XiaoMi-AI文件搜索系统
World File Search System它握

一个摩托图像与REST数据集的低...
数据由脑电图(EEG)信号组成,该信号是通过从10位参与者(4位女性,右手,平均年龄±SD = 26.1±4.0年)中的低成本消费级设备来表达的,而没有任何以前在脑部计算机界面(BCIS)的经验的经验。BCI协议由两个条件符合,即握把手(Motor Imagery,MI)的动力学想象和静止/闲置状况。在每天的会话中,每个参与者都需要进行五次协议运行,约为1.5 h。首次运行,称为run0,将进行5个实际抓握运动的试验,以及在休息条件下的相同数量的试验。这是为了更好地解释协议,并鼓励参与者专注于执行运动的感觉。其余运行(Run1-Run4)均为识别,由每种以随机顺序呈现的条件进行20次试验。从覆盖感觉运动区域的15个电极注册了电脑活动,在SAM-

脸颊(颊)拭子DNA收集说明
注意:进食,喝或刷牙后至少1小时收集您的DNA样品。仔细按照步骤1-9:1。彻底洗手,打开包装,然后卸下塑料管。2。为了促进管盖的打开,请用一只手用塑料管握住拭子,然后用拇指按下白色帽的顶部。3。将拭子握住握把(白色盖),从塑料管中取出拭子,然后将管子放在干净的表面上。4。通过将拭子的尖端刮在脸颊内部30秒钟来收集样品。在抽样过程中,拭子末端(尖端)只能与脸颊的内部接触以减少污染。5。取样后,将拭子放回塑料管中,然后将其牢固关闭。6。将收集样品标记为照片所示的标签贴纸之一。7。重复步骤2-7,以便在交替的脸颊上的另一只拭子。8。将两个标记的拭子包裹放在提供的生物危害标本袋中。9。提供了回报包并邮寄回货。

选择委托您的孩子“生活在身体外的心”,成为他人的护理是一个家庭可以做出的最重要的选择之一
一个好的学龄前儿童将为未来学习建立重要的基础:1。建立孩子的社交技能:学校有一个计划,可以计划如何与年龄的孩子互动以及如何在学校环境中表现出来。学校应培养友谊和喜悦的社区,并帮助孩子们感受到归属感和尊严感。2。教良好习惯:如何使用材料,完成任务并接收反馈都是孩子应尽早发展的关键技能。学校工作人员应为美的护理,秩序和培养建模,并庆祝持续的学习和成长。3。为孩子们提供自由移动和快乐的空间:无论是通过节奏,舞蹈,玩耍,铅笔握把,操场或午睡,孩子的身体都应该可以自由地移动和成长,并精心准备的机会,并为大型运动技能开发(及时访问)以获得良好的食物,饮料,饮料和休息,以便他们可以成长和成长。4。建立一个强大的学术基础:从数字,信件和故事到有关历史,科学的想法以及我们在时空的想法,良好的学龄前儿童正在为未来的学习奠定基础。学校使用的语言应该是精确,积极和内容丰富的,以便孩子们可以增强对世界的词汇和奇观感。

双模式触觉反馈通过虚拟EMG控制的抓地力
摘要 - 使用肌电假体的高级肢体差异的个人缺乏进行日常生活的灵活活动所需的触觉感官信息。虽然大量研究重点是恢复这种触觉信息,但这些方法通常依赖于单模性反馈方案,这些反馈方案对于中枢神经系统采用的前馈和反馈控制策略不足。多模式反馈方法一直在几个应用领域引起人们的注意,但是,肌电假体的实用性尚不清楚。在这项研究中,我们通过脆弱的对象和可变的负载力在虚拟EMG控制的抓握和固定任务中提出了双模式触觉反馈的实用性。我们招募了n = 20名没有肢体差异的参与者,可以在四个条件下执行任务:无反馈,振动起步滑动,握把力的反馈以及双(振动 +挤压)的反馈反馈和抓地力的反馈。的结果表明,接收任何触觉反馈胜于任何触觉反馈要好,但是,双重模式反馈在防止对象破裂或掉落的方面远优于任何一种单模式反馈方法。用双模式反馈的控制也比任何一种单模式反馈方法都更加直观。

有用的Doggybot:使用腿部机器人和视觉模型
摘要 - 基于学习的方法已经实现了四足动力的强大性能。然而,一些挑战阻止了四足动物学习需要与环境和人类互动的有用室内技能:缺乏操纵的最终效果,仅使用模拟数据使用有限的语义介绍,以及在室内环境中的较低的遍历性和可及性。我们提出了一个在室内环境中进行四足动物移动操作的系统。它使用前式握把进行对象操纵,这是一种低级控制器,在模拟中培训了以egile的深度进行训练,以攀登和全身倾斜等敏捷技能,以及预先训练的视觉语言模型(VLMS),并具有第三人称Fisheye和Egentric RGB摄像头,以探索fishereye和Egincentric RGB摄像头,以进行儿子理解和指挥生成。我们在两个看不见的环境中评估了我们的系统,而没有任何现实数据收集或培训。我们的系统可以零射对这些环境并完成任务,例如遵循用户的命令在攀登女王大小的床上,成功率为60%。

电池更换
1。开关激活 - 在任一侧按和释放激活开关打开光和/或激光器。再次释放以关闭。(图5)。2。gripsense激活 - 当手在检测区内时,单元将打开(图6)。当从检测区移除手时,设备将关闭。也可以通过按下和释放任何一个激活开关来关闭灯和/或激光器。重新打开,按并释放激活开关或从握把上卸下手,然后重新握住枪支。3。要设置激活模式,请关闭单元。确保两只手都在检测区中,然后同时按并固定两个激活开关(图7),或者直到光线闪烁一次以进行刺激性激活或两次以启用Gripsense激活。4。光和激光可编程模式可轻,稳定激光,光线和脉动激光,仅稳定激光,仅搏动激光,仅光。5。要更改模式选择,请使用任何一个激活开关打开单元,然后同时按并释放两个激活开关,以转到下一个模式。重复此步骤以循环到所需模式。然后按并释放任何一个激活开关以保持所选模式。6。为了节省电源并防止无意电池排水,CenterFire®光线和激光器将在十分钟的不活动时间后自动关闭。循环激活开关以重新打开激光。

模仿从单个演示中学习的,利用载体量化机器人收获
摘要:机器人解决复杂的非重复任务的能力将是为仍涉及劳动密集型,潮流和身体苛刻活动的农业应用中新的自动化水平的关键。收获是一个这样的例子,因为它需要将动作组合在一起,通常可以将其分解为视觉宣传和操纵阶段,而后者通常直接直接进行预编程。在这项工作中,我们专注于新鲜蘑菇收获的任务,该任务由于其高复杂性而由人类采摘者手动进行。一个关键的挑战是通过低成本硬件和机械系统来启用收获,例如软握把,它们与刚性相比提出了其他挑战。我们设计了一种使用矢量量化的模仿学习模型管道来直接从视觉输入中学习量化嵌入。我们在基于人类专家收集真正蘑菇的录音设计的现实环境中测试了这种方法。我们的模型可以用柔软的气动驱动器来控制一个笛卡尔机器人,以成功复制蘑菇的超越序列。我们在不到20分钟的数据收集的干扰物中取下蘑菇,包括单个专家演示和辅助,非专家,轨迹。整个型号管道需要在单个A4000 GPU上少于40分钟的训练,并且大约需要。20 ms用于推断标准笔记本电脑GPU。

灵巧的抓紧变压器-CVF Open Access
在这项工作中,我们提出了一种新颖的歧视性框架,用于灵巧的掌握生成,称为d外部g rasp tr ansformer(dgtr),能够通过仅使用一个向前的通行方式处理对象点云来预测一组可行的抓握姿势。我们将敏捷的掌握生成作为设定的预测任务,并为其设计一个基于变压器的握把模型。但是,我们确定此设置的预测范式在灵活的掌握领域遇到了几种优化的挑战,并导致限制性能。为了解决这些问题,我们提出了培训和测试阶段的渐进策略。首先,提出了动态静态匹配训练(DSMT)策略,以增强训练阶段的光学稳定性。第二,我们使用一对对抗性损失来实现对抗平衡的测试时间适应(ABTTA),以提高测试阶段的掌握质量。dexgraspnet数据集的实验结果证明了DGTR可以预测具有高质量和多样性的灵活掌握姿势的能力。值得注意的是,在保持质量高的同时,DGTR Sigsigs所预测的Grasp的多样性明显优于先前的多个指标,而没有任何数据预处理。代码可在https://github.com/isee-laboratory/dgtr上找到。
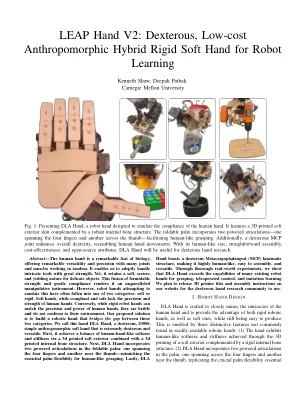
Leap Hand V2:灵巧,低成本的拟人化杂交刚性刚性软手,用于机器人学习
摘要 - 人类的手是生物学的非凡壮举,具有许多关节和肌肉的同时,具有出色的多功能性和精度。它使我们能够以极大的力量处理复杂的工具。然而,它保留了柔软,安全且屈服于精致物体的性质。强大的强度和柔和的合规性融合使其成为无与伦比的操纵仪器。但是,试图模拟这一点的机器人之手通常属于两个类别之一:软或刚性。柔软的手,虽然符合性和安全性缺乏人类手的精度和力量。相反,虽然刚性机器人的手可以与人体的精确性和力量相匹配,但它们是脆弱的,不符合其环境。我们提出的解决方案是建立一个机器人手,弥合这两个类别之间的差距。我们称此手DLA手,一种灵巧的,$ 3000,简单的拟人化软手,非常灵巧且多才多艺。首先,它通过3D打印的软外部与3D打印的内部骨结构相结合,达到了人体手状的柔软度和刚度的平衡。接下来,DLA手在可折叠的棕榈中结合了两个动力的表达:一个横跨四个手指,另一只手指靠近拇指,模仿了类似人类的握把的基本棕榈灵活性。最后,DLA

机器人操纵的对象意识到的高斯裂片
摘要 - 在3D中了解我们世界的动态对于机器人应用的性能和稳健性至关重要。尽管最近的进度已与视觉模型和体积渲染结合起来提供语义3D表示形式,但大型模型的推理时间既不是实时机器人操作的所需更新速度。在这项工作中,我们建议将“对象”注入基于3D高斯人的语义表示[1]。具有相同语义标签的高斯人可以一起初始化和更新,从而导致快速更新,以响应机器人和对象运动。所有必要的语义信息都是从验证的基础模型的第一步中提取的,从而规避了大型模型的推理瓶颈,但仍获取语义信息。只有三个相机视图,我们提出的表示形式可以实时捕获30 Hz的动态场景,这对于大多数操纵任务就足够了。通过基于我们的对象感知的高斯分裂来利用表示形式,我们能够求解语言条件的动态握把,为此,机器人抓取了开放词汇查询指定的动态移动对象。我们还使用该表示形式通过行为克隆来训练视觉运动策略,并表明该策略通过预审计的编码者获得了基于图像的策略的可比结果。视频https://object-aware-gaussian.github.io