XiaoMi-AI文件搜索系统
World File Search System学识渊博

使用无监督学习
经颅超声疗法越来越多地用于非侵入性脑疾病治疗。然而,常规数值波求机的计算量过于昂贵,无法在治疗过程中在线使用,以预测经过头骨的声学字段(例如,考虑主题特定的剂量和靶向变化)。作为实时预测的一步,在当前工作中,使用完全学习的优化器开发了2D中异质Helmholtz方程的快速迭代求解器。轻型网络体系结构基于一个修改的UNET,其中包括一个学识渊博的隐藏状态。使用基于物理的损失功能和一组理想化的音速分布对网络进行训练(完全无监督的训练(不需要真正的解决方案)。学习的优化器在测试集上表现出了出色的性能,并且能够在训练示例之外良好地概括,包括到更大的计算域,以及更复杂的源和声速分布,例如,从X射线计算的颅骨图像中得出的那些。

可解释的手性感知的图形神经网络用于药物发现中的定量结构活动关系建模
在计算机辅助药物发现中,训练定量结构的实力关系模型,以预测化学结构的生物学活性。尽管媒体图神经网络最近成功地完成了这项任务,但重要的化学信息(例如分子手性)被忽略了。为了填补这一关键差距,我们提出了用于分子表示学习的分子内核图神经网络(MOLKGNN),其中具有SE(3) - /构象不变性,手性 - 意识和解释性。对于我们的molkgnn,我们首先设计了分子图卷积,以通过比较原子的相似性与学习分子核来捕获化学图案。此外,我们传播相似得分以捕获高阶化学模式。为了评估该方法,我们对跨越众多重要药物靶标的九个精心策划的数据集进行了全面的评估,这些数据集具有现实的高级失衡,并且证明了Molkgnn在计算机辅助药物发现中比其他图神经网络的优越性。的意思是,学识渊博的内核确定了与主要知识一致的模式,从而确认了这种方法的务实解释性。我们的代码和补充材料可在https://github.com/meilerlab/molkgnn上提供。

Geocalib:通过几何优化学习单图像校准
摘要。从单个图像中,视觉提示可以帮助推断出固有和外在的摄像头参数,例如焦距和重力方向。此单图像校准可以使各种下游应用程序受益,例如图像编辑和3D映射。当前解决此问题的方法是基于带有线条和消失点的经典几何形状,或者是基于训练有素的端到端的深神经网络。学习的方法更强大,但很难概括到新的环境中,并且不如其经典同行准确。我们假设它们缺乏3D几何形状所提供的约束。在这项工作中,我们介绍了Geocalib,这是一个深层神经网络,通过优化过程利用3D几何的通用规则。GeoCalib是端对端训练的,以估算摄像机参数并学会从数据中找到有用的视觉提示。在各种基准测试中的实验表明,与现有的经典和学识渊博的方法相比,Geocalib更健壮,更准确。其内部优化估计不确定性,有助于标记故障案例并受益于下游应用程序,例如视觉定位。代码和训练有素的模型可在https://github.com/cvg/geocalib上公开获得。

自主机器人的新控制范式
摘要 - 随着人工通用智能(AGI)的出现,以令人叹为观止的速度发展,大型语言模型(LLMS)作为机器人技术中的AI代理的应用仍处于其新生阶段。一个重大的关注点是,将这些AI代理的无缝整合到机器人技术中是它们产生的内容的不可预测性,一种被称为“幻觉”的现象。从生物神经系统中汲取灵感,我们为自主机器人技术提出了一种新颖的,分层的结构,桥接AI代理智能和机器人本能。在这种情况下,我们将机器人本能定义为自主机器人系统中的先天或学识渊博的响应和优先级,以确保及时有效地进行确保生存的必要任务,例如安全保证和避免障碍。此范式和谐地将LLM的智能与机器人行为的本能相结合,有助于更安全,更广泛的自主机器人系统。作为一个案例研究,我们在移动机器人的背景下说明了这种范式,证明了它的潜力显着增强了自主机器人,并使机器人可以在各种环境之间独立和安全地运行的未来。

通过群集掩模的有效视力语言预训练
图像包含大量冗余信息,使其具有挑战性地在大规模上从它们中有效地了解它们。最近的工作通过在视觉语言构想学习期间掩盖图像贴片来解决这个问题[15,33,36,70]。一种简单的方法是随机放下大部分斑块,通过降低每个训练迭代中的计算成本和记忆使用量,从而更有效地培训训练[36]。替代策略是掩盖语义相关的贴片[15,33,70],例如属于同一对象的贴片。这迫使学习的模型预测从上下文中描述缺少场景结构的单词,从而改善了学识渊博的表示。但是,这种方法需要一种单独的机制来将语义重新贴定的补丁分组在一起,这为学习过程增加了相当大的复杂性,并且计算上很昂贵。我们提出了一种简单的掩盖策略,用于避免这些缺点的多模式对比学习。在训练期间,我们掩盖了斑块的随机簇(图1)。对于此聚类,我们将Patches的原始RGB值用作特征表示。我们的方法利用了一个事实,即视觉相似性的简单度量通常可以限制相干的视觉结构,例如对象部分[18,53],
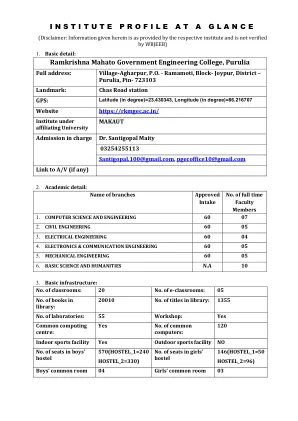
Ramkrishna Mahato政府工程学院,Purulia
6。亮点:2016年成立,Purulia(以前为Purulia政府工程学院)的Ramkrishna Mahato政府工程学院由西孟加拉邦政府完全资助,并获得了AICTE的批准。隶属于Makaut(以前称为WBUT),该学院的新生阶段包括电子和通信工程,计算机科学与工程,电气工程,土木工程工程和机械工程等五个学术部门,并配备了艺术实验室和车间。Ramkrishna Mahato政府工程学院位于距Purulia Town 20公里的Agharpur,可以夸耀大自然母亲的宁静和原始的美丽,促进了学生的不可增强学习过程。学院的泡腾教师通过组织各种学识渊博的研讨会,文化课程和和ami可亲的比赛,不断地参与学生的学术和道德改善。rkmgec是NPTEL本地分会不断鼓励学生参加在线课程,并在NPTEL的整体评估中获得了“ A”等级。该学院充满活力的学生已经采取了各种举措,例如组织献血营,编码竞赛,有关文盲,森林砍伐等各种社会问题的运动。rkmgec是整个Purulia区中唯一的同类产品,已向邻近人民提供了各种学术需求的帮助,例如免费指导他们的孩子,职业辅导,识字运动,并将其纳入各种文化和体育活动中。rkmgec是

Braintgl-计算科学系
对功能性脑网络(FBN)中的动态特征进行建模对于理解人脑的功能机制很重要。但是,目前的作品并未完全考虑人脑中潜在的复杂空间和时间相关性。为了解决这个问题,我们建议针对大脑网络的时间图表示学习框架(BraintGL)。框架涉及一个时间图池,以消除嘈杂的边缘和数据不一致,以及用于捕获时间图的时空特征的双时间图学习。已在四个数据集上的诊断/性别分类(分类任务)和亚型识别(聚类任务)中评估了所提出的方法:Human Connectome Project(HCP),自闭症脑成像数据交换(ABID),NMU-MDD和NMU-BD。为ASD诊断实现了很大的改进。具体而言,我们的模型的表现分别超过了GroupInn和ST-GCN的准确性4.2%和8.6%,与基于功能连接性特征或学识渊博的时空特征的最新方法相比,其优势与最新方法相比。结果表明,在FBN中学习建模动力学特征的时空 - 临时大脑网络表示可以改善模型在疾病诊断和亚型识别任务上的多种疾病的表现。除了性能外,计算效率和收敛速度的提高降低了培训成本。

πlight:用于资源有限的流量信号控制
深度加固学习(DRL)的最新进步显着提高了适应性交通信号控制(TSC)的性能。但是,DRL策略通常由神经网络表示,这些神经网络是过度参数化的黑框模型。因此,学识渊博的政策通常缺乏解释性,由于资源构成而无法直接部署在现实世界中的硬件中。此外,DRL方法经常表现出限制性的概括性能,努力将学习的政策推广到其他地理区域。这些因素限制了基于学习的方法的实际应用。为了解决这些问题,我们建议使用一个可以继承的可解释程序来表示控制策略。我们提出了一种新的方法,即用于交通信号控制(π-light)的可策划增强学习,旨在自主发现非差异性的程序。具体来说,我们为构建程序定义了特定域的语言(DSL)和转换规则,并利用蒙特卡洛树搜索(MCT)在离散空间中找到最佳程序。广泛的实验表明,我们的方法始终超过基本线方法。此外,与DRL相比,π灯具有优越的通用能力,从而使跨不同城市的交叉点培训和评估。最后,我们分析了学到的计划政策如何直接在资源极有限的边缘设备上删除。

文化如何改变人类进化
介绍了模仿成功及其子类型之一的概念,即模仿具有声望的人。,但声望本身就是一个复杂的社会建构。有些声望来自个人魅力,有些来自机构化。某种声望可能被一个社会中的几乎每个人都认可,而其他形式可能是高度本地的。我们不知道可能有多少不同的基于声望的选择性模仿。我们毫无疑问,文化进化是一组复杂而二的现象,尽管我们只能从目前的有利位置昏暗地想象复杂性。几乎不知道各种力量在具体的演化情况下的定量作用。在选择本书中包含的研究中,以使文化进化的过程通常被简化为示例,这些示例,例如自然选择或决策力之一,可以说是占主导地位的。通常,几种力量有可能同时影响我们选择关注的任何给定文化的演变。例如,经常朝着不同方向作用的先天,学识渊博和文化上的倾向,有可能影响某些宗教信仰或创新的频率是否会增加或减少。可以将大部分进化科学归结为估计有足够数量的大量病例中各种影响进化轨迹的强度,以获得一些经验概括。27在文化的情况下,此类研究仍然很少。28有机进化的黄金标准研究是其中的属性者在不断发展的人群中估计自然选择的强度和其他力的强度。

Wildlma:野生中的长范围内部操作
摘要 - “野外”移动操作旨在在不同的现实世界环境中部署机器人,这要求机器人具有(1)具有跨对象配置的技能; (2)能够在各种环境中进行长马任务执行; (3)在接地之外执行复杂的操作。用操纵器的四倍的机器人有望扩展工作空间并实现强大的运动,但是现有的结果并未调查这种能力。本文提出了Wildlma具有三个组成部分来解决以下问题的三个组合:(1)为支持VR的全身远程操作和遍历性,对学识渊博的低级控制器的适应; (2)Wildlma-Skill - 通过模仿学习或启发式方法获得的可推广的视觉运动技能的库以及(3)Wildlma-Planner,这是一种学习技能的界面,允许LLM Planners协调长途任务的技能。,我们通过仅使用数十种示范来实现与现有RL基准相比,实现高质量培训数据的重要性。Wildlma利用剪辑进行语言条件模仿学习,从经验上概括到在培训演示中看不见的对象。除了进行广泛的定量评估外,我们定性地展示了实用的机器人应用,例如清理大学走廊或室外地形的垃圾,操作清晰的物体以及在书架上重新安排物品。