XiaoMi-AI文件搜索系统
World File Search System地下隧道

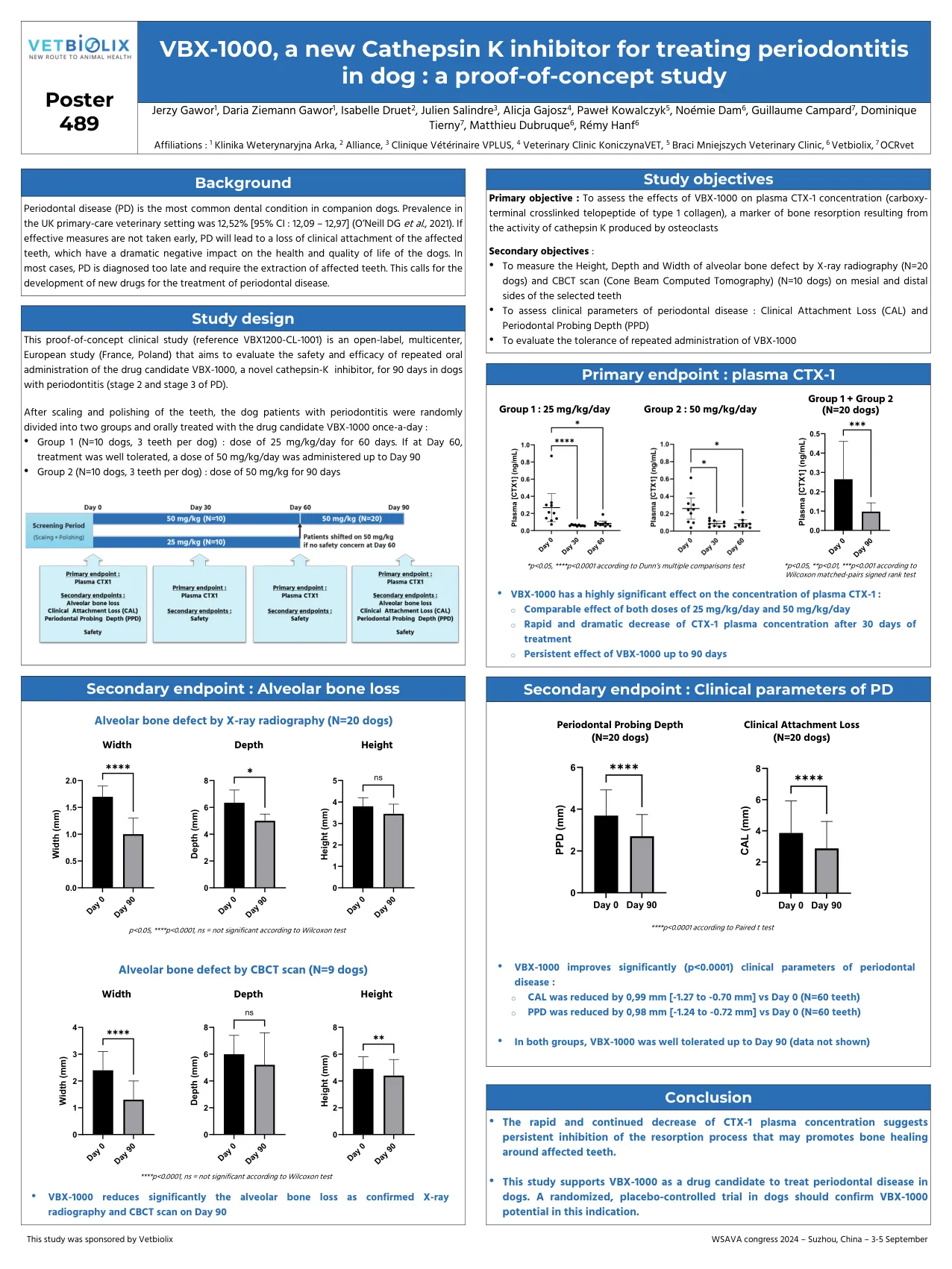
不同开门方式纵向通风地铁列车火灾临界速度及约束速度研究
临界速度、约束速度和烟气回流长度是隧道火灾烟气控制的重要因素。本研究旨在分析地铁列车车厢在隧道内停车时火灾时这3个关键烟气控制参数在不同开门情况下的相关性。对烟气的传播和控制进行了缩比模型实验测量和数值模拟。考虑了列车内的5个火灾位置和列车的两个侧门打开场景。结果表明,纵向通风系统启动时间对列车烟气回流长度几乎没有影响。然而,侧门的打开会导致列车烟气回流长度缩短。此外,我们建立了地下隧道双长狭窄空间内火灾引起的地下列车火灾的临界速度和约束速度的无量纲相关性。本研究为地下隧道内列车停车火灾的烟气控制系统设计提供了预测模型。
航空航天工程
EAR 成员,欢迎您阅读我们的第 10 期《肯尼亚工程》杂志。在本期中,我们关注航空。除了工程师在医学和核能领域的作用外,也许在航空领域,工程的惊人力量才得以实际应用。这并不是要贬低地下隧道或管道方面的伟大创新,这些创新迄今为止在地下隧道和海底管道中创造了工程奇迹。但是,喷气发动机创造了人类从世界一端移动到另一端的能力,而这仅仅是一个世纪前所需时间的一小部分,这本身就是一个奇迹。迄今为止,这些距离只能在非常危险的海上航行中通过水路覆盖。现在,您将听说,现在您可以在东京享用早餐,在纽约享用晚餐,感受这些长途航班的魅力。目前最长的一次飞行是从纽约飞往新加坡,不间断飞行大约需要 19 个小时。
变革性铁路 - Arup
垂直整合房地产开发在人口密集的亚洲城市尤为流行,但在世界其他地区也变得越来越普遍。水平整合也在增加,车站与高架人行道和地下隧道网络等设施相连,鼓励“步行性”和与更广泛的城市社区的连通性。总的来说,零售、办公和酒店空间都成为车站开发的一部分,模糊了交通和城市之间的界限。然而,这种功能的增加是有代价的。蜿蜒的走廊、隧道和自动扶梯会让旅客迷失方向、沮丧和不知所措。再加上高峰时段令人窒息的人群,这往往会导致不必要的压力体验,尤其是对于经常感到被排斥的老年人而言。

对爆炸碎片中粉末因子的预测和评估的回顾
粉末因子可以定义为打破岩石单位体积或吨(t)所需的爆炸物数量(kg)。通过爆破岩石的前景的特征是爆炸物的特定消费。在过去的几十年中,研究人员提出了几种精确的方法,以预测爆炸操作中的粉末因子或特定电荷,而不是通过试验爆炸。该领域的研究集中在岩体质量特性,爆破材料和爆破几何形状之间的关系上,以建立粉末因子。同样,已经研究了在洞穴理论中体现的特定能量和粒径之间的相互作用,而粒径较少依赖于当地条件。在本文中,已经审查了基于经验和洞穴理论建模的粉末因子估计方法,以及在表面基准爆破和地下隧道操作中的机器学习方法。还讨论了完整岩石特性对粉末因子分配的影响以及粉末因子选择对爆破后条件的影响。最后,在这方面指出了粉末因子估计中遇到的常见挑战。
2025-2030 年战略业务计划更新
• 我们全天候工作,确保向西雅图居民和企业提供水、废物和客户帮助;• 我们正在保护近 100,000 英亩的山区流域免受污染和野火的影响,为 160 万人提供安全可靠的饮用水;• 我们正在修建大型地下隧道,将溢流到当地水体的污水减少 89% 以上;• 我们正在投资绿色雨水基础设施和城市树冠,每年自然处理 8.2 亿加仑的污染雨水;• 我们正在合作清理杜瓦米什河的受污染沉积物,使南方公园和乔治城等环境正义社区受益;• 我们正在建立公私合作伙伴关系,通过防止食物垃圾进入垃圾填埋场和支持再利用网络来构建更循环的经济;并且• 我们正在向上游迈进,通过制定新的立法来减少浪费和污染,该立法要求生产商品和材料的公司设计更少的浪费,并支付产品回收或处置的费用。

洞察 - 国家物理实验室
建立从学术研究到最终用户的供应链。它认为英国可以将量子科学转化为军事和安全创新,然后进行大规模工业化。这样,英国将成为世界舞台上的主要参与者。Dstl 在量子格局文件中确定的量子技术有可能为英国创造财富做出贡献,并产生颠覆性的国防和安全能力。例如,量子传感提供的前所未有的精度水平将使一些更先进的概念的发展成为可能,例如“重力望远镜”。通过使用高灵敏度的量子设备测量重力场,可以推断出创建局部场的质量分布,从而形成图像。这种类似望远镜的设备可以让我们利用重力测量来识别和成像大质量物体,例如隐藏的致密金属物体,或地下隧道或天坑等空洞,甚至可以生成地下水资源的详细地图。更详细地探测石油和天然气储量可以实现更高效的开采,对经济产生潜在的巨大影响;石油开采量仅增加 1% 就可能带来数十亿英镑的附加值。随着单位价格的下降,城市群下方的土木工程和服务维护可能代表更大规模的市场。
洞察 - 国家物理实验室
建立从学术研究到最终用户的供应链。它认为英国可以将量子科学转化为军事和安全创新,然后进行大规模工业化。这样,英国将成为世界舞台上的主要参与者。Dstl 在量子格局文件中确定的量子技术有可能为英国创造财富做出贡献,并产生颠覆性的国防和安全能力。例如,量子传感提供的前所未有的精度水平将使一些更先进的概念的发展成为可能,例如“重力望远镜”。通过使用高灵敏度的量子设备测量重力场,可以推断出创建局部场的质量分布,从而形成图像。这种类似望远镜的设备可以让我们利用重力测量来识别和成像大质量物体,例如隐藏的致密金属物体,或地下隧道或天坑等空洞,甚至可以生成地下水资源的详细地图。更详细地探测石油和天然气储量可以实现更高效的开采,对经济产生潜在的巨大影响;石油开采量仅增加 1% 就可能带来数十亿英镑的附加值。随着单位价格的下降,城市群下方的土木工程和服务维护可能代表更大规模的市场。

对地下道路上爆炸引起的过度和突破的实验和数值研究
越来越多的问题是由于其对建筑成本和运营安全的影响,在地下隧道开挖期间的关键问题。面临跨越和爆破控制面临的一项关键挑战是在制定各种复杂工程条件方面的指南方面的困难。在这项研究中,使用焦点S 150激光扫描仪进行了一系列的越过和突破的领域测量,在中国的Kaiyang磷酸盐矿山的一条深处进行。根据收集到的点云数据准确分析了道路轮廓周围围绕道路轮廓周围的分布和范围。随后,建立了简化的三维模型,以模拟使用显式动态分析代码LS-DYNA的预压道路的爆炸发掘。的数值和测量结果的比较表明,该模型是模拟爆破发掘引起的过渡和未进行的可靠工具。此后,进一步研究了不可控制的地质因素(例如在原位应力条件下以及可控的爆破因子)的影响,包括轮廓孔间隙(S),电荷浓度(B)和解耦合(F)以及茎的脱钩。模拟结果表明,横向压力系数显着影响了过度和突破的分布模式,而应力幅度则导致了它们的范围。本研究的研究发现对类似的爆炸发掘项目具有重要意义。此外,对模拟发现的比较和场测量数据表明,分别在S = 0.70 m,b = 0.9 kg/m和f = 2.5的情况下获得了超爆破和未突破的最小范围。此外,轮廓蓝螺物被沙子造成的石头造成了较小的道路外围岩石质量的损坏,并增强了爆炸能量的利用率。
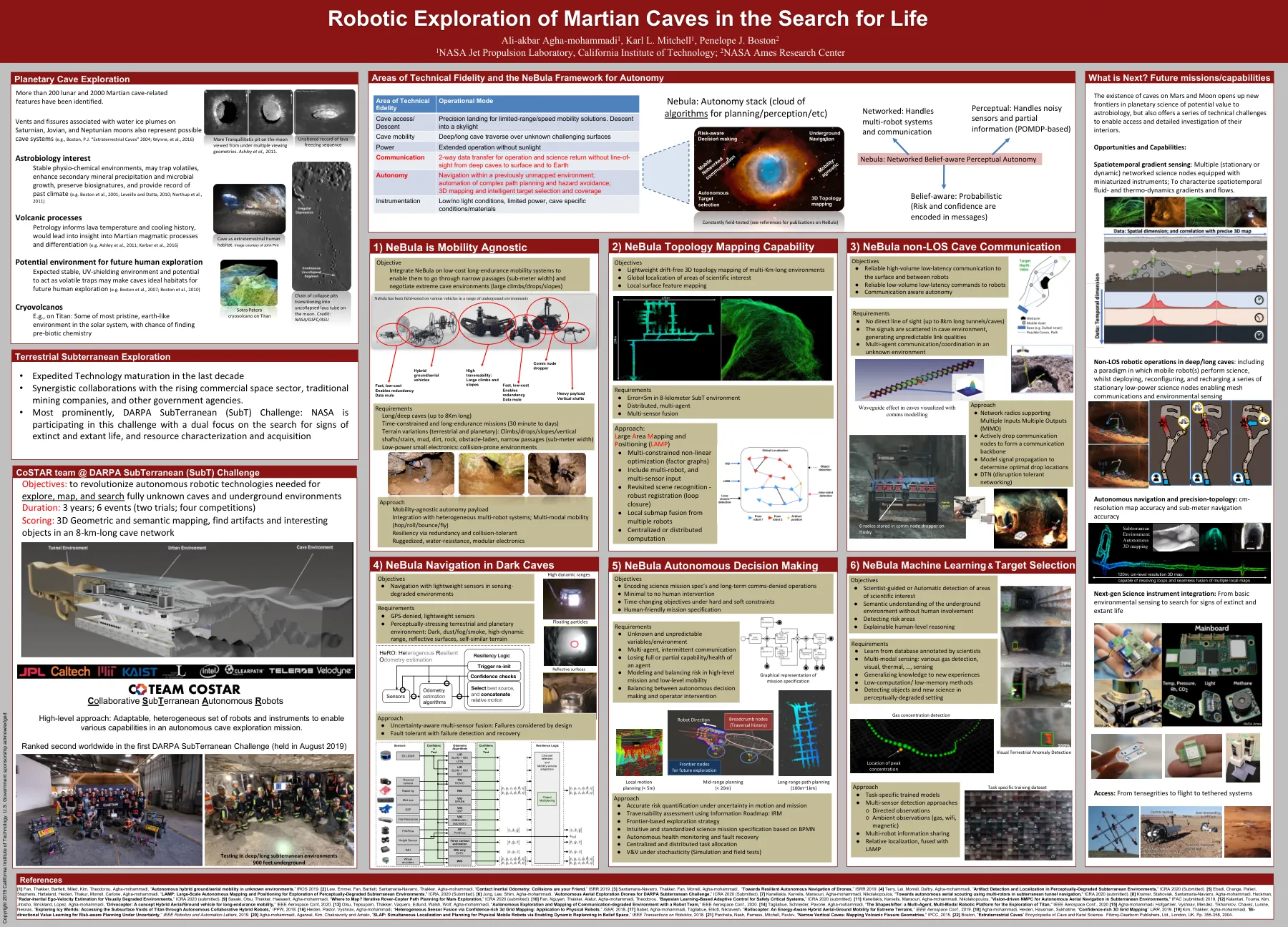
机器人探索火星洞穴寻找生命
[1] Fan,Thakker,Bartlett,Miled,Kim,Theodorou,Agha-Mohammadi,“自动杂种地面/未知环境中的空中移动性”,IROS 2019。[2] Lew,Emmei,Fan,Bartlett,Santamaria-Navarro,Thakker,Agha-Mohammadi,“接触惯性探测:碰撞是您的朋友,” ISRR2019。[3] Santamaria-Navarro,Thakker,Fan,Morrell,Agha-Mohammadi,“迈向无人机的弹性自动导航”,ISRR2019。[4] Terry,Lei,Morrell,Daftry,Agha-Mohammadi,“感知衰落的地下环境中的伪影检测和定位”,ICRA 2020(提交)。[5] Ebadi,Change,Palieri,Stephens,Hatteland,Heiden,Thakur,Morrell,Carlone,Carlone,Agha-Mohammadi。“灯:大规模的自主映射和定位,用于探索感知衰落的地下环境,” ICRA,2020年(提交)。[6] Jung,Lee,Shim,Agha-Mohammadi,“ DARPA地下挑战的自动空中勘探无人机”,ICRA 2020年(提交)。[7] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下隧道导航中使用多旋转器使用多旋翼的自主空中搜寻”,ICRA 2020(提交)。[8] Kramer,Stahoviak,Santamaria-Navarro,Agha-Mohammadi,Heckman,“视觉上降解环境的雷达惯性自我效率估计”,ICRA 2020(提交)。[9] Sasaki,Otsu,Thakker,Haesaert,Agha-Mohammadi,“在哪里映射?迭代的漫游者 - 弯曲器路径计划火星探索,” ICRA 2020(提交)。[10] Fan,Nguyen,Thakker,Alatur,Agha-Mohammadi,Theodorou。“基于贝叶斯学习的自适应控制对安全关键系统的自适应控制”,ICRA 2020(提交)。[11] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下环境中进行自主空中航行的视觉驱动的NMPC,IFAC(提交),[12],[12] [12]长期耐药性活动的概念混合空中/地面车辆。[13] Otsu,Tepsuporn,Thakker,Vaquero,Edlund,Walsh,Walf,Wolf,Agha-Mohammadi,“与机器人团队对贫困环境的自动探索和映射”[14] Tagliabue, Schneider, Pavone, Agha-mohammadi, “ The Shapeshifter: a Multi-Agent, Multi-Modal Robotic Platform for the Exploration of Titan, " IEEE Aerospace Conf., 2020 [15] Agha-mohammadi, Hofgartner, Vyshnav, Mendez, Tikhomirov, Chavez, Lunine, Nesnas, “探索冰冷的世界:通过自动协作混合机器人访问泰坦的地下空隙,” IPPW,2018。[16] Heiden,牧师,Vyshnav,Agha-Mohammadi,“通过置信度丰富的3D网格映射:应用于物理机器人的异质传感器融合:Iser,2018年。[17] SABET,AGHA-MOHAMMADI,TAGLIABUE,ELLIOTT,NIKRAVESH,“滚筒式:能源吸引能量的混合杂种空中地形迁移率对极端地形”,IEEE Aerospace Conf。,2019年。[18] Agha-Mohammadi,Heiden,Hausman,Sukhatme,“信心丰富的3D网格映射” IJRR,2019年。[19] Kim,Thakker,Agha-Mohammadi,“不确定性下的风险感知计划的双向价值学习”,IEEE机器人和自动化信,2019年。[21] Parcheta,Nash,Parness,Mitchell,Pavlov,“狭窄的垂直洞穴:映射火山裂缝几何形状”,IPCC,2015年。pp。[20] Agha-Mohammadi,Agarwal,Kim,Chakravorty和Amato,“ Slap:通过在信仰空间中启用动态重建的物理移动机器人的同时本地化和计划,”机器人技术的IEEE Transactions,2018。[22]波士顿,“洞穴和喀斯特科学的百科全书”。Fitzroy-Dearborn Publishers,Ltd。,英国伦敦。355-358,2004。