XiaoMi-AI文件搜索系统
World File Search System可区分的
神经逻辑视觉语言解释器-Dr -ntu
摘要 - 如果我们比较了人类的理由和模型的深入原因,那么人类以象征性的方式与称为逻辑的正式语言进行理性,而大多数深层模型中的理由是黑框。一个自然的问题是“受过训练的深层模型是否与人类相似?”还是“我们可以用逻辑语言解释深层模型的推理吗?” 。在这项工作中,我们提出了Neurlogx,以解释逻辑语言中深视觉语言模型的推理过程。给定训练有素的视觉语言模型,我们的方法首先通过增加输入数据来生成推理事实。然后,我们开发一个可区分的归纳逻辑编程框架,以从事实中学习可解释的逻辑规则。我们在各种流行的视觉语言模型上显示了我们的结果。有趣的是,我们观察到几乎所有经过测试的模型都可以从逻辑上推理。

相同的量子粒子、纠缠和个性
摘要:经典物理学中的粒子是可区分的物体,可以根据其独特的物理性质单独挑选出来。相比之下,在物理哲学中,标准观点是同一类型的粒子(“相同粒子”)彼此完全无法区分,缺乏同一性。这种标准观点是有问题的:粒子不可区分性不仅与普通语言和经典物理理论中“粒子”的含义不相容,而且与该术语在当今物理学实践中的实际用法也不相容。此外,不可区分性理论阻碍了从量子粒子到我们通常在量子力学的经典极限中理解的“粒子”的平稳过渡。在阐述早期工作的基础上,我们在此分析了标准观点的前提,并讨论了避免这些问题和类似问题的替代方法。事实证明,这种替代方法与量子信息理论中的最新讨论有关。

陪审团suh
1。NOWISIS数据如何影响学习的接触动态?H.J.Terry Suh,M。Simchowitz,T。Pang,R。Tedrake IROS 2023研讨会:学习符合基于模型的操纵方法,并掌握2。与梯度打击不确定性:通过扩散得分与H.J.Terry Suh,G。Chou,H。Dai,L。Yang,A。Gupta,R。Tedrake机器人学习会议(CORL),2023 3.种子:6D中的串联弹性末期效果用于Visuotactile工具使用H.J.Terry Suh,N。Kuppuswamy,T。Pang,P。Mitiguy,A。Alspach,R。Tedrake国际智能机器人和系统会议(IROS),2022年,4。可区分的模拟器会提供更好的政策梯度吗?H.J.Terry Suh,M。Simchowitz,K。Zhang,R。Tedrake国际机器学习会议(ICML),2022年,Long Talk,杰出纸张奖5.在策略优化中使用可区分的模拟器进行访问量填充的操作H.J.Terry Suh,M。Simchowitz,K。Zhang,T。Pang,R。Tedrake ICRA 2022车间:RL操纵6。线性模型在对象桩操纵中的线性模型的令人惊讶的有效性H.J.Terry Suh,R。Tedrake算法XIV(WAFR),347-363,2020 7。多模式混合运动H.J.Terry Suh,X。Xiong,A。Singletary,A.D。Ames,J.W。 Burdick IEEE国际智能机器人与系统会议(IROS),2020 8。 朝着面向人形的运动写作A. Stoica,H.J。 Terry Suh,S.M。Terry Suh,X。Xiong,A。Singletary,A.D。Ames,J.W。Burdick IEEE国际智能机器人与系统会议(IROS),2020 8。朝着面向人形的运动写作A. Stoica,H.J。Terry Suh,S.M。Terry Suh,S.M。Hewitt,S。Bechtle,A。Gruebler,Y。IwashitaIEEE国际系统,人与控制论的国际会议(SMC),2017年
大脑爆炸
本月,在 NSCI 201 中,我们进行了两次讲座,一次是关于运动和运动障碍,另一次是关于睡眠和昼夜节律。在我们的第一次讲座中,Soma 博士邀请了客座演讲者 Silke Cresswell 博士来讲述帕金森病的临床方面,以所学的运动机制为基础。我们仔细研究了运动皮质的划分、乙酰胆碱信号以及皮质脊髓束的外侧和内侧。在第二堂课中,我们回顾了过去对蟋蟀的一些研究,这些研究为“我们有一个内部时钟或昼夜节律”这一观点提供了证据。然后,我们讨论了睡眠的不同阶段,以及它们产生的不同脑电图可区分的脑电波。在我们的辅导课上,每个学生都挑选了一篇来自 UBC 行为神经科学研究人员的论文,随后将展示适合普通观众的信息图。

使用局部拓扑特征增强图表学习
在图表上的表示是一个基本问题,在各种任务中可能至关重要。图形神经网络是图表学习的主要方法,其表示能力有限。因此,将高阶拓扑和几何信息明确提取并纳入这些模型可能是有益的。在本文中,我们提出了一种原则性的方法,以根据持续同源性理论提取图形的丰富连通性信息。我们的方法利用拓扑特征来增强图形神经网络的表示学习,并在各种节点分类和链接预测基准上实现最先进的性能。我们还探索了拓扑特征的端到端学习的选择,即将拓扑计算视为学习过程中可区分的操作员。我们的理论分析和实证研究为在图形学习任务中采用拓扑特征提供了见解和潜在指南。关键字:持续的同源性,拓扑数据分析,图形神经网络,图表学习,图形同构

DIF
我们提出了直接的奖励微调(草稿),这是一种简单有效的方法,用于调整扩散模型,以最大程度地提高可区分的奖励功能,例如人类偏好模型的分数。我们首先表明,可以通过完整的抽样程序将奖励函数梯度进行后退,并且这样做可以在各种奖励上实现强劲的绩效,超过了基于强化学习的方法。然后,我们提出了草稿:草稿K的更多有效变体,该变体仅将反向传播截断为采样的最后K步骤,而Draft-LV则获得了k = 1时的较低差异梯度估计。我们表明,我们的方法在各种奖励功能上都很好地工作,可以用来实质上提高稳定扩散1.4产生的图像的美学质量。最后,我们在方法和先前的工作之间建立了联系,从而提供了基于基于梯度的细胞调整算法的设计空间的统一观点。

随机状态和黑洞的相对熵
我们研究高度激发量子态的相对熵。首先,我们从 Wishart 集合中抽取状态,并开发出一种大 N 图解技术来计算相对熵。该解决方案以基本函数的形式精确表示。我们将分析结果与小 N 数值进行比较,发现它们完全一致。此外,随机矩阵理论结果与混沌多体本征态的行为精确匹配,这是本征态热化的表现。我们将这种形式应用于 AdS = CFT 对应,其中相对熵测量不同黑洞微态之间的可区分性。我们发现,即使观察者对量子态的访问量任意小,黑洞微态也是可区分的,尽管这种可区分性在牛顿常数中非微扰地小。最后,我们在子系统本征态热化假设 (SETH) 的背景下解释这些结果,得出结论,全息系统服从 SETH,直到子系统达到整个系统的一半大小。
使用光子
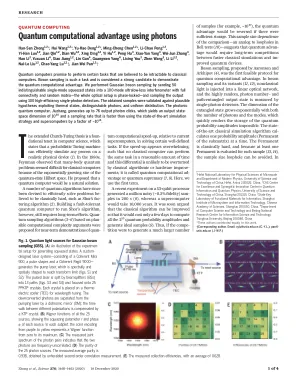
量子计算机承诺执行某些被认为对古典计算机棘手的任务。玻色子采样是这样的任务,被认为是证明量子计算优势的有力候选者。我们通过将50个不可区分的单模单模状态发送到具有完整连接性和随机矩阵的100模式超级失误干涉仪中,通过将50个不可区分的单模单模式挤压状态发送到了高斯玻色子采样 - 整个光学设置是相锁的 - 并使用100个高效的单光子检测器对输出进行采样。针对利用热状态,可区分的光子和均匀分布的合理假设验证了所获得的样品。光子量子计算机Jiuzhang最多生成76个输出光子点击,该光子可产生10 30的输出状态空间尺寸,而采样速率比使用最先进的仿真策略和超级计算机的采样率更快。t

dr-robot.pdf
摘要:接受大量视觉数据训练的视觉基础模型已显示出空前的推理和计划技能。将它们应用于机器人任务的关键挑战是视觉数据和动作数据之间的方式差距。我们引入了可区分的机器人渲染,这是一种方法,允许机器人体的视觉外观相对于其控制参数直接差异。我们的模型整合了运动学意识的模型和高斯人的裂开,并与任何机器人形式和自由度兼容。我们证明了它在范围中的功能和用法,包括重建了来自图像的机器人姿势和通过视觉语言模型控制机器人。定量和定性结果表明,我们可直接从像素的机器人控制提供了有效的机器人控制梯度,为Vision Foundity模型在机器人技术中的未来应用奠定了基础。交互式演示和其他可视化措施可在以下网址提供:drrobot.cs.columbia.edu/。

交换耦合介观介观连接钒基-...
摘要:充当潜在量子门的分子多自旋系统需要微调磁相互作用以实现单自旋可寻址性和自旋量子比特的纠缠。我们在此报告一种新的单链钒基-卟啉二聚体的合成,该二聚体结晶为两种不同的伪多晶型。单晶连续波电子顺磁共振研究表明,两个倾斜且可区分的自旋中心之间存在微小但至关重要的各向同性交换相互作用 J ,其数量级为 10 -2 cm -1 。实验和 DFT 研究表明 J 值与卟啉平面倾斜角和扭曲度之间存在相关性。脉冲 EPR 分析表明,两个钒基二聚体保持了单体的相干时间。我们的结果,加上卟啉系统的蒸发性,表明这类二聚体在量子信息处理应用中极具前景。