XiaoMi-AI文件搜索系统
World File Search System子系统
MT Alliance – 超市控制系统
1.1 MT Alliance 子系统 MT Alliance 系统是一个与智能分布式模块(称为节点)交互的软件平台。节点有助于监控和控制超市的子系统(图 1.1): 监控子系统 制冷子系统 HVAC 子系统 照明子系统 能源管理子系统 监控子系统每天 24 小时监控冷藏柜,以防止产品缩水。当易腐烂产品有丢失危险时,监控系统会发出警报,并指定在丢失产品之前应采取的步骤。安装在冷藏柜中的传感器测量冷藏柜和产品的温度,并检测除霜的结束。每个传感器包括: 可编程警报的下限 可编程警报的上限 可编程警报设定时间 可编程警报调用时间 监控子系统执行以下功能: 使用一分钟的采样间隔从传感器读取温度 保存传感器数据三年 (3) 显示冷藏柜中存储的各种产品类型及其相应的温度 以图形方式显示温度传感器的数据 MT Alliance 提供图形视图(图 1.2 和 1.3),显示冷藏柜的位置、每个柜中的产品类型以及产品温度。当冷藏柜温度超过设定的限值(下限、上限和报警设定时间)时,MT Alliance 系统: 通过将冷藏柜颜色从绿色变为红色来指示触发报警的柜子位置 在报警窗口中生成事件:报警来源、时间和原因 在报警中心生成报警信号

Smallsat Avionics
小型航天器航空电子(SSA)由航天器平台的所有电子子系统,组件,仪器和功能元素组成,包括主要的飞行子元素命令和数据处理(CDH)和飞行软件(FSW),以及其他关键飞行程序,以及其他关键飞行子系统,例如有效载荷和子系统Avions(PSA)(PSA)。这些子系统是为特定的任务平台,架构和协议配置的,并由适当的操作概念,开发环境,标准和工具约束。CDH和FSW是集成航空电子系统的大脑和神经系统,通常以某种方式与所有其他子系统(无论是在直接点对点,分布式,集成,集成还是混合计算模式)中提供指挥,控制,通信和数据管理界面。航空电子系统本质上是所有组件及其功能集成在航天器上的基础。由于任务的性质会影响航空电子建筑设计,因此航空电子系统的可变性很大。

人工智能背景下的工业物流发展
摘要。本报告的主要目的是阐明人工智能在工业物流系统的运作中将发生哪些变化。此外,还将说明全球物流的发展及其在技术发展各个阶段的特殊性。到目前为止的分析表明,物流工业系统将继续作为工业系统的子系统发挥作用,因为它们相互关联,具有某些相互关系,这些相互关系表征了它们的结构系统性和物流安全性。或者,当这些子系统之间的互连为整个工业物流系统的正常运作创造条件,为生产提供后勤支持时,物流系统将处于平衡状态。这本质上意味着,物质、财务和信息三种子系统之间的相互关系将与外部工业服务领域的子系统形成最佳关系。具有人工智能的物流系统子系统是该系统的一部分,它将允许在单独的物流活动或商业组织领域中解决物流系统的任务,并在更高层次上解决任务。人工智能物流系统的各组成部分按照一定的层次、方式和相互关系排列,形成更高层次的物流子系统,或人工智能物流系统。

Valmet DNA-AutomaAtioJärjestelmänElinkaarisuunnittelu
该论文由OY的Enersense委托。该公司在芬兰和外界处于强劲的增长状态。该公司的业务部门是行业,建筑,能源和电信。该公司的无利润能源是实施无排放能源。本文的目的是找出2023年和2024年电厂自动化设备和网络的生命周期。生命周期计划的早期阶段由电厂中的各个子系统和设备研究。生命的基础 - 基于先前的研究是重要的。该论文是作为发电厂的开发研究进行的。的任务是说明子系统部分的生命周期和依赖性。这项工作包括四个不同物理子系统以及虚拟服务器的设备和网络。结果,2023年和2024年子系统的生命周期计划是最新的。根据一项研究,子系统的大多数部分只能在2025年停止运作。的研究表明,即使某些子系统也具有更长的生命周期,并且所有子系统都需要在关闭之前和关闭后进行进一步的计划。

硬件在环系统的 AI/ML 数字孪生
2023 年,我们提出了这样的想法:对于某些子系统,使用 AI/ML 技术可以大大加速逆向工程任务的建模部分。与传统的建模和仿真技术相比,AI/ML 方法具有一个关键优势:传统的 M&S 开发人员需要成为子系统主题领域的专家,并且通常主要从定制开发的代码中生成模型,而 AI/ML 建模者则主要将子系统视为一个黑匣子,它只接收输入数据并产生输出数据,这个过程可以使用大多数现有的现成 AI/ML 工具箱进行建模。在最纯粹的形式中,AI/ML 模型只有一个目的:非常忠实地从输入中重现输出,而无需“了解”子系统内部的工作方式或数据代表什么。当然,子系统专家可以深入了解哪些行为最重要,哪些输入最能代表关键

TrustPoint“时光飞逝”立方体卫星技术描述
有效载荷子系统:有效载荷子系统执行 TrustPoint 的替代定位、导航和授时 (PNT) 服务所需的机载处理、RF 信号生成和高精度计时。有效载荷由用于有效载荷计算和波形生成的数字子系统、GNSS 接收器(参见上面的通信系统部分)、用于计时的时钟子系统和用于放大和过滤的 RF 模拟子系统组成。在总线底盘的外部,有效载荷与两个 C 波段发射天线、一个 C 波段接收天线和一个 GNSS 天线连接,所有这些都是共形非可展开贴片天线。总线底盘的外部还安装了一个激光反射器,用于支持高精度轨道测定的激光测距实验。

ITU-T 中网络控制自动化技术的5-1标准化活动 GNSS+ 2023
该体系结构还指定了几个参考点。RP-AN-1,RP-AN-2,RP-AN-3和RP-AN-6是KB子系统和底层网络之间的参考点,动态适应子系统,自治引擎,E2E网络编排和编排器,以启用这些子系统的KB访问KB。RP-AN-4是自主引擎和动态适应子系统之间的,可为动态适应子系统提供进化探索和实验功能。RP-AN-5位于动态适应子系统和底层网络之间,随着底层网络条件在运行时的变化,将控制器的选择和集成到底层网络。RP-AN-7,RP-AN-8和RP-AN-11是AN编排者和KB之间的参考点,分别是自主引擎和动态适应子系统,以使An Orking Trator能够管理AN和AN和LISECYCLE中的工作流程和流程。RP-AN-9,RP-AN-10,RP-AN-12是E2E网络乐团和编排者,自治引擎和动态适应子系统之间的参考点,由E2E网络编排器使用,这些系统用于管理和机弦乐网络实体。RP-AN-13是E2E网络编排和底层网络之间的参考点,用于管理和编排底层网络中的控制网络实体。
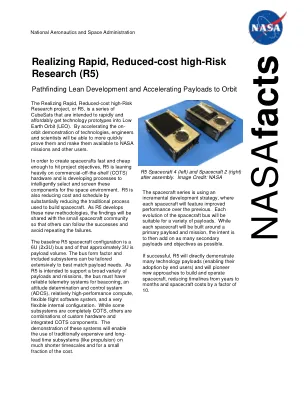
实现快速、低成本的高风险研究(R5)
基本 R5 航天器配置为 6U(2x3U)总线,其中约 3U 为有效载荷体积。总线外形尺寸和所包含的子系统可以进行广泛定制,以最好地满足有效载荷需求。由于 R5 旨在支持各种有效载荷和任务,因此总线必须具有可靠的信标遥测系统、姿态确定和控制系统 (ADCS)、相对高性能的计算、灵活的飞行软件系统和非常灵活的内部配置。虽然有些子系统完全是 COTS,但其他子系统则是定制硬件和集成 COTS 组件的组合。这些系统的演示将使人们能够在更短的时间内以很小的成本使用传统上昂贵且交付周期长的子系统(如推进系统)。
哈勃太空望远镜 - 天体物理科学部
5 哈勃太空望远镜系统 5-1 5.1 支持系统模块 5-2 5.1.1 结构和机制子系统 5-2 5.1.2 仪器和通信子系统 5-7 5.1.3 数据管理子系统 5-8 5.1.4 指向控制子系统 5-10 5.1.5 电力子系统 5-14 5.1.6 热控制 5-16 5.1.7 安全(应急)系统 5-16 5.2 光学望远镜组件 5-18 5.2.1 主镜组件和球面像差 5-19 5.2.2 次镜组件 5-23 5.2.3 焦平面结构组件 5-24 5.2.4 OTA 设备部分 5-24 5.3 精细制导传感器 5-25 5.3.1 精细制导传感器组成和功能 5-25 5.3.2 铰接镜系统 5-27 5.4 太阳能电池阵列和抖动问题 5-27 5.4.1 配置 5-27 5.4.2 太阳能电池阵列子系统 5-28 5.4.3 维修任务 3A 的太阳能电池阵列配置 5-29 5.5 科学仪器控制和数据处理单元 5-29 5.5.1 组件 5-29 5.5.2 操作 5-30 5.6 空间支持设备 5-31 5.6.1 飞行支持系统 5-32 5.6.2 轨道替换单元运载器 5-33 5.6.3 机组辅助设备 5-35
MBER - web.stanford.edu
本书提供了足够的细节,让负责液体推进剂火箭各个方面的人员能够熟悉和全面地学习,包括发动机系统设计、发动机开发和飞行器应用。它应使火箭工程师能够独立地进行完整或部分发动机系统的初步详细设计,并了解和判断组成完整发动机系统的各个子系统中的活动、问题、限制和“生活事实”。它还试图教育那些最终对专门子系统和组件设计(推力室、涡轮泵、控制阀等)感兴趣的人,让他们了解自己的子系统以及邻近的子系统和完整的发动机系统。这应该使学生能够准备切合实际的分析计算和设计布局,并为子系统生产发布的最终专门设计提供长远的领先优势。