XiaoMi-AI文件搜索系统
World File Search System器人
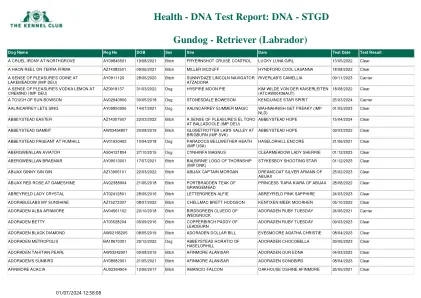
检索器(拉布拉多) - DNA测试报告
Allabs Lincolnshire Lass在Technicoat AX139501 18/03/2020 Bitch Technicoat Subur和Labil Party Party Party of Arihzans的时间20/09/2022 Clear

dts0095-梁拆分器/组合器
光纤束拆分器用于将光从一个纤维分为两个或更多纤维。首先将输入纤维的光准直接发送,然后通过光束分裂的视频发送将其分为两部分。然后将结果输出梁聚焦到输出纤维中。1xn和2xn拆分器都可以以这种方式构建多达八个或以上的输出,而低回报损失和低插入损失。此设计非常灵活,使人们可以在不同端口上使用不同的纤维类型,并在内部使用不同的梁分离器光学器件。常规制造的定制设计结合了循环器,两极分化的溅射器和非极化拆分器。可以用永久连接到每个端口(辫子样式)的纤维或每个端口上的插座制成拆分器。我们还可以用Bui lt-In beamsplitters为激光或激光二极管源构建源源。有关详细信息,请联系Oz。

水母搜索优化器的应用
摘要:气候环境的变化以及间歇性对可再生能源(RESS)的总体能源系统产生显着影响,需要制定控制策略以提取Ress可用的最大功率。为了完成这项任务,已经开发了几种技术。应使用有效的最大功率跟踪(MPPT)技术来确保风发和PV生成系统都提供其全部优势。在本文中,开发了一种新的MPPT方法(JSO);此外,利用统一的功率质量调节剂(UPQC)来增强微电网(MG)的性能并解决敏感负载的功率质量问题。MG检查了光伏(PV),风力涡轮机和燃料电池电池,并以均匀和非均匀的风速和太阳辐照度进行了检查。提出了开发算法与不同最大功率跟踪算法之间的比较。此外,进行了四个案例研究,以验证引入的UPQC在增强功率质量问题方面的有效性。使用其他算法评估时,研究结果表明,发达算法的高性能。MATLAB/SIMULINK软件用于仿真风,PV和FC控制系统。然而,在与PV辐照的相同条件下进行了实验有效测试,以验证模拟结果。实验验证是通过使用PV模块模型,带有太阳高度模拟器CO3208-1B板的三倍,23 v/2a CO3208-1A执行的,并将结果与仿真结果进行比较。
LifePower4 48V自动更新器指南
请注意!实际产品可能会有所不同,但是产品的功能将保持不变。使用此设备使最终用户可以在其EG4 LifePower4 48V电池上轻松执行公司软件更新。通过利用此设备并遵循下面列出的步骤,最终用户将能够轻松执行电池公司的更新。尝试执行更新之前,请彻底阅读指南,并且一次仅对一个电池执行更新。
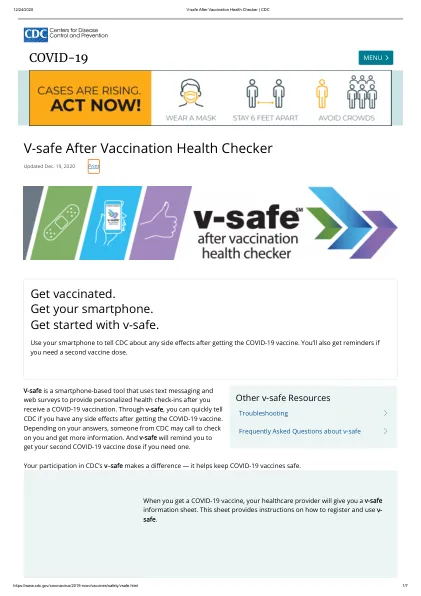
v-SAFE疫苗接种后健康检查器
V-SAFE是一种基于智能手机的工具,它使用文本消息传递和Web调查在接到COVID-19疫苗接种后提供个性化的健康检查。通过V-SAFE,您可以快速告诉CDC是否在获得Covid-19疫苗后是否有任何侧面E×ECT。根据您的答案,CDC的某人可能会打电话检查您并获取更多信息。和V-SAFE将提醒您如果需要的话,请提醒您获得第二个Covid-19疫苗剂量。

设置和使用Aurora®撤离器 + ...
禁忌症•在外科医生认为与去除组织相关的并发症风险增加的患者中不要使用。•不要用来去除固体组织,因为这可能会导致设备故障。•不要用来去除癌组织,因为这可能导致患者并发症。•当您无法可视化要撤离的材料时,请勿使用抽吸。•不要用于去除含有可疑肌瘤的子宫组织:绝经后或绝经后或候选者,例如通过阴道或通过迷你型单调切开术。•请勿在妇科手术中使用,其中已知或怀疑要去除的组织含有恶性肿瘤。•不要用于输卵管组织的避孕凝结。
数据收集器|转录器|翻译
•将访谈从源头转化为目标语言; •通过缩写名称替换名称(每个名称的首字母),并使用一个名称用于参考以前提到的名称以保持一致性的人来匿名化翻译文档; •澄清否则将保持模棱两可或脱皮的术语和概念; •对语言进行概念化,以避免误解,误解和丧失预期含义; •与高级野外主管沟通任何可能导致未达到指定截止日期的问题; •以专业和诚实的方式行事,并为团队成员举例举例; •协助与手头项目交付有关的任何其他任务。

MIP求解器中的机器学习
Khalil等。 学习在Tree Search 2017 Hutter等人中学习启发式方法。 算法运行时预测:方法与评估2012 Hutter等。 混合整数编程求解器的自动配置2010 Ferber等。 mipaal:混合整数程序作为2019年层Wilder等人。 最终学习和优化图表2019Khalil等。学习在Tree Search 2017 Hutter等人中学习启发式方法。算法运行时预测:方法与评估2012 Hutter等。混合整数编程求解器的自动配置2010 Ferber等。mipaal:混合整数程序作为2019年层Wilder等人。最终学习和优化图表2019
映射和对象的自主漫游器...
在这个综合项目中,我们旨在增强建立在4轮底盘上的避难系统,利用Arduino,Raspberry Pi 3B,Tensorflow Lite和RP Lidar A1的组合。这些组件的集成创建了一个精致的机器人系统,能够智能决策,对象检测和连续的两维映射。使用伺服电动机的超声传感器进行了伺服电机的超声传感器,以实时检测机器人路径中的障碍物,这是基本的避免系统的基础避免系统。这个简单且具有成本效益的解决方案提供了导航的初始层,从而通过避免碰撞来确保机器人可以在动态环境中操纵。为了提升系统的功能,我们引入了Raspberry Pi 3B,作为操作的大脑。连接到USB摄像机,Raspberry Pi利用Python中的Tensorflow Lite库进行对象检测和识别。此添加使机器人能够在其周围环境中识别和分类对象,从而增强其根据视觉输入做出明智决策的能力。目标:

端到端加密健身追踪器
在设计速度的安全体系结构时,我们认为公共云是不安全的,无法存储个人未加密的数据。虽然我们遵循最佳实践来确保基础架构,但我们也认为它容易受到恶意入侵的影响。步调的安全模型依赖于椭圆曲线密码学。所有数据都在用户的设备上加密,并且从未通过网络未加密发送。为了实现这一目标,每个用户都有一个唯一的密钥对来加密和一个唯一的密钥对,用于签名数据。这些钥匙对是在创建帐户期间生成的,除所有者以外,其他任何人都不知道私钥。它可以确保没有人,甚至没有步调,可以读取用户的数据,除了最终可以决定与之共享的其他用户。,如果入侵者获得了对基础架构的恶意访问,它还可以防止妥协和数据泄漏。使用以下库使用NACL实现加密: