XiaoMi-AI文件搜索系统
World File Search System器人

铁电体通用热力学求解器
− − 是一个基于 Landau-Ginzburg-Devonshire (LGD) 理论计算铁电单晶和薄膜热力学单畴平衡态及其特性的程序。利用 SymPy 库的符号操作,可以求解控制方程以及适当的边界条件,从而快速最小化晶体的自由能。利用流行的差分进化算法,通过适当的混合,可以轻松生成多个相图,例如块体单晶的压力-温度相图和单畴薄膜系统的常见应变-温度相图。此外,可以同时计算稳定铁电相的多种材料特性,包括介电、压电和电热特性。对薄膜和单晶系统进行了验证研究,以测试开源程序的有效性和能力。

通用数据加载器 (cdl) - L3Harris
L3Harris CDL 是一种坚固耐用的存储系统,专为军事和商业航空应用而设计。线路可更换单元 (LRU) 是一种网络附加存储 (NAS) 设备,可为网络上的其他设备提供高速基于文件的数据存储服务,具有优化的尺寸、重量、功率和冷却 (SWaP-C) 配置。
技术手册:Outlet Works 能量消散器
封面上。— 维加水坝于 1959 年建成,位于科罗拉多州西部。这座堤坝高 162 英尺。低位出水口工程的水通过一个带拦污栅的进水口结构进入一个直径为 5 英尺的垂直混凝土管道。管道通过一个圆形曲线从垂直过渡到水平。管道继续向下游流动,过渡到混凝土闸门室内的 3.5 英尺见方的钢制管道,其中 3.5 英尺见方的高压应急闸门控制管道内的流量。钢制管道过渡到 8 英尺高的混凝土马蹄形管道内的 51 英寸直径钢制压力管,并继续向下游流动。在下游端附近,管道分为两个直径为 36 英寸的混凝土封闭管道,进入调节结构。每条直径为 36 英寸的管道与水平面呈约 32 度倾斜,由一个 2.25 平方英尺的高压调节闸门控制。管道中的水流排入 87.4 英尺长的静水池,然后进入运河。两条管道的总排水量约为 488 立方英尺/秒。

使用GAN歧视器检测...
印度摘要 - 随着数字内容产生的增加,深层假图像已成为日益关注的问题,对隐私,安全性和信誉构成威胁。本文介绍了基于生成对抗网络(GAN)的深假伪造图检测工具的研究,该工具的目的是将真实图像与合成生成的图像区分开。通过利用深度学习,特别是GAN框架的歧视者,该系统确定了深层假图像中的不一致之处,为在媒体验证,网络安全和法律应用等各个领域提供可靠的检测提供了可靠的检测。我们的系统采用了发电机 - 歧视器架构,在该架构中训练了鉴别器以识别发电机生成的假图像,从而提高了其发现深色伪造的Telltale迹象的能力。在真实图像和虚假图像的广泛数据集上进行了培训,该模型能够学习细微的差异并准确地标记合成内容。该工具的目标是增强操纵图像的检测,这是需要图像真实性验证的帮助扇区。关键字 - 深处伪造,深伪,对抗网络,机器学习,生成对抗网络(GAN)

432自动外部除颤器
A medical heart monitor and defibrillator device that: Has been cleared for market by the federal Food and Drug Administration, Can recognize the presence or absence of ventricular fibrillation or rapid ventricular tachycardia, Can determine, without intervention by an operator, whether defibrillation should be performed, and On determining that defibrillation should be performed, automatically charges and requests delivery of an electrical impulse to an个人的心脏和:(1)需要操作员干预才能提供电脉冲;或(2)随着电脉冲的传递,会自动继续。(马里兰州法规(COMAR)§30.01.01.02)心肺复苏(CPR):
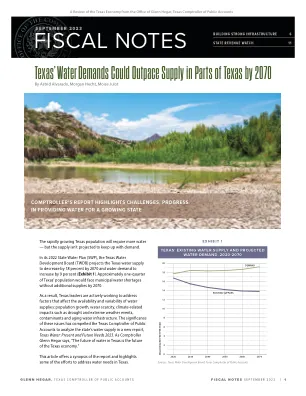
财政笔记-Texas审计器
2023年第88届德克萨斯州立法机关通过参议院第28号法案。该法案的通过是为了支持TWDB提供的财政援助以及该机构为供水项目提供资金的计划,以为国家创造新的水源,包括淡化项目,生产的水处理项目,含水层存储和恢复项目,以及开发基础设施以运输新的水源项目可用的水。德克萨斯州选民将有机会权衡拟议的宪法修正案,以建立德克萨斯水基金,以帮助该州的水项目为资金提供资金。只有在拟议的宪法修正案(第6号提议)在11月获得德克萨斯州选民批准的情况下才能建立该基金。fn

工作包 3.2:汇总器报告
第三方聚合商参与该项目将测试在多方和聚合模型之间聚合和协调 DER 的能力,并将提供宝贵的经验教训,说明如何根据需要促进西澳大利亚新兴的协调和聚合生态系统的发展。第三方聚合商也有望将自己的客户带入该项目(同时与 Project Symphony 下开发的聚合商平台集成),这将扩大各种 DER 类型的客户获取。虽然所有住宅客户和许多商业客户都将是 Synergy 客户,但第三方聚合商可能与客户存在现有关系或未来关系,这些关系与 Synergy 与该客户的关系无关。
DCIA解旋酶加载器与DNA
在充电/放电过程中锂电池电极的结构和电子演化的研究对于了解LI的存储/释放机制至关重要,并优化了这些材料,以实现高性能和循环性。在过去的20年中,在过去的20年中,已经开发出了几种原位和现代技术,例如X射线衍射XRD,1-11 X射线吸收光谱XAS XAS,12-15和Mössbauer,Mössbauer,16 Raman,ir和NMR 17,18 Specopies已开发出来。对电池材料的原位评估,即在封闭的电化学电池内观察,带来在线信息,并消除了通过环境气氛操纵高反应性粉末的风险。它允许研究复杂的反应机制,并证明由于电极s内的结构和电子过渡而导致的各种化学系统中的电压 - 组合物非常令人满意。可以在标准实验室衍射仪和同步加速器源设备中进行原位XRD研究,该设施可提供比常规X射线管所输送的光子量高几个数量级的X射线光束。到此为止,已经设计了几种用于转移或传输几何形状的电化学细胞。在标准X射线衍射仪中,高质量位置敏感探测器的最新开发使得在实验室中更容易使用此类技术。使用带状结构计算和数据模拟的最新方法在允许对电化学锂插入/提取过程中的化学键进行精确分析方面非常成功。在要研究的材料方面非常普遍,最近在伸展的X射线吸收膜结构Exafs和X射线吸收接近边缘结构Xanes Xanes Xanes模式中,最近在延伸的X射线吸收膜结构中广泛执行了原位XAS的结构变化和电子传递现象。例如,尽管信号的EXAFS部分提供了有关其自身吸收原子选择的近距离环境的直接结构信息,但可以将光谱的XANES部分大致看作是给定原子的空电子状态的图片,并允许在静脉内和反流中监测这些水平的收费过程。19此外,同步设施中弯曲的单晶的开发和使用分散X射线吸收结构以及单色QuickXAS快速旋转的可能性为研究的新方法铺平了道路,以研究对电池材料的研究。使用非常短的收购时间的可能性,通常是XRD和XAS几秒钟的顺序,确实允许我们投资 -