XiaoMi-AI文件搜索系统
World File Search System坚振
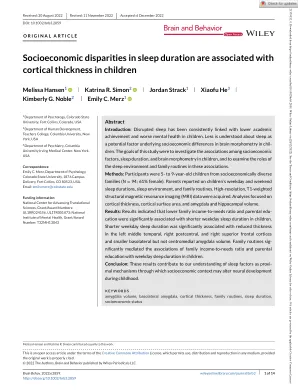
睡眠持续时间的社会经济差异与儿童的皮质厚度有关
图4父母的教育与(a)左中间回(MTG),(b)右中央回(PCG)和(c)右上额回(SFG)通过工作日睡眠持续时间间接地与(a)左中间颞回(MTG),(b)右中心回(PCG)和(c)右中心回(PCG)和(c)儿童的右中心回(SFG)间接相关。父母教育和CT之间的坚实线代表了总效应(C路径),而虚线表示间接效应后的直接效应(cʹ路径)。* p <.05,** p <.01
新闻发布的中心粒如何快速发展
研究基于人类边界科学计划(HFSP)(RGP0025/2021),BBSRC(BB/V003984/1),日本科学与技术机构(JST)CREST(问题NO.:JPMJCR15O1),Sakigake,Sakigake(问题:JPMJPR20K3)。学术变化领域研究(学术研究支持基金会(高级基因组支持)(问题:22H04925),基础研究(C)(问题号:21K06284),这是在特殊促销研究(主题:21H04977),基础研究(A)(主题号:23H00365)的支持下进行的,皇家学会奖项(UF160222,RF/RF/ERE/221032,URF/R/R/R/221024同步)。
超导体/铁磁异质结构
Al 中的自旋寿命。(c)由不同自旋轨道耦合强度参数(b 分别为 0.1、0.02 和 0.005)的隧道磁阻 (TMR) 比推导的自旋寿命的温度依赖性。(d)超连续磁共振涡旋介导的自旋电流示意图。上平面:自旋角动量和超连续磁共振涡旋涡度之间的嬗变。下图:磁性绝缘体 (MI)/SC/MI 结构中通过超连续磁共振涡旋液体进行自旋传输的理论预测。(e)用于探测磁振子和涡旋之间耦合的 Nb/Py 异质结构的器件结构。金电极用作天线来激发和检测 Py 中的磁振子自旋波。(f)归一化的磁振子自旋波传输图与平面外磁场和自旋波频率的关系。两个带隙特征与第一和第二布拉格散射条件吻合得很好。 (bc) 改编自参考文献 [8],经许可,版权归 Springer Nature 2010 所有。(d) 改编自参考文献 [9],经许可,版权归 APS 2018 所有。(ef) 改编自参考文献 [41],经许可,版权归 Springer Nature 2019 所有。
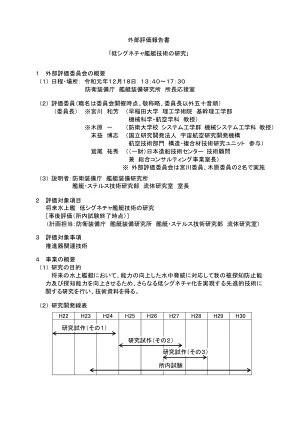
外部评估报告《低特征舰船技术研究》
利用复合材料减少船上设备的振动传输 ⇒ ①② 利用信号处理减少声纳罩内的噪声 ⇒ ② 利用自适应机翼减少螺旋桨的辐射噪声 ⇒ ①② 通过优化船头形状减少破浪 ⇒ ②


量子化学理论与人工智能技术结合
作者简介:清野淳二 2005年毕业于东京都立大学理学部化学科。2007年结业于东京都立大学理学研究科化学硕士课程。2010年结业于东京都立大学理工学研究科分子材料化学博士课程。同年4月成为早稻田大学理工学部助理研究员。2012年成为日本学术振兴会研究员(PD)。2015年成为早稻田大学理工研究所副研究员。2017年成为日本科学技术振兴机构PRESTO研究员(兼任)。2020年成为东京都立大学理学部化学科特任副教授。 2010年获理学博士学位。 [专业] 化学信息学,量子化学。 [联系方式] 〒169-0007 东京都新宿区大久保3-4-1(工作地点)

结构化稳健综合在灵活飞机颤振抑制中的应用
摘要 — 本文介绍了一种针对具有参数和动态不确定性混合的系统的结构化鲁棒控制设计方法。所提出的方法在分析步骤和综合步骤之间交替进行。在分析步骤中计算参数不确定性的样本,从而产生仅包含动态不确定性的不确定系统阵列。然后在这个不确定模型阵列上合成控制器。此合成步骤本身涉及为每个不确定系统构建 D 尺度和为整个缩放对象集合调整单个控制器之间的交替。控制器调整使用结构化控制设计技术执行。所提出的方法用于设计柔性飞机的颤振抑制控制器。飞机动力学由高保真模型和降阶模型描述。颤振抑制的设计目标是在存在混合不确定性的情况下实现稳健稳定。所提出的结构化设计方法产生了一个单一的、低阶的、线性时不变 (LTI) 控制器,可将颤振速度提高 15%。提供了额外的稳健性分析和高保真模拟来评估控制器性能。

结构化稳健综合在柔性飞机颤振抑制中的应用
摘要 — 本文介绍了一种针对具有参数和动态不确定性混合的系统的结构化鲁棒控制设计方法。所提出的方法在分析步骤和综合步骤之间交替进行。在分析步骤中计算参数不确定性的样本,从而产生一组仅包含动态不确定性的不确定系统。然后在此不确定模型阵列上合成控制器。此合成步骤本身涉及交替为每个不确定系统构建 D 尺度和为整个缩放对象集合调整单个控制器。控制器调整是使用结构化控制设计技术执行的。所提出的方法用于设计柔性飞机的颤振抑制控制器。飞机动力学由高保真度和降阶模型描述。颤振抑制的设计目标是在存在混合不确定性的情况下实现鲁棒稳定性。所提出的结构化设计方法产生了一个低阶线性时不变 (LTI) 控制器,可将颤振速度提高 15%。提供了额外的鲁棒性分析和高保真模拟来评估控制器性能。
结构化稳健综合在柔性飞机颤振抑制中的应用
摘要 — 本文介绍了一种针对具有参数和动态不确定性混合的系统的结构化鲁棒控制设计方法。所提出的方法在分析步骤和综合步骤之间交替进行。在分析步骤中计算参数不确定性的样本,从而产生一组仅包含动态不确定性的不确定系统。然后在此不确定模型阵列上合成控制器。此合成步骤本身涉及交替为每个不确定系统构建 D 尺度和为整个缩放对象集合调整单个控制器。控制器调整是使用结构化控制设计技术执行的。所提出的方法用于设计柔性飞机的颤振抑制控制器。飞机动力学由高保真度和降阶模型描述。颤振抑制的设计目标是在存在混合不确定性的情况下实现鲁棒稳定性。所提出的结构化设计方法产生了一个低阶线性时不变 (LTI) 控制器,可将颤振速度提高 15%。提供了额外的鲁棒性分析和高保真模拟来评估控制器性能。
面向能源与气候目标的建筑节能系统评价 胡山 1 周鑫 2 闫达 1 郭飞 3 洪天振 4
免责声明:本文件是作为美国政府资助工作的记录而编写的。尽管我们认为本文件包含正确的信息,但美国政府及其任何机构、加利福尼亚大学董事会及其任何员工均不对所披露的任何信息、设备、产品或流程的准确性、完整性或实用性做任何明示或暗示的保证,也不承担任何法律责任,也不表示其使用不会侵犯私有权利。本文中以商品名、商标、制造商或其他方式提及任何特定商业产品、流程或服务,并不一定构成或暗示美国政府或其任何机构或加利福尼亚大学董事会对其的认可、推荐或支持。本文中表达的作者的观点和意见不一定代表或反映美国政府或其任何机构或加利福尼亚大学董事会的观点和意见。