XiaoMi-AI文件搜索系统
World File Search System外环
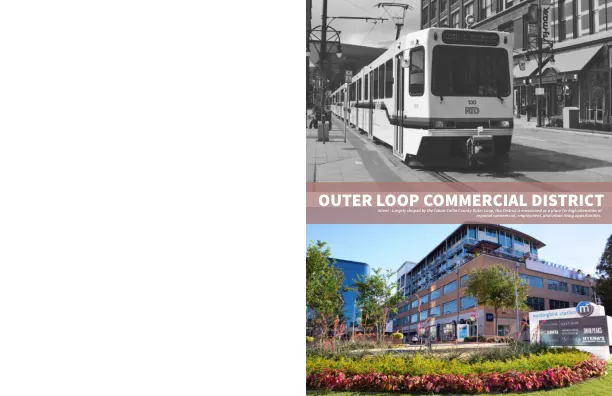
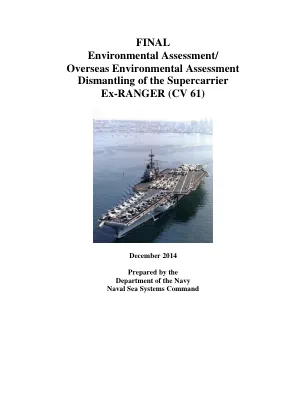
海外环评拆解……
美国海军部 (DON 或“海军”) 已编制此环境评估/海外环境评估 (EA/OEA),以评估导致拆除航空母舰(“超级航母”)前 RANGER (CV 61) 的行动对环境的潜在影响。由于前 RANGER 有资格列入国家史迹名录 (NRHP),因此需要 EA/OEA。该船目前停泊在华盛顿州布雷默顿的海军海上系统司令部 (NAVSEA) 退役舰艇现场维护办公室 (INACTSHIPMAINTO)。DON 分析了潜在的拟议行动替代方案拆除地点。处理前 RANGER 的其他选项也曾被考虑过,但最终被否决。DON 还分析了不采取行动的替代方案。拟议行动是将退役游骑兵号拆解交付订单授予位于德克萨斯州布朗斯维尔航区(以下简称“德克萨斯州布朗斯维尔”或“布朗斯维尔”)的三家拆解承包商之一后将采取的相关行动,这些承包商能够拆解退役游骑兵号大小的船只。海军的拆解合同要求承包商将退役游骑兵号从其目前位于华盛顿州布雷默顿的位置拖到布朗斯维尔的中标工厂,并要求承包商根据所有适用的联邦、州和地方法律法规对其进行拆解和回收。拟议拆解该船只的目的是执行海军作战部长 (CNO) 对从海军舰艇登记册中除名并指定处置的闲置船只的政策。提议的行动是为了减少海军的闲置舰船库存,并消除继续将老化的舰船保持在安全存放状态所产生的成本。退役游骑兵号于 1993 年 7 月 10 日退役,服役 36 年后。退役后,退役游骑兵号被长期搁置,作为可能在未来重新启用的动员资产。随后,她于 2004 年 3 月 8 日从海军舰船登记册 (NVR) 中被除名,并被宣传捐赠给州或非营利组织,用作博物馆/纪念馆。但是,没有一个组织能够满足海军对舰船捐赠的最低要求。退役游骑兵号于 2012 年 9 月 26 日从捐赠名单中被移除,并被指定拆除。1500-1508 部分,行政命令 (E.O.)12114-主要联邦行动对国外环境的影响,以及 DON 内实施 NEPA 的政策和责任,32 C.F.R.本 EA/OEA 是根据 1969 年《国家环境政策法》(NEPA)(42 美国法典(U.S.C)§§4321-4370d)编制的,由环境质量委员会(CEQ)法规(40 联邦法规(C.F.R.))实施第 775 部分,并评估了拟议行动对以下资源领域的潜在影响:文化资源;水资源、生物资源和空气质量。

舰载机外环控制因素
外环控制因素是影响飞行员在最后进近期间手动调节下滑道、迎角和队列的能力的因素。本报告集中讨论前两个因素,即下滑道和迎角。目标是确定确保有效外环控制的关键属性,然后检查现有设计要求如何很好地解决这些属性。飞行品质和性能要求的组合适用于此领域,包括 MIL-F-8785C、MIL-STD-1797A 和海军的进近速度标准。首先,报告回顾了该主题的历史背景,讨论了技术方法,并预览了要应用的分析工具。其次,它给出了外环控制的状态,包括对航母着陆任务的描述、现有飞机特性以及一些描述飞行中模拟航母进近的数据。接下来的描述包含任务、飞机和飞行员的数学模型组件。报告的主要部分介绍了一系列有助于确定关键外环控制特性的分析。最后一部分给出了实施结果的结论和建议。技术方法适用

视觉锚定:利用视觉通过 UAS 绕目标运行...
符号 d tgt 到目标的欧几里德距离(斜距) DC 飞机与图像中心之间的地面半径 DX Y 轴截距与目标之间的地面距离 DY 飞机与 Y 轴截距之间的地面半径 DT 飞机与目标之间的地面半径 F b 机身框架连接到飞机 F c 相机框架连接到相机 F 中心 向心力 F n 北/东/下框架(惯性) g 地球重力加速度 h AGL 目标上方高度(地面以上) h des 所需轨道高度 KD φ 滚转内环微分增益 KD θ 俯仰内环微分增益 KD 外环微分增益 KI h 高度保持积分增益 KP h 高度保持比例增益 KP 外环外环控制器比例增益 KP ˙ ψ 转弯协调器比例增益 KP φ 滚转内环比例增益 KP θ 俯仰内环比例增益 LC 飞机与图像中心之间的斜距 LY 飞机与 Y 轴截距之间的斜距 LT飞机与目标之间的斜距 m 飞机质量 PE 位置向东 PN 位置向北 p 飞机倾斜率 q 飞机俯仰率 r 飞机航向(偏航)率 R 实际轨道半径 ˙ R 实际半径率 R des 所需轨道半径 S x 相机水平分辨率 S y 相机垂直分辨率 t 时间 VA 飞机空速 V CM / e 飞机相对于惯性系的速度 VW / e 风相对于惯性系的速度 V tgt / e 目标相对于惯性系的速度 W 飞机重量 X tgt 目标的 X 坐标 Y tgt 目标的 Y 坐标

使用离散模型跟随的横向自动驾驶仪设计...
简介 许多方法已用于设计飞机自动驾驶仪。Taha 等人。(2009) 状态反馈、极点配置、滞后控制器和模型参考自适应控制技术已用于爬升率自动驾驶仪的设计。No 等人。(2006) 经典根轨迹和波特频率法用于设计高度稳定、速度和飞行路径角自动驾驶仪。此外,零努力脱靶概念也被有效用于提出适用于任意轨迹跟踪控制问题的制导律。在所提出的制导方案中,命令以速度、飞行路径和航向角的形式给出,以便它们可以轻松地与现有的控制配置相匹配,Giampiero 等人。(2007) 编队控制的设计基于内环和外环结构。平面外环制导律采用反馈线性化设计,而垂直通道的外环采用补偿器设计。内环线性控制器也是使用经典补偿方法设计的,Taha 等人。(2009) 设计了一个监督控制系统来管理不同自动驾驶仪的接合和脱离,并将命令输入传递给它们,使飞机实现所需的轨迹。在本文中,使用离散时间的模型跟踪技术设计了不同的自动驾驶仪。选择这些自动驾驶仪是为了将它们用于制导系统,以促使飞机在横向规划中实现特定的飞行路径。这些自动驾驶仪包括倾斜角、航向和水平环路自动驾驶仪。每个自动驾驶仪都将在飞机非线性模拟程序 (Brain, 1992) 上进行模拟,以说明飞机的响应并检查其实现平稳和可接受的机动的能力。本文使用了飞行条件 3 下的 Delta Aircraft 数据 (Etkin, 1982)。自动驾驶仪设计程序

F-16 地面防撞验证挑战...
基准测试提案:F-16 战鹰是一种机动性极强的飞机,自 20 世纪 70 年代开始生产。从那时起,已有多项研究和书籍对飞机的性能进行了调查,并创建了仿真模型。在本文中,我们将其中一些模型作为验证挑战,提供 MATLAB 和 Python 代码来模拟 F-16 执行地面防撞以及其他自主机动。飞机模型和内环控制器具有 16 个连续变量和分段非线性微分方程。自主机动由外环控制器使用有限状态机执行,其中保护涉及连续变量。根据飞机飞行限制和模型边界提供通过/失败规范。该模型旨在成为分析航空航天系统详细行为的起点。

参考:Minja Antony Charles,AG Karthick Raj,Raes Arno,Borah Rituraj,Verbruggen Sammy。
图1。(a)目前使用的系统,这些系统结合了电源器和光伏技术,从太阳能产生了81种绿色氢。(b)直接在阳光下运行的光电化学细胞,不需要光伏面板。(c)示意图,显示了光电在PEC细胞中的操作。(d)示意图83各种非金属金属光(由它们的材料组成分类)的示意图。还84个展示了影响内部和外环PEC水分分裂的实验参数和优势,分别为85。86 87

在存在运动和动态干扰的情况下,自适应双环轨迹跟踪船舶表面车辆的控制
本文介绍了针对海洋表面车辆(MSV)的双环自适应轨迹跟踪控制系统,该系统既解决运动学和动态干扰。该方法始于外环的后台控制策略,该策略在运动级别生成速度命令,以确保对MSV的位置和标题进行准确跟踪。一个自适应估计器已整合以评估未知的海洋电流速度,从而有效地补偿了其影响。内环控件采用线性参数化来在动态级别产生扭矩命令,从而确保实际速度和指挥速度状态之间的对齐。提出了两种自适应调整定律:一个用于估算具有挑战性的水动力参数,另一个用于补偿外部海洋干扰。双环控制可显着减轻运动学和动态干扰的影响,从而提高了MSV跟踪的精度和整体性能。稳定性,并得出了系统未知参数的适应定律。数值模拟证明了拟议的控制策略的功效。

研究文章 无人机的 L1 自适应控制方案...
本文介绍了一种用于无人机 (UAV) 舰载着陆的 L 1 自适应控制器,该控制器增强了动态逆控制器。三轴和功率补偿器 NDI (非线性动态逆) 控制器作为此架构的基线控制器。内环命令输入是滚转速率、俯仰速率、偏航速率和推力命令。外环命令输入来自制导律,用于校正下滑道。然而,不完善的模型逆和不准确的气动数据可能会导致性能下降,并可能导致舰载着陆失败。L 1 自适应控制器被设计为增强控制器,以解决匹配和不匹配的系统不确定性。通过蒙特卡罗模拟检查了控制器的性能,显示了基于非线性动态逆开发的 L 1 自适应控制方案的有效性。