XiaoMi-AI文件搜索系统
World File Search System多架

智能电热 架- SMART ELECTRIC TOWEL WARMER
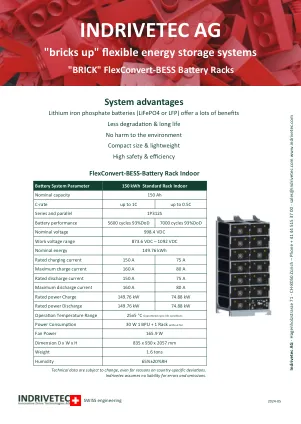
Technical Parameter 额定功率/Power : 100W 额定电压/Voltage : 220V/50Hz 防水等级/Waterproof : IPX4 机身材质/Material : 岩板/Sintered Stone

JETFLY 接收第五架 PC-24 和第一架 PC-12 NGX
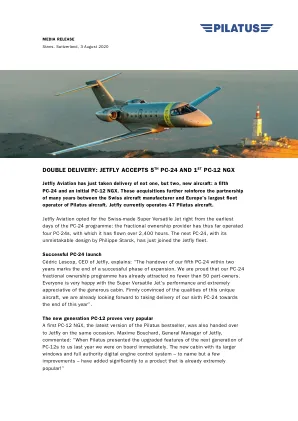
Jetfly Aviation 刚刚接收了两架新飞机:第五架 PC-24 和首架 PC-12 NGX。这些收购进一步加强了这家瑞士飞机制造商与欧洲最大的皮拉图斯飞机机队运营商之间的多年合作伙伴关系。Jetfly 目前运营着 47 架皮拉图斯飞机。Jetfly Aviation 从 PC-24 项目初期就选择了瑞士制造的超级多功能喷气式飞机:这家部分所有权提供商迄今为止运营了四架 PC-24,飞行时间超过 2,400 小时。下一架 PC-24 由 Philippe Starck 设计,设计独特,刚刚加入 Jetfly 机队。PC-24 成功交付 Jetfly 首席执行官 Cédric Lescop 解释道:“我们在两年内交付了第五架 PC-24,这标志着我们成功扩张阶段的结束。我们很自豪,我们的 PC-24 部分所有权计划已经吸引了不少于 50 名部分所有者。每个人都对这款超级多功能喷气式飞机的性能非常满意,并且非常欣赏其宽敞的客舱。我们坚信这款独特飞机的品质,并期待在今年年底交付我们的第六架 PC-24”。新一代 PC-12 非常受欢迎 第一架 PC-12 NGX,皮拉图斯畅销机型的最新版本,也在同一场合交付给了 Jetfly。Jetfly 总经理 Maxime Bouchard 评论道:“去年,当 Pilatus 向我们展示下一代 PC-12 的升级功能时,我们立即就接受了。新的客舱配有更大的窗户和全权数字发动机控制系统 - 仅举几例改进 - 为这款已经非常受欢迎的产品增添了显著的增色!”


多架无人机的自适应人机交互
摘要:无人机系统 (UAS) 的进步为逐步提高智能和自主水平铺平了道路,支持新的操作模式,例如一对多 (OTM) 概念,其中单个操作员负责监控和协调多架无人机 (UAV) 的任务。本文介绍了支持 OTM 应用中自适应自动化的认知人机界面和交互 (CHMI 2) 的开发和评估。CHMI 2 系统包括一个神经生理传感器网络和基于机器学习的模型,用于推断用户认知状态,以及包含一组用于控制/显示功能和离散自主级别的转换逻辑的自适应引擎。在离线校准阶段,根据过去的表现和神经生理数据对用户认知状态的模型进行训练,随后在在线适应阶段使用这些模型来实时推断这些认知状态。为了研究 OTM 应用中自适应自动化,开发了一个涉及丛林火灾检测的场景,其中单个操作员负责指挥多个无人机平台在广阔区域内搜索和定位丛林火灾。我们介绍了开发的 UAS 模拟环境的架构和设计,以及各种人机界面 (HMI) 格式和功能,以通过人机在环 (HITL) 实验评估 CHMI 2 系统的可行性。随后将 CHMI 2 模块集成到模拟环境中,提供实现自适应自动化所需的感知、推理和适应能力。进行了 HITL 实验以验证 CHMI 2

