XiaoMi-AI文件搜索系统
World File Search System它握
强迫流离失所,心理健康和儿童发展
* Kienzler,Hannian Kienzler,Colenic Costas,Close,Irant,Mushfiq,Kiridk Muridahan。 。。 (握)。 ASA 2022(一个空心和田间天数。该研究已从BRAC大学(2019-028-ER)注册。我们还要感谢BRAC教育开发学院的Erum Marium和Sakila Yesmin,以及罗兴亚难民营的BRAC野外工作者,为整个项目提供了广泛的支持和协作。该项目获得了乐高基金会和门廊基金会的干预资金,并提供了开放社会基金会提供的研究和评估资金。†发展经济与可持续性中心(CDE)和澳大利亚莫纳什大学经济学系; J-pal。电子邮件:asadul.islam@monash.edu

雷诺大师
S ADV design central hubcaps / extended vango protections • /- • /- rear foot panel o o interior: air vent surrounds and sliders, gear lever knob • • black radiator grille finisher (front end) • • body-coloured radiator grille finisher (mineral white, metallic grey and agave blue) - o cab interior trim on full fabric partition - o opening panels 180° rear panelled / glazed门• / - • /o 270°后镶板 /玻璃门O /O O /O左镶板滑动侧门 /固定窗户 /固定窗户• /o• /o右侧镶板滑动侧门 /固定窗户 /固定窗户* o /-o /o无侧门••自适应ESP(电子稳定性计划)(Hill Start Assist,扩展握把和拖车稳定辅助)••
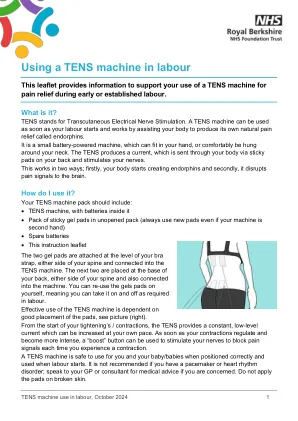
在分娩过程中使用 TENS 机器
它是什么?TENS 代表经皮神经电刺激。TENS 机器可以在分娩开始时使用,它通过帮助您的身体产生天然的止痛物质——内啡肽来发挥作用。它是一种小型电池供电机器,可以握在手中,也可以舒适地挂在脖子上。TENS 产生电流,通过背部的粘性垫传送到您的身体并刺激您的神经。它以两种方式起作用;首先,您的身体开始产生内啡肽,其次,它会干扰向大脑发送的疼痛信号。如何使用它?您的 TENS 机器包应该包括:• TENS 机器,里面有电池• 未开封包装中的粘性凝胶垫包(即使您的机器是二手的,也请始终使用新垫)• 备用电池• 本说明书

基于ROS的双机械臂协同感知抓取系统设计与实现
机器人手臂任务中的感知技术。通过分析机器人臂的运动学并设计双臂合作系统,将视觉点云技术结合起来,实现双臂合作握把,并通过使用ROS平台来验证合作社CON-TROL策略的有效性,从而构建双臂臂系统的实验平台。主要研究内容包括分析机器人ARM运动学的正和反向运动学模型,视觉点云识别在双臂合作任务中的应用,双臂合作控制策略的实现以及合作掌握的实验结果和分析。通过这项研究,成功设计和实现了基于ROS的双机器人臂合作感,并实现了双臂合作控制策略的有效性。

工具
重型 1 ⁄ 4 " 7.2 伏无绳双位置螺丝刀套件 •可调节双位置手柄允许同时作为直列和手枪式握把操作 •80 英寸/磅。的最大扭矩输出可在各种紧固应用中提供卓越的功率重量比 •变速和反向触发开关提供 0~500rpm 的紧固速度和预钻入木材、塑料和轻型金属 •工业快速释放六角柄卡盘允许快速更换螺丝刀头并防止钻头“用完” •电动制动器可提高生产率 •7.2V 电池组可延长运行时间并在一小时内充电 •重型金属铰链提供安全且持续的双位置锁定 规格: •电压:7.2V •空载速度:0~500rpm •最大。扭矩:80英寸/磅。套件包括: • 一小时充电器 • 两个 7.2V 小型电池 • 两个螺丝刀头 • 重型套件盒

口腔微生物群和阿尔茨海默氏病
摘要:本研究探讨了Tiago机器人对握把操作的配置的优化,重点是衰老。实际上,Tiago机器人可以方便地帮助残疾人,包括在国内和临床环境中有运动和认知障碍的人,可以方便地帮助残疾人。其功能包括使用立体声摄像机识别诸如面部或手势之类的视觉目标,以及通过声学传感器来解释声乐命令以执行任务。例如,机器人可以掌握和举起物体,例如一杯水,并自动导航以满足请求。本文介绍了在许多应用程序上下文中使用机器人的基础的位置和差异运动学。在当前情况下,它们用于评估机器人相对于指定姿势的运动学性能,以搜索相对于高阶不限限制的最佳配置。最终,本文提供了有关如何有效使用机器人在抓地操作中以及展示Tiago机器人的运动学模型的见解。
2024年10月12日,瓦尔纳(技术大学
1.设计和开发3D打印的握把,Damjan Pecioski,Albion Shaipi和Dejan Shishkovski(78)2。对不同形式的磨床和媒体的比较分析,包括球磨坊中的创新型,包括球磨坊中的创新型,米格雷纳·帕内瓦,米格纳·帕内瓦,彼得·帕内瓦和尼基米诺夫(Perter Paneva and Nikolay stoimery and Nikolay stoemers and 102)。通过虚拟原型,Todor Todorov,Georgi Todorov和Yavor Sofronov(171)的精确指标(171)4。使用低代数开发平台对过程驱动的应用程序进行案例研究:来自希腊公共部门的案例研究,Marios Konstantinos gialitakis,Nikias and Nikolaos and George and George and tsidege and tsegore and tsegore nousid and tsidege, (74)
钟表
• 这是 1933 年送给我的。捐赠者根本不知道它是什么。在我拥有它的 60 年里,我从未遇到过任何认出它的人。尺寸以公制计算非常准确,所以它可能是在欧洲制造的。整个东西是黑色的,一侧有淡淡的绿叶图案和代表花朵的红点。它握在手中很舒服,从底部伸出的管子与由相同材料制成的铸铁制成的底座上的孔相吻合,可以自由转动。顶部部件的底座是螺纹的,转动时,两个爪子会穿过顶部的孔并沿着侧面向下延伸约三分之一。相对的爪子可以抬起或放下,并且可以摇摆,这肯定是为了夹住一些不平整的物体。它比其他任何东西都更像现代的雕刻块。然而,它一定有大约一百年的历史了。远古时期的雕刻师通常将要雕刻的物品放在一个装满

用于预测帕金森氏病的混合模型
帕金森氏病是一种影响个人运动的中枢神经系统疾病。已经观察到帕金森氏病的患者患有手写异常,弯腰姿势,语音或语音疾病等。这项工作旨在实施能够从早期症状中预测PD的通用机器学习模型。在这项研究中,对UCI机器学习存储库和螺旋的语音数据集进行了试验,以研究组合模型的准确性。为了提高预测的准确性,从语音数据集中提取的功能是抖动,Shimmer,NHR,DFA和PPE。此外,从手写数据集提取的功能是压力,握把角,时间戳,径向速度,速度等。在上述数据集中对CNN,LSTM,Resnet等不同的机器学习模型进行了实验。从研究中可以看出,与此工作中使用的其他模型相比,具有适当的超级参数调整的CNN/LSTM模型效果很好。语音数据集上CNN/LSTM的准确性为88%,手工编写数据集为92%。。
Gun Digest 介绍 1911 - 与 Gandalfrso 咨询专业人士
Champion 配备 Novak 低架瞄准具。我们的测试手枪包括氚插入件。Champion 还配备速度保险和海狸尾握把保险。扳机压缩力为 5 磅,平稳无蠕变。抛壳口呈扇贝形,以便于管理处理和排除故障。该手枪配备一个弹匣。有哑光蓝色饰面或不锈钢结构可供选择。评估一把手枪时,有许多必要元素。卧式枪托精度是最不重要的。实际上,任何手枪都会在 7 码的距离内将每一发子弹打进一个洞中。Champion 不如大多数 5 英寸枪管的 1911 手枪精确,但它是一款快速投入使用的 4 英寸手枪,可以快速瞄准目标并具有出色的命中率。投入使用的速度和第一次射击就命中很重要。可靠性比其他任何事情都重要一百万倍。Springfield 展现了良好的做工、对细节的关注以及可靠性。