XiaoMi-AI文件搜索系统
World File Search System声波

飞秒光丝清除大气气溶胶
A. Goffin、J. Griff-McMahon、I. Larkin 和 HM Milchberg * 马里兰大学电子与应用物理研究所,马里兰州帕克分校,20742,美国 *milch@umd.edu 大气气溶胶(例如雾中的水滴)会通过散射和吸收干扰激光传播。飞秒光学细丝已被证明可以清除雾区,从而改善后续脉冲的传输。但详细的除雾机制尚未确定。在这里,我们直接测量和模拟半径约为 5 μm 的水滴(典型的雾)在飞秒细丝特有的光学和声学相互作用影响下的动态情况。我们发现,对于由准直近红外飞秒脉冲崩溃产生的细丝,主要的液滴清除机制是激光光学破碎。对于此类细丝,由细丝能量沉积在空气中发射的单周期声波不会影响液滴,也不会引起可忽略的横向位移,因此对雾的清除作用也微乎其微。只有当非细丝脉冲的聚焦程度很高时,局部能量沉积远远超过细丝,声波才会显著取代气溶胶。
结合 X 射线断层扫描、扫描声学显微镜 (SAM) 和横截面技术对电子元件检测的重要性
SAM 技术分析反射波和透射波的强度和相位,以创建反映样本声阻抗变化的视觉图像,从而揭示内部裂纹和缺陷,例如分层和空隙。在这种无损检测过程中,压电换能器会产生超声波,该换能器将电信号转换为声信号,反之亦然(检测阶段)。通过一组声透镜将声波聚焦在样本内部,以检查系统的内部。

多功能光纤光声发射器作为双向脑接口
具有“写”和“读”功能的双向脑接口可以成为神经系统疾病基础研究和潜在临床治疗的重要工具。本文报道了一种微型多功能光纤光声发射器 (mFOE),它集成了同时进行的光声刺激用于“写”和神经回路的电生理记录用于“读”。由于神经元具有对声波作出反应的内在能力,因此不需要病毒转染。光声波和电场之间的正交性提供了一种避免电刺激和记录之间干扰的解决方案。首先使用钙成像在培养的大鼠皮质神经元中验证了 mFOE 的刺激功能。在长达 1 个月的急性和慢性应用中,在小鼠海马中体内应用 mFOE 成功同时进行了光声刺激和脑活动电记录。这些应用后证实了轻微的脑组织损伤。 mFOE 实现的同时神经刺激和记录功能为神经回路的研究开辟了新的可能性,并为超声神经刺激的研究带来了新的见解。
利用飞秒灯丝清除大气气溶胶
A. Goffin、J. Griff-McMahon、I. Larkin 和 HM Milchberg * 马里兰大学电子与应用物理研究所,马里兰州帕克分校,20742,美国 *milch@umd.edu 大气气溶胶(例如雾中的水滴)会通过散射和吸收干扰激光传播。飞秒光学细丝已被证明可以清除雾区,从而改善后续脉冲的传输。但详细的除雾机制尚未确定。在这里,我们直接测量和模拟半径约为 5 μm 的水滴(典型的雾)在飞秒细丝特有的光学和声学相互作用影响下的动态情况。我们发现,对于由准直近红外飞秒脉冲崩溃产生的细丝,主要的液滴清除机制是激光光学破碎。对于此类细丝,由细丝能量沉积在空气中发射的单周期声波不会影响液滴,也不会引起可忽略的横向位移,因此对雾的清除作用也微乎其微。只有当非细丝脉冲的聚焦程度很高时,局部能量沉积远远超过细丝,声波才会显著取代气溶胶。
老年性黄斑变性您应该了解的内容
• 光学相干断层扫描。您可能听说过超声波,它使用声波来捕捉活体组织的图像。OCT 与超声波类似,只不过它使用光波,并且可以对任何可被光穿透的组织(例如眼睛)获得非常高分辨率的图像。在您的眼睛扩张后,您将被要求将头放在下巴托上,并在获取图像时保持几秒钟不动。光束不会造成疼痛。

空速校准测试的标准规范
风速校准是一种测试过程,其中风速测量仪器或风速计的输出与参考风速相关。在某些情况下,例如部署风传感器来测量大气风,则需要从校准表生成传递函数,并在测试报告中提供该传递函数。目前,有三个已发布的标准介绍了旋转风速计的测试协议:ASTM D 5096-02、ISO 17713- 1 和 IEC 61400-12-1。对于声波风速计,参考了两个已发布的标准:ASTM D 6011-96 和 ISO 16622。旋转和声波风速计通常用于天气测量。对于较小的风速仪器,如皮托管系统和热线风速计,ASTM D 3796-09 中提供了一种标准校准方法。所有这些标准的一个共同要求是,风速计校准必须在均匀流动、低湍流的风洞中进行,其中稳定状态的风条件会将风传感器的性能与某些因素(例如振动和偏角风)隔离开来。IEC 61400-12-1 和 ASTM D 3796-09 中的程序还规定,风洞参考速度应使用皮托管系统测量。另一方面,ASTM D 5096-02、ISO 17713-1、ASTM D 6011-96 和 ISO 16622 没有规定参考风速的特定测量系统,因此可以结合其他类型的风测量系统。在 NIST 空气速度校准
激光探索 1 - 波涛之下:看到证据......
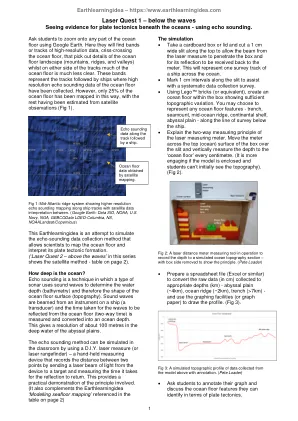
图1:中大西洋山脊系统显示较高的分辨率回声沿着船只轨道映射,并在卫星数据之间进行卫星数据解释。(Google Earth:Data Sio,NOAA,美国海军,NGA,Gebcodata ldeo-Columbia,NS,Noaalandsat/Copernicus)此EarthlearneNingIdea是一种试图模拟回声数据收集方法的试图,该方法允许科学家绘制海洋底层并解释其板块构造的板块。(本系列中的“激光任务2 - 在波浪上方”显示了卫星方法 - 第2页上的表)。海洋有多深?回声声音是一种技术,其中一种声纳使用声波来确定水深(测深),从而确定海底表面的形状(地形)。声波是从船上的仪器(换能器)上的仪器中射出的,并测量了从海底(双向时间)反射的波浪所花费的时间,并将其转换为海洋深度。这在深渊平原的深水中提供了约100米的分辨率。可以使用D.I.Y.可以在教室中模拟回声声音。激光测量(或激光测距仪) - 手持测量设备,通过将激光从设备发送到目标,并测量反射返回所需的时间,记录两个点之间的距离。这提供了涉及原则的实际证明。(它还补充了第2页的表中所引用的地球“建模海底映射”)

自主导航和...
I.引言带有障碍物检测的自动平衡线遵循机器人是一种高级自主设备,它可以整合路径跟踪,稳定性控制和避免障碍物功能。它利用红外传感器识别并遵循路径,该路径可以是白色表面上的黑线或黑色表面上的白色线,从而确保准确的导航。为了保持稳定性,机器人结合了陀螺仪和加速度计等传感器,即使在不规则的表面上也可以保持直立。以及线条跟踪和自动平衡,该机器人配备了使用超声传感器的障碍物检测机构。该传感器通过传输声波和解释返回的回声来计算机器人与任何对象之间的距离。障碍物检测功能可防止碰撞,从而使机器人更可靠和有效。但是,必须注意,由于其材料特性,超声传感器可能无法检测到某些对象,这可能不会有效地反映声波。机器人由Arduino Uno微控制器管理,该机器人控制器从红外传感器,稳定性传感器和超声波传感器中处理信息,以对运动,方向和平衡进行实时调整。这些功能使机器人非常适合诸如军事操作,交付系统,运输网络和帮助视力障碍的个人等应用。除了提到的功能外,自动平衡线跟踪机器人还包含高级控制算法,例如PID(比例构成 -