XiaoMi-AI文件搜索系统
World File Search System台面
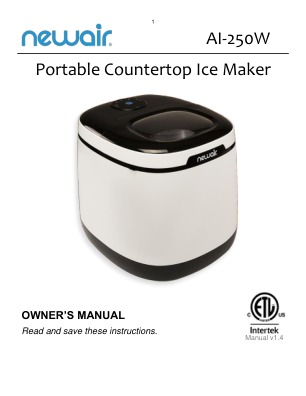
便携式台面制冰机 AI-250W
在线注册您的产品……………………………………………………………………………………………………4 重要安全信息 ...................................................................................................................... 5 了解您的制冰机 ...................................................................................................................... 7 操作程序和维护 ...................................................................................................................... 8 维护和清洁 ...................................................................................................................... 10 故障排除 ...................................................................................................................... 11 有限制造商保修 ............................................................................................................. 12

染料的完全添加性制造的台面...
摘要:在染料敏化的太阳能电池(DSSC)中,反电极(CE)作为电子传递剂和氧化还原夫妇的再生剂起着至关重要的作用。与通常由玻璃基底物(例如FTO/玻璃)制成的常规CE,聚合物底物似乎是新兴的候选物,这是由于它们的内在特性轻巧,高耐用性和低成本。尽管有很大的希望,但当前的CES在聚合物基板上的制造方法遭受了严重的局限性,包括低电导率,可伸缩性,过程复杂性以及对专用真空设备的需求。在本研究中,我们采用并评估了一条完全的加性制造路线,该路线可以以高通量和环保的方式为DSSC制造CE,并提高性能。提出的方法顺序包括:(1)材料挤出3-D打印聚合物底物; (2)通过冷喷雾颗粒沉积的导电表面金属化; (3)用石墨铅笔过度涂层薄层催化剂。制造的电极的特征是微结构,电导率和光转换效率。由于其有前途的电导率(8.5×10 4 S·M-1)和微区岩石表面结构(rA≈6.32µm),与由FTO/Glass制成的传统C相比,具有添加性生产的CES的DSSC导致了繁殖的CES,导致了约2.5倍的光率效率。研究结果表明,提出的添加剂制造方法可以通过解决常规CE制造平台的局限性来推动DSSC的领域。

by-slam:基于台面和语义信息提取的动态视觉大满贯系统
摘要:SLAM是一种至关重要的技术,用于实现无人车辆的自主导航和定位。传统的视觉同时本地化和映射算法建立在静态场景的假设上,从而忽略了动态目标在现实世界环境中的影响。来自动态目标的干扰可以显着降低系统的定位精度,甚至导致跟踪故障。为了解决这些问题,我们提出了一个名为S-Slam的动态视觉大满贯系统,该系统基于“同样和语义信息提取”。最初,引入了词汇描述符来描述定向的快速特征点,从而提高了特征点匹配的精度和速度。随后,fasternet替换了Yolov8的骨干网络以加快语义信息提取。通过使用DBSCAN聚类对象检测的结果,获得了更精致的语义掩码。最后,通过利用语义面膜和表现约束,可以辨别和消除动态特征点,从而仅利用仅利用静态特征点进行姿势估计,并构建了不包括动态目标的密集3D地图。在TUM RGB-D数据集和现实世界情景上进行了实验评估,并证明了拟议算法在滤除场景中的动态目标方面的有效性。与Orb-Slam3相比,TUM RGB-D数据集的本地化准确性提高了95.53%。针对经典动态大满贯系统的比较分析进一步证实了通过lam的定位准确性,地图可读性和鲁棒性的提高。

6 CCR 1007-1 第 06 部分 - 科罗拉多州法规
“X 射线台”是指在射线照相和/或台面荧光透视期间,患者支撑结构(台面)介于患者和图像接收器之间的患者支撑装置。这包括但不限于任何配有射线可透面板的担架和任何配有盒式托盘(或滤光片)、盒式隧道、荧光透视图像接收器或台面下方点片装置的桌子。

利用双台面结构电容电压测量确定 II 型超晶格中的背景掺杂类型
我们提出了一种确定半导体背景掺杂类型的方法,即在过度蚀刻的双台面 pin 或 nip 结构上使用电容电压测量。与霍尔测量不同,此方法不受基板电导率的限制。通过测量具有不同顶部和底部台面尺寸的器件的电容,我们能够最终确定哪个台面包含 pn 结,从而揭示本征层的极性。当在 GaSb pin 和 nip 结构上演示时,此方法确定该材料是残留掺杂的 p 型,这已由其他来源充分证实。然后将该方法应用于 10 单层 InAs/10 单层 A1Sb 超晶格,其掺杂极性未知,并表明该材料也是 p 型。

单组分等离子体在光电探测器阵列周期性结构的 ICP-RIE 蚀刻工艺中的应用
红外 (IR) 探测技术的发展主要依赖于 InAs/GaSb SL 外延 [1] 和生长后处理 [2] 的改进。为了实现最佳性能,必须优化器件架构 [3] 以及台面结构,使其侧壁垂直且光滑,以防止像素间距较小的焦平面阵列 (FPA) 中的串扰,其中周长与表面积的纵横比很高 [2, 4]。表面台面的粗糙度、反应产物的存在以及电活性缺陷的表面密度(包括断裂的化学键)都会影响表面漏电流的大小 [5]。台面型结构可以通过湿法或干法蚀刻来创建。先前的研究表明,无机和有机酸性蚀刻剂都适用于 InAs/GaSb 超晶格 (SL) 的湿法蚀刻 [5, 6]。湿法蚀刻有许多优点,例如断裂的化学键数量少、自由载流子密度降低,因此漏电流低 [6, 7]。然而,也会产生不良反应产物并残留在侧壁表面上,导致漏电流的显著增加。湿法蚀刻也是各向异性的,导致台面侧壁几何形状不理想 [8]。另一方面,InAs 和 GaSb 材料的干法蚀刻经常使用气态氯与惰性气体(如氩气)的组合 [9, 10]。气态氯因其高挥发性和高蚀刻速率而受到青睐,而氩离子通过轰击蚀刻表面简化了反应产物的解吸。BCl 3 蚀刻具有较低的蚀刻速率,但使用它会产生更光滑的台面侧壁 [11]。BCl 3 /Ar 等离子体的使用已被证明在分立探测器中是有效的。尽管如此,当用于台面时,它表现出次优性能

deLegation_of_power_for_appro ...
1。在适当的政府事先批准的情况下,应根据第(2)款的规定安装或安装在地面上方。2。第(1)款中包含的规定不得适用。与具有不超过11千瓦的名义电压且打算用于向单个消费者供应的电压的电线相关; b。在负责安装的人的职业或控制中,在占用或控制的场所内,这么多的电线;或c。在其他情况下,可能是规定的。3。适当的政府应在根据第(1)款授予批准的同时,强加必要的条件(包括有关行的所有权和行动的条件)。4。适当的政府可以在其批准批准中规定的期限结束后的任何时候改变或撤销批准。5。在 在靠近头顶上的任何树木或躺在任何结构或其他物体附近或落在架设上的台面或落在台面附近,在放置此类行,中断或干扰或干扰或干扰或干扰或干扰或干扰的情况下,可能会或其他行动的范围或在适当的范围内,可能会置换或在范围内供应,或者在适当的范围内,可能会置于运输或传播或造成任何行动,或者在适当的范围内,可能会在适当的范围内进行置换,因为该行政法官或范围可能会在适当的范围内置于范围内,因为该行政法官或范围可能会在适当的范围内转移或造成的范围,因为该行政法官或范围可能会置于适当的法官或权限。按照他或它认为合适的方式处理。 6。在靠近头顶上的任何树木或躺在任何结构或其他物体附近或落在架设上的台面或落在台面附近,在放置此类行,中断或干扰或干扰或干扰或干扰或干扰或干扰的情况下,可能会或其他行动的范围或在适当的范围内,可能会置换或在范围内供应,或者在适当的范围内,可能会置于运输或传播或造成任何行动,或者在适当的范围内,可能会在适当的范围内进行置换,因为该行政法官或范围可能会在适当的范围内置于范围内,因为该行政法官或范围可能会在适当的范围内转移或造成的范围,因为该行政法官或范围可能会置于适当的法官或权限。按照他或它认为合适的方式处理。 6。在靠近头顶上的任何树木或躺在任何结构或其他物体附近或落在架设上的台面或落在台面附近,在放置此类行,中断或干扰或干扰或干扰或干扰或干扰或干扰的情况下,可能会或其他行动的范围或在适当的范围内,可能会置换或在范围内供应,或者在适当的范围内,可能会置于运输或传播或造成任何行动,或者在适当的范围内,可能会在适当的范围内进行置换,因为该行政法官或范围可能会在适当的范围内置于范围内,因为该行政法官或范围可能会在适当的范围内转移或造成的范围,因为该行政法官或范围可能会置于适当的法官或权限。按照他或它认为合适的方式处理。 6。在靠近头顶上的任何树木或躺在任何结构或其他物体附近或落在架设上的台面或落在台面附近,在放置此类行,中断或干扰或干扰或干扰或干扰或干扰或干扰的情况下,可能会或其他行动的范围或在适当的范围内,可能会置换或在范围内供应,或者在适当的范围内,可能会置于运输或传播或造成任何行动,或者在适当的范围内,可能会在适当的范围内进行置换,因为该行政法官或范围可能会在适当的范围内置于范围内,因为该行政法官或范围可能会在适当的范围内转移或造成的范围,因为该行政法官或范围可能会置于适当的法官或权限。按照他或它认为合适的方式处理。 6。在靠近头顶上的任何树木或躺在任何结构或其他物体附近或落在架设上的台面或落在台面附近,在放置此类行,中断或干扰或干扰或干扰或干扰或干扰或干扰的情况下,可能会或其他行动的范围或在适当的范围内,可能会置换或在范围内供应,或者在适当的范围内,可能会置于运输或传播或造成任何行动,或者在适当的范围内,可能会在适当的范围内进行置换,因为该行政法官或范围可能会在适当的范围内置于范围内,因为该行政法官或范围可能会在适当的范围内转移或造成的范围,因为该行政法官或范围可能会置于适当的法官或权限。按照他或它认为合适的方式处理。6。在处置第(5)款的申请时,如果在放置高架线之前存在的任何树木,则根据该小节规定的执行治安法官或权威,应授予对树木感兴趣的人,因为他认为合理的薪酬,该人可能会从被许可人那里恢复过来。