(CDSR),有效性评论摘要(DARE),PubMed,PubMed,Lilacs,Cinahl,Psycinfo,EM基础,EPPI中心证据库,系统评价和政策审查库Campbell Librals和JBI Datecation of Systematic Plectications and Immim Immim Immim Immim Imim Imim Immign。在PubMed数据库中对基本研究的识别进行了补充。所有搜索涵盖了数据库创建日期至01/04/2024的期间,没有出版日期,状态或语言的限制。搜索策略可在附录1中获得 - 补充材料的供应材料。
带相变热储存的热泵
免责声明:本文件是作为美国政府赞助的工作的帐户准备的。虽然该文件被认为包含正确的信息,但美国政府,其任何机构,加利福尼亚大学或其任何雇员的董事均未对任何信息,设备,产品或流程的准确性,完整性或有效性,都不会有任何法律责任,或者承担任何法律责任,这些责任是任何信息,设备,产品或流程所披露或代表其私人私有权利的使用权。以此处提到任何特定的商业产品,流程或服务的商标,商标,制造商或其他方式,并不一定构成或暗示其认可,推荐或受到美国政府或其任何机构或加州大学摄政的认可,建议或偏爱。本文所表达的作者的观点和意见不一定陈述或反映美国政府或其任何机构或加利福尼亚大学的董事会的观点和观点。

带回收塑料的包装食物
UST打开冰箱,您会发现塑料是我们带回家的食物的主要包装材料。混合沙拉,蘑菇,散布,鸡肉以及番茄酱,乳制品和软饮料:它们通常都用塑料包装。可乐和番茄酱存储在PET瓶中(聚对苯二甲酸酯),聚丙烯(PP)桶中的Yo-Ghurt,大型塑料牛奶瓶由高密度聚乙烯(HDPE)制成。然后是混合的塑料:Salami显示在由PET和聚乙烯(PE)制成的薄复合托盘上,并用由各种塑料层组成的纤维密封。和大多数瓶顶是由聚乙烯制成的。这种多样性使回收充满挑战。在理想的情况下,您可以按类型和颜色回收塑料,然后将其磨碎并洗涤以去除食物。最终,将这种再生塑料加工成制造商制造新瓶,托盘和箔的颗粒。,但是由于不良物质污染的风险,目前不允许使用大多数类型的丢弃塑料制作食物包装。只有通过沉积机分别收集的PET瓶才能为新瓶提供原材料。从一桶酸奶,牛奶瓶或冰淇淋桶中的塑料不回到厨房,而是在回收后作为油漆桶,花园椅子,洗发水瓶或垃圾袋,获得了新的生活。某些收集的塑料被焚化,因为它被污染了,无法回收,或者包含过多的不受欢迎的塑料 - 例如,构造废物或玩具。