XiaoMi-AI文件搜索系统
World File Search System学位

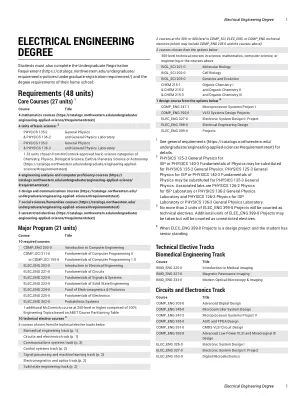
资格学位
合格学科代码 合格学科代码 航空工程 AN 计算机科学与工程 CSE 航空航天工程 AE 计算机与通信工程 CCE 农业信息学 AF 网络安全与取证 CSF 农业工程 AG 乳品工程/技术 DT 农业科学 A GS 设计与制造 DM 农业与灌溉工程 AI 地球科学/地质科学 ES 飞机维护工程 AC 电气与计算机工程 EL 应用电子与仪器 AL 电气工程 EE 应用电子工程 AP 电气与电子工程 EEE 应用力学 AM 电子仪器与控制 EO 建筑工程 AH 电子科学 EA 建筑与规划 AR 电子工程 EN 大气科学 AS 电子与通信工程 EC 汽车工程 AT 电子与仪器工程 EI 汽车设计工程 AD 电子与媒体技术 EM 航空电子工程 AV 电子与电信工程 ETE 生物化学工程 BCH 电子控制系统工程 ECS


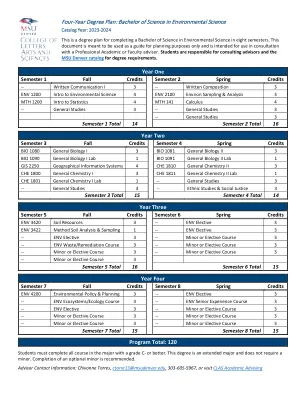
四年学位计划:环境科学理学士学位
这是一份在八个学期内完成环境科学理学士学位的学位计划。本文件仅供规划之用,供与专业学术或教职顾问协商后使用。学生有责任咨询顾问和 MSU Denver 目录以了解学位要求。

学位2003-2004.pdf
RIT 的研究生学习体验非常有针对性。RIT 研究生课程专注于所选学科的概念结构和知识组织——这种理解对于接受和引领专业技术变革至关重要。他们还为进一步学习建立了教育基础,并提供一个或多个专业领域的访问权限和流动性。这些课程本身以结合理论知识和实际应用的领域为中心,尤其是那些在市场上有明确需求的领域。论文主题通常与情境问题直接相关,而不是理论论述。不需要论文或项目的课程鼓励其他途径获得专业经验,例如可选或必修的合作教育或实习。学生通常将雇主作为研究和特殊项目的主要来源。这种应用方法吸引了重视学生解决问题能力的教师。无论需要论文、项目还是专业作品集,我们都鼓励学生将独立学习和体验式学习融入到他们的课程中。研究生还可以协助本科教育,例如在实验室。