XiaoMi-AI文件搜索系统
World File Search System声纳浮标

使用多目标对多静态声纳浮标场进行调度
声纳浮标场由发射器和接收器网络组成,通常用于查找和跟踪水下目标。对于给定的环境和声纳浮标场布局,这种场的性能取决于调度,即决定哪个源应该传输,以及在任何给定时间应该从可用波形库中传输哪个源。在本文中,我们提出了一种基于多目标优化的新型调度框架。具体来说,我们将声纳浮标场的两个任务(跟踪和搜索)作为独立的、相互竞争的目标函数。使用此框架,我们提出了一种基于帕累托最优的调度特征。该特征描述了搜索跟踪目标之间的权衡,并在真实的多静态声纳浮标模拟中得到了证明。

使用 DIFAR 声纳浮标估计水下目标的深度
摘要:在现代反潜战中,有各种方法可以在二维空间中定位潜艇。为了更有效地跟踪和攻击潜艇,目标的深度是一个关键因素。然而,到目前为止,找出潜艇的深度一直很困难。本文提出了一种利用 DIFAR(定向频率分析和记录)声纳浮标信息(例如在 CPA(最近接近点)时或之前的接触方位和目标的多普勒信号)估计潜艇深度的可能解决方案。通过将勾股定理应用于目标和 DIFAR 声纳浮标水听器之间的斜距和水平距离来确定目标的相对深度。斜距是使用多普勒频移和目标的速度计算出来的。水平距离可以通过对两个连续的接触方位和目标的行进距离应用简单的三角函数来获得。仿真结果表明,该算法受仰角影响,仰角由声纳浮标与目标之间的相对深度和水平距离决定,精确测量多普勒频移至关重要。关键词:深度估计,DIFAR(定向频率分析和记录)声纳浮标,水下目标,多普勒效应

鲸类调查期间的声纳浮标声学数据收集
尽管存在潜力,但声纳浮标特有的众多复杂因素可能会对使用 DIFAR 信号进行方位角估计的准确性、声学数据的质量以及数据解释产生负面影响。本报告旨在确定数据收集方法,以缓解许多与依赖声纳浮标进行声学记录和方位角估计的海洋哺乳动物声学研究相关的问题。这包括建议的数据收集硬件和软件方法、硬件系统的校准以及部署和校准声纳浮标的协议和方法。这些硬件和软件方法预计会随着时间的推移而发生变化,在实施涉及声纳浮标的研究计划之前,应考虑最近的技术进步。
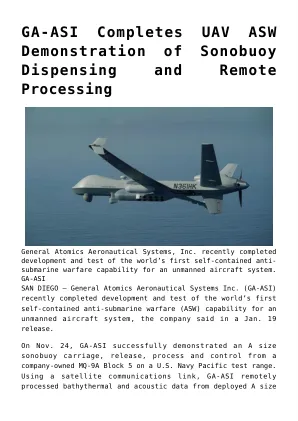
GA-ASI 完成无人机 ASW 声纳浮标投放和远程处理演示
GA-ASI 于 2017 年首次在 MQ-9A 上演示了声纳浮标远程处理能力。此后,GA-ASI 增加了声纳浮标管理和控制系统 (SMCS) 来监控和控制部署的声纳浮标,并开发了气动声纳浮标分配系统 (SDS),该系统能够安全地携带和部署每个吊舱 10 个符合美国海军标准的 A 尺寸或 20 个 G 尺寸的声纳浮标。MQ-9B SeaGuardian 有四个机翼站,可携带多达四个 SDS 吊舱,使其能够携带和分配多达 40 个 A 尺寸或 80 个 G 尺寸的声纳浮标,并在世界任何地方远程执行反潜战。

声呐浮标从二战到冷战的演变
主要的机载反潜战传感器——消耗性声纳浮标是在第二次世界大战期间为应对德国 U 型潜艇对大西洋上的盟军船只造成的毁灭性破坏而开发的。20 世纪 40 年代从飞机上扔出的简单无线电连接监听装置对空中反潜战产生了革命性的影响。在随后的几十年中,声学声纳浮标的发展遵循了多个方向。从第二次世界大战中第一个无源全向宽带声纳浮标 AN/CRT-1,到冷战时期的无源定向窄带声纳浮标 AN/SSQ-53 DIFAR 和 AN/SSQ-77 VLAD,以及主动定向声纳浮标 AN/SSQ-62 DICASS,声纳浮标的能力和战术部署不断发展,以应对日益复杂的苏联潜艇威胁。结合声纳浮标的发展及其不断改进的技术,以及其多种表现形式,对声纳浮标的发展进行了描述,以应对不断发展的威胁。阐述了从 CODAR 到 Julie and Jezebel 再到 DIFAR 的作战概念的进步,并讨论了水下声学和海洋环境的进步对声纳浮标设计的影响。声纳浮标是一种简单、可靠、廉价、技术复杂、适应性强且有效的设备,已生产了数百万台,并使用了近七十年。

使用“azigrams”显示声纳浮标的生物声学方向信息
AN/SSQ-53 定向频率分析和记录 (DIFAR) 声纳浮标是一种消耗性设备,可以沿两个正交水平轴推导出声粒子速度以及声压。通过此信息,只需一个紧凑型传感器便可计算出低频声源的方位角。估算这些传感器方位角的标准方法是通过传统的波束形成(即添加加权时间序列),但得到的“心形”波束模式不精确、计算成本高,并且对于弱信号容易受到方向性噪声污染。这里演示了一种替代乘法处理方案,该方案计算声信号的“有效强度”以获取噪声场作为时间和频率函数的主要方向性。此信息可以方便地显示为“方位图”,类似于频谱图,但使用颜色来表示方位角而不是强度。来自多个位置的数据证明了这种方法,无需对原始信号进行解复用即可进行计算。Azigram 已用于帮助诊断声纳浮标问题、提高可检测性和估计低信噪比信号的方位。Azigram 还可以增强对定向噪声场中嵌入信号的检测和潜在分类。V C 2019 美国声学学会。https://doi.org/10.1121/1.5114810

开发用于确定弹道导弹撞击点的全球定位系统/声纳浮标系统
应答器声纳浮标导弹撞击定位系统 (DOT I SMILS),利用由任务支援飞机投放的几种类型的声纳浮标。典型的声纳浮标直径为 4.5 英寸,长度不到 36 英寸。当浮标从飞机上自由落体时,一个小型阻力降落伞会展开,并稳定浮标坠入水中。撞击时,降落伞会释放,天线会竖起。在某些浮标中,天线位于小气球(浮子)组件中,该组件由声纳浮标中压力瓶中的气体充气。气球为浮标提供额外的浮力,并保护天线免受盐雾侵害。在气球充气的同时,浮标会释放一个水听器组件,该组件下降到大约 30 英尺的深度。水听器拾取其他浮标产生的声学信号和每次再入飞行器撞击的声音,并通过甚高频无线电链路将该信息传输到上空盘旋的任务支援飞机。阵列中的某些浮标部署了第二个水听器,将声学应答器命令信号注入水中。图 1 所示的导弹撞击定位系统中使用了各种类型的浮标。测速浮标测量水中的声速,而深海温度计浮标测量温度
声呐浮标从二战到冷战的演变
主要的机载反潜战传感器——消耗性声纳浮标是在第二次世界大战期间为应对德国 U 型潜艇对大西洋上的盟军船只造成的毁灭性破坏而开发的。20 世纪 40 年代从飞机上扔出的简单无线电连接监听装置对空中反潜战产生了革命性的影响。在随后的几十年中,声学声纳浮标的发展遵循了多个方向。从第二次世界大战中第一个无源全向宽带声纳浮标 AN/CRT-1,到冷战时期的无源定向窄带声纳浮标 AN/SSQ-53 DIFAR 和 AN/SSQ-77 VLAD,以及主动定向声纳浮标 AN/SSQ-62 DICASS,声纳浮标的能力和战术部署不断发展,以应对日益复杂的苏联潜艇威胁。结合声纳浮标的发展及其不断改进的技术,以及其多种表现形式,对声纳浮标的发展进行了描述,以应对不断发展的威胁。阐述了从 CODAR 到 Julie and Jezebel 再到 DIFAR 的作战概念的进步,并讨论了水下声学和海洋环境的进步对声纳浮标设计的影响。声纳浮标是一种简单、可靠、廉价、技术复杂、适应性强且有效的设备,已生产了数百万台,并使用了近七十年。
声呐浮标从第二次世界大战到冷战的演变
主要的机载反潜战传感器——消耗性声纳浮标是在第二次世界大战期间为应对德国 U 型潜艇对大西洋上的盟军船只造成的毁灭性破坏而开发的。20 世纪 40 年代从飞机上扔出的简单无线电连接监听装置对空中反潜战产生了革命性的影响。在随后的几十年中,声学声纳浮标的发展遵循了多个方向。从第二次世界大战中第一个无源全向宽带声纳浮标 AN/CRT-1,到冷战时期的无源定向窄带声纳浮标 AN/SSQ-53 DIFAR 和 AN/SSQ-77 VLAD,以及主动定向声纳浮标 AN/SSQ-62 DICASS,声纳浮标的能力和战术部署不断发展,以应对日益复杂的苏联潜艇威胁。随着声纳浮标技术的不断改进和其多种表现形式的发展,本文结合不断发展的威胁进行了描述。阐述了从 CODAR 到 Julie and Jezebel 再到 DIFAR 的作战概念的进步,并讨论了水下声学和海洋环境的进步对声纳浮标设计的影响。声纳浮标是一种简单、可靠、廉价、技术复杂、适应性强且有效的设备,已生产了数百万个并使用了近七十年。
声呐浮标从第二次世界大战到冷战的演变
主要的机载反潜战传感器——消耗性声纳浮标是在第二次世界大战期间为应对德国 U 型潜艇对大西洋上的盟军船只造成的毁灭性破坏而开发的。20 世纪 40 年代从飞机上扔出的简单无线电连接监听装置对空中反潜战产生了革命性的影响。在随后的几十年中,声学声纳浮标的发展遵循了多个方向。从第二次世界大战中第一个无源全向宽带声纳浮标 AN/CRT-1,到冷战时期的无源定向窄带声纳浮标 AN/SSQ-53 DIFAR 和 AN/SSQ-77 VLAD,以及主动定向声纳浮标 AN/SSQ-62 DICASS,声纳浮标的能力和战术部署不断发展,以应对日益复杂的苏联潜艇威胁。随着声纳浮标技术的不断改进和其多种表现形式的发展,本文结合不断发展的威胁进行了描述。阐述了从 CODAR 到 Julie and Jezebel 再到 DIFAR 的作战概念的进步,并讨论了水下声学和海洋环境的进步对声纳浮标设计的影响。声纳浮标是一种简单、可靠、廉价、技术复杂、适应性强且有效的设备,已生产了数百万个并使用了近七十年。