XiaoMi-AI文件搜索系统
World File Search System多自由度
我在哪里?移动机器人定位的传感器和方法
第 1 章 航位推算用传感器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ................. ... . . . . . . . . . . . . . . 17 1.2.1 Micro-Trak Trak-Star 超声波速度传感器 . . . . . . . . . . . . . . . 18 1.2.2 其他多普勒效应系统 . . . . . . . . . . . . . . . . . . . 19 1.3 典型移动配置 . ................. ... ................. ... ................................................................................................................................................................................................................................................. 23 1.3.5 全向驱动....................................................................................................................................................................................................................................................... 25 1.3.6 多自由度车辆....................................................................................................................................................................................................................................... 25 1.3.6 多自由度车辆....................................................................................................................................................................................................................................... 26 . ...
采用非线性自回归外生模型的可穿戴 sEMG 传感器多自由度假手指关节控制器
摘要:手臂、手和指尖的活动功能和感觉信息的丧失妨碍了患者的日常生活活动 (ADL)。现代仿生假手可以弥补失去的功能并实现多自由度 (DoF) 运动。然而,由于传感器有限和缺乏稳定的分类算法,市售的假手通常具有有限的自由度。本研究旨在提出一种通过表面肌电图 (sEMG) 估计手指关节角度的控制器。用于训练的 sEMG 数据是使用商用 EMG 传感器 Myo 臂带收集的。提取时域中的两个特征并将其输入到具有外生输入的非线性自回归模型 (NARX) 中。使用 Levenberg-Marquardt 算法对 NARX 模型进行预选参数训练。与目标相比,模型输出的回归相关系数 (R) 在所有测试对象中均大于 0.982,信号范围为 [0, 255] 的任意单位时均方误差小于 10.02。研究还表明,所提出的模型可用于日常生活运动,具有良好的准确性和泛化能力。

结构振动阻尼模型 - 斯旺西大学
经典模态分析被扩展以处理一般非粘性阻尼多自由度线性动态系统。新方法与现有方法类似,但由于阻尼机制的非粘性效应而进行了一些修改。引入了(复杂)弹性模态和非粘性模态的概念,并提出了获取它们的数值方法。进一步表明,可以根据这些模态精确地获得系统响应。已知为无阻尼或粘性阻尼系统的模态正交关系已推广到非粘性阻尼系统。开发了几个将模态与系统矩阵相关联的有用结果。
洛克希德马丁公司的 F-35 坡道噪音和耐久性测试
确保太空系统在升空后完好无损 战斗机、导弹和卫星均需经过广泛的振动测试。对于太空系统,洛克希德马丁公司的 LDS 振动台测试可确保不同组件能够经受住发射、部署、运输和长期运行的严酷考验。记录数据是振动测试的关键组成部分,需要数据采集来测量发射时卫星和组件的情况。由于成本高、复杂性高,卫星振动鉴定测试是世界上监控最严格、运行最严格的测试之一。振动测试通常通过数百个通道同时采集数据进行,多振动台测试通常在极大的有效载荷或多自由度模拟中进行。
洛克希德马丁公司的 F-35 斜坡噪声和耐久性测试
确保太空系统在升空后完好无损 战斗机、导弹和卫星均需经过广泛的振动测试。对于太空系统,洛克希德马丁公司的 LDS 振动台测试可确保不同组件能够经受住发射、部署、运输和长期运行的严酷考验。记录数据是振动测试的关键组成部分,需要数据采集来测量发射时卫星和组件的情况。由于成本高、复杂性高,卫星振动鉴定测试是世界上监控最严格、运行最严格的测试之一。振动测试通常通过数百个通道同时采集数据进行,多振动台测试通常在极大的有效载荷或多自由度模拟中进行。
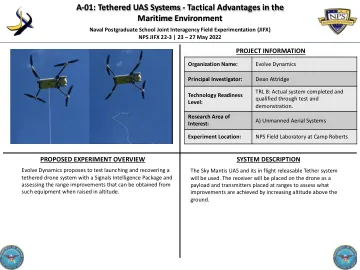
系留 UAS 系统 - 海上战术优势...
GreenSight LEANIS 系统是一种模块化多无人机发射和回收系统,专为高动态移动平台而设计,例如在高海况或崎岖地形上高速行驶的小型无人或载人船舶和地面车辆。主要子系统包括多架长航时 GreenSight Dreamer 无人机、多自由度机械臂、可堆叠的无人机存储和充电舱、无人机跟踪传感器、通信和计算单元以及电源单元。LEANIS 的突出功能是它能够在高动态平台上运行,使用机载惯性传感器和机械臂来取消车辆的运动,为无人机提供稳定的连接点。此功能使 LEANIS 能够快速自主地发射和回收整个无人机群,而不会中断车辆上的现有操作。

智能热驱动纺织品 | 哈佛生物设计实验室
由软材料制成的仿生执行器天生具有顺从性,能够适应环境,并能够进行仿生运动;[1–4] 因此,它们是与人类互动的设备的理想选择,包括可穿戴机器人。[5–7] 目前,大多数软机器人依靠通过系绳输送的加压流体,需要硬件(例如泵和阀门)来供应流体并控制其流量。这种硬件通常很重、噪音大、体积大,[1,2] 阻碍了轻便便携的可穿戴设备的实现,尤其是对于需要多个执行器阵列的应用,因为阀门和气动管路的数量与执行器的数量成比例。这可能对需要多个受控执行器的软机器人设备的开发构成挑战,例如可穿戴机器人用于协助多自由度肢体运动以进行辅助 [7] 或康复 [6] 或主动压力调节装置用于预防压疮或机械疗法应用。[8]
六自由度曲梁柔性机构的设计与建模
摘要:柔顺机构广泛应用于精密工程、微纳操作、微电子等前沿科技领域,对多自由度柔顺机构的需求急剧增加。随着自由度的增加,柔顺机构的结构变得越来越复杂。本文提出了一种基于曲梁单元的六自由度柔顺机构。该柔顺机构具有结构简单、自由度多的优点。利用等几何分析法,建立了该机构的模型。静态分析表明可生成六个自由度。通过3D打印开发了该机构的样机。进行了六自由度加载试验。输出与输入具有高度的线性关系,结构间耦合性较低。我们相信这项研究为基于曲梁单元的柔顺机构设计迈出了开创性的一步。
SSC-297 - 船舶结构委员会
本报告对松弛液化天然气货舱中的动态晃动载荷进行了评估。全面回顾了全球比例模型晃动数据。数据被简化为通用格式,以便定义设计载荷系数。回顾了液化天然气储罐的结构细节,重点是定义在设计液化天然气储罐以承受动态晃动载荷时必须考虑的独特设计特征。进行了额外的比例模型实验室实验,以补充可用的模型晃动数据。以组合自由度进行实验,以确定多自由度激励的潜力,以增加动态晃动载荷。还进行了实验以建立结构响应分析所必需的晃动动态压力-时间历史。还对全尺寸 LNG 船舶储罐结构的代表性段进行了实验,该储罐装载了模型结果预测的典型全尺寸动态晃动压力。进行了分析研究,以提供确定壁面结构对动态晃动载荷响应的技术。最后,介绍了膜式储罐和半膜式储罐、重力储罐和压力储罐的设计方法,其中设计程序从比较共振晃动周期与船舶周期开始,定义设计载荷,然后根据随储罐类型变化的划定程序设计受动态晃动载荷影响的储罐结构。