XiaoMi-AI文件搜索系统
World File Search System回波
双线雷达液位变送器 - Serv'Instrumentation
Rosemount 5400 系列是脉冲式 2 线非接触式雷达液位变送器,旨在提高过程工厂的盈利能力。它采用 Radar Echonomics™ 概念,通过最佳处理雷达信号以确保可靠的测量,为您的工厂增加价值。Radar Echonomics™ 结合了三个基本领域的卓越性能:Echosensitivity™ - 在嘈杂信号环境中检测弱雷达回波的技能,Echodynamics™ - 同时处理弱和强雷达回波的技能,以及 Echologics™ - 区分真实回波和虚假回波的智能。这些技能以及创新使用它们的能力基于多年的专业知识和经验。

第 101 页第 3.3 节查看几何和空间......
该图说明了如何实现这一点。当目标 (A) 首次进入雷达波束 (1) 时,开始记录每个发射脉冲的反向散射回波。随着平台继续向前移动,在目标处于波束内的整个时间内,记录每个脉冲的目标回波。一段时间后,目标离开雷达波束视野 (2) 的点决定了模拟或合成天线 (B) 的长度。远距离目标的波束最宽,照射时间会比近距离物体更长。随着地面距离的增加,波束宽度的扩大,加上目标在波束内的时间增加,相互平衡,从而使整个扫描带的分辨率保持不变。这种在整个成像扫描带上实现均匀、精细的方位角分辨率的方法称为合成孔径

用于物体识别的直升机机载水声装置的视觉表现形式
在主动模式下,改进包括引入啁啾探测脉冲和匹配接收。通过降低表面混响水平,声纳的探测范围可以显著增加。显示使用真实全景图,带有彩色目标强度展示和回波包络(A 型显示)和电子放大镜(缩放功能)。通过引入与提供导航数据和传输目标信息的机载指挥系统的通信,两个系统都可以自动直观地表示当前的战术情况,即检测到的物体的移动。图 5 给出了显示的示例以及它如何表示目标的路线。这大大加快并改善了直升机与船舶和直升机与直升机之间的通信过程。
第 101 页第 3.3 节查看几何和空间......
该图说明了如何实现这一点。当目标 (A) 首次进入雷达波束 (1) 时,开始记录每个发射脉冲的反向散射回波。随着平台继续向前移动,在目标处于波束内的整个时间内,记录每个脉冲的目标回波。一段时间后,目标离开雷达波束视野 (2) 的点决定了模拟或合成天线 (B) 的长度。远距离目标的波束最宽,照射时间会比近距离物体更长。随着地面距离的增加,波束宽度的扩大,加上目标在波束内的时间增加,相互平衡,从而使整个扫描带的分辨率保持不变。这种在整个成像扫描带上实现均匀、精细的方位角分辨率的方法称为合成孔径
第 101 页 第 3.3 节 查看几何和空间...
此图说明了如何实现这一点。当目标 (A) 首次进入雷达波束 (1) 时,开始记录每个发射脉冲的反向散射回波。随着平台继续向前移动,在目标处于波束内的整个时间内,记录每个脉冲的目标回波。一段时间后,目标离开雷达波束视野 (2) 的点决定了模拟或合成天线 (B) 的长度。远距离目标的波束最宽,照射时间会比近距离物体更长。波束宽度的扩大,加上地面距离增加时目标在波束内的时间增加,相互平衡,使得整个扫描带的分辨率保持不变。这种在整个成像带上实现均匀、精细方位角分辨率的方法称为合成孔径
第 101 页第 3.3 节查看几何和空间......
该图说明了如何实现这一点。当目标 (A) 首次进入雷达波束 (1) 时,开始记录每个发射脉冲的反向散射回波。随着平台继续向前移动,在目标处于波束内的整个时间内,记录每个脉冲的目标回波。一段时间后,目标离开雷达波束视野 (2) 的点决定了模拟或合成天线 (B) 的长度。远距离目标的波束最宽,照射时间会比近距离物体更长。随着地面距离的增加,波束宽度的扩大,加上目标在波束内的时间增加,相互平衡,从而使整个扫描带的分辨率保持不变。这种在整个成像扫描带上实现均匀、精细的方位角分辨率的方法称为合成孔径
第 101 页第 3.3 节查看几何和空间......
该图说明了如何实现这一点。当目标 (A) 首次进入雷达波束 (1) 时,开始记录每个发射脉冲的反向散射回波。随着平台继续向前移动,在目标处于波束内的整个时间内,记录每个脉冲的目标回波。一段时间后,目标离开雷达波束视野 (2) 的点决定了模拟或合成天线 (B) 的长度。远距离目标的波束最宽,照射时间会比近距离物体更长。随着地面距离的增加,波束宽度的扩大,加上目标在波束内的时间增加,相互平衡,从而使整个扫描带的分辨率保持不变。这种在整个成像扫描带上实现均匀、精细的方位角分辨率的方法称为合成孔径

病史患者:儿童和青少年偶然发现的丘脑病变的影像学特征和自然脑 MRI
缩写:AP = 前后位;EMR = 电子病历;GRE = 梯度回忆回波;PD = 质子密度;TR = 横向 随着 MRI 成像利用率的提高和技术的进步,在用于临床和研究目的的儿科脑 MRI 成像检查中经常会发现偶然发现(可能与临床表现无关的意外成像发现)。1 - 5 在我们的儿科神经放射学实践中,我们经常在因各种适应症进行的脑部检查中发现丘脑内的非特异性病变。虽然其中一些偶然发现可能具有直接的临床意义,但大多数意义尚不明确,可能会引起临床医生的困惑以及患者及其家属的担忧。6 此外,对这些发现的后续评估可能会导致一系列额外的成像和测试,
SONCAT – 声纳校准和训练系统
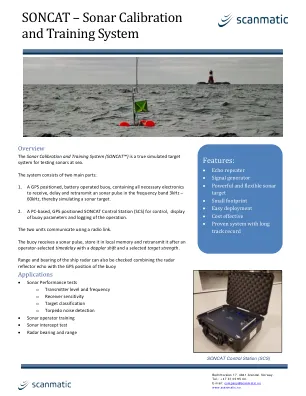
概述 声纳校准和训练系统 (SONCAT™) 是用于测试海上声纳的真实模拟目标系统。该系统由两个主要部分组成: 1. GPS 定位、电池供电的浮标,包含所有必要的电子设备,用于接收、延迟和重新发送 3kHz – 60kHz 频段的声纳脉冲,从而模拟声纳目标。 2. 基于 PC、GPS 定位的 SONCAT 控制站 (SCS),用于控制、显示浮标参数和记录操作。两个单元使用无线电链路进行通信。浮标接收声纳脉冲,将其存储在本地内存中,并在操作员选择的延时后以多普勒频移和选定的目标强度重新发送。还可以结合雷达反射器回波和浮标的 GPS 位置来检查船舶雷达的距离和方位