XiaoMi-AI文件搜索系统
World File Search System安全距离
电力服务标准2025年1月
这是最重要的规则:与所有电源线的安全距离工作。职业安全与健康管理局(OSHA)要求将设备保持至少10英尺的距离0-50 kV。对于较高的电压线,所需的距离甚至更大(请参见下表)。当电源线的电压不确定时,请在350 kV和50英尺外的20英尺远的电压停留在350 kV的电压上。起重机和德里克斯必须在开始工作之前采取其他步骤(请参阅2010年11月8日生效的OSHA标准29 CFR 1926.1400)。致电1-800-375-4375致电FPL或您的本地实用程序,以在开始工作之前识别电源线的电压。在任何情况下,除了FPL以外的任何实体,fpl均可覆盖电通线。如果无法维持最低工作许可,则需要以客户为代价进行谈判。如果您目睹了违反规则的行为,请远离设备,并警告操作员远离电源线。
AD 2 - EGUB - 1 - 1 英国军事 AIP BENSON
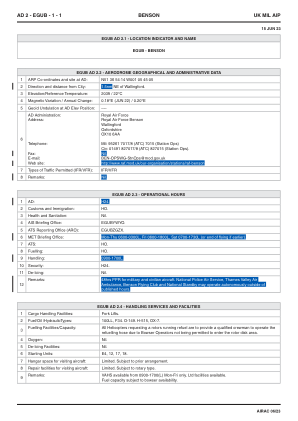
1. 旋翼飞机在 1000 英尺 QFE 以内可进行带电和无电操作。2. 不得飞越 Benson、Ewelme 和 Wallingford 村庄。3. 来访机组人员应注意,固定翼飞机的进场和停机位由不低于 600 英尺 QFE 的 Tutor/轻型固定翼飞机负责。4. 跑道西侧不得有滑行道,目前为西环路车道。5. 按照 VFR 或 IFR 进行目视进场时,尾流湍流分离的责任应由飞行员承担。小尾流湍流飞机之间的建议距离为 3 海里。为减少 RTF,同一尾流湍流类别的飞机之间将取消口头警告传输。6. Star-NG 雷达周围存在高敏感度 HIRTA(高强度无线电传输区),应避免出现这种情况。这不会影响任何英国固定翼或旋翼飞机起飞、降落或飞越任何跑道。距离雷达的安全距离为 376 米,最低安全高度为离地 357 英尺。机组人员应在安全的情况下避开 HIRTA,并在必要时与 ATC 协商,避免与其他交通发生冲突。

ATCo 对潜在冲突检测的评估 - MDPI
摘要:本文的主要目的是分析空中交通管制员 (ATCo) 发现潜在冲突的概率。ATCo 确保飞机的安全,其主要功能之一是避免碰撞。避免碰撞被称为分离规定,该术语意味着通过侧面、垂直和纵向最小分离来确保每架飞机之间的安全距离。空中交通管制员必须确保高水平的空域容量。工作绩效与对个人特征、知识、技能以及空中交通特征的高要求有关。除了分析检测潜在冲突的概率外,研究对这一安全事件影响最大的因素被认为具有特殊意义,因为 ATCo 代表空中交通管制系统的最后一个执行部门,未能检测到潜在冲突可能会导致飞机之间最小间隔距离被违反,甚至发生碰撞。为了实施这种方法,将使用具有高预测能力的贝叶斯网络。此外,还将使用基于知识和 ANSP 提供的实际操作数据的双重方法。与当前文献中包含的数据相比,这些数据是本研究的一大优势。

使用高斯潜在功能的修改后方程式开发避免障碍控制系统
摘要 - 行驶系统是自动驾驶汽车的必要系统,许多论文提出了轨迹跟踪和避免障碍物的技术。高斯潜在功能对于使用2D激光雷达避免障碍物的轨迹跟踪控制系统众所周知。缺点是它依赖于局部最小值,在某些情况下,车辆和目标正在朝着相同的方向移动,由于有吸引力的潜在领域的诱惑太高,因此车辆和目标正在朝着相同的方向移动。然后,已经引入了使用修改后的有吸引力功能避免障碍物的轨迹跟踪控制,该功能的常规吸引力功能被修改以改善导航系统。模拟是通过Carla模拟器进行的,并且使用修改功能的避免障碍物的运动在跟踪过程中的摇摆运动和横向运动过程中的安全性考虑,这是通过车辆的横向加速度来考虑的,其在模拟情况下的值比其他类型的有吸引力的功能少。同时,修改后的功能还保持了车辆和障碍物之间的安全距离差距,以免避免在障碍物范围内避免在非常接近的范围内,这可能会导致碰撞。关键字 - 三射跟踪控制系统,避免障碍物,高斯潜在功能,有吸引力的功能,Carla Simulator

施工项目员工安全手册
简介 本手册为建筑计划员工提供有关在工作环境中保护其安全和健康的信息。本手册旨在保护您和您的同事,并提高保护承包商和公众的意识。它具有运输部政策的效力,必须遵守。不可能为工作中可能出现的每种情况都采用标准和程序。良好的判断力和常识是无可替代的。本手册列出了安全和健康标准,作为养成和遵守安全工作习惯的指南;但是,在存在不寻常工作条件的情况下,可能需要采取额外的预防措施。本手册旨在灵活应对不可预见或特殊情况。这些标准不会取代或取代现有的州或联邦法规,并且可能会根据未来的经验发生变化。如有疑问,请咨询您的主管!请记住,建筑计划员工并不是在从事实际的施工活动,而是在检查承包商所进行的工作,以确保其符合要求的规格。由于施工计划员工的职责是检查,因此他们无需处于“危险”之中。尽可能与工作活动保持安全距离。施工计划员工应在安全距离等待任务完成,然后再执行需要在工作地点附近完成的检查任务。施工计划员工可以完全进入工作现场,承包商应向他们提供进行全面详细检查所需的信息和帮助;因此,如果有必要,承包商可以协助协调检查,以限制施工计划员工的风险。情境意识尽管我们计划控制风险,尽管工人经过培训且经验丰富,但错误还是会发生。了解设备的原始力量并不断观察情况以确保您不会受到伤害非常重要。为了安全起见:• 请勿在施工项目现场或通行权范围内走动时发短信或使用手机。您太分心了,无法意识到周围可能存在的危险。在安全的地方接听电话和发短信。• 很容易陷入正在进行的详细任务(例如数据收集)中。重要的是要意识到这一点,并经常考虑周围发生的事情,以确保您不会陷入危险之中,并且危险不会接近您。• 规划逃生路线 – 站在移动的车流和护栏之间会阻碍逃生路线 • 密切注意交通情况 • 将对话尽可能远离活动车道,以防车辆失控 o 车道上卡车的后视镜、负载和碎片可能会延伸到混凝土护栏和交通控制设备之外 • 了解周围环境 o 考虑您可能站立的位置与反铲铲斗的摆动半径的关系。 o 不要站在物料起重作业的下方或附近 o 操作员可能会犯错误,导致机器意外运动 • 不要走在移动设备和起重机的后面、旁边或路径上 • 与他人交流
gunslinger®Amp-Pasture-herbicide-sds- ...
闪点(PMCC):> 100°C易燃极限(LFL-UFL):未确定火和爆炸危害:此材料在水蒸发之前不会燃烧。残留物可以燃烧。灭火介质:熄灭该产品的可燃残留物,使用水雾,二氧化碳,干燥的化学物质或泡沫。消防设备:佩戴正压自牢固的呼吸器(SCBA)和保护性消防服装(包括消防头盔,外套,裤子,靴子和手套)。如果没有防护设备或不使用防护设备,请从受保护的位置或安全距离上打火。消防指示:让人们远离。隔离火和拒绝不必要的进入。使用水喷雾剂冷却裸露的容器和火灾影响区域,直到火出现,并通过重新点燃的危险。熄灭该产品的可燃残留物,使用水雾,二氧化碳,干燥的化学物质或泡沫。如果可能的话,包含火水径流。火水径流(如果不包含)可能会造成环境破坏。危险燃烧产品:在火灾条件下,该产品的某些组成部分可能会分解。烟雾可能包含未鉴定的有毒和/或刺激性化合物。燃烧产物可能包括并且不限于氮氧化物,氯化氢,一氧化碳,二氧化碳和氨。NFPA评分:健康 - 2 /易燃性 - 1 /反应性-0 < / div>
MIHP 双周更新 2024 年 11 月 18 日
• 安装 CO 探测器。探测器应安装在您家的每个楼层,包括地下室、机械室和睡眠区附近。 • 每五年更换一次探测器或按照制造商的说明更换一次。 • 每月测试探测器以确保其正常工作。 • 发电机应在离家安全距离(至少 20 英尺)的地方运行。切勿在家中、车库或窗户、门或其他封闭空间附近运行发电机。请记住,即使发电机已关闭,CO 也会积聚并持续数小时。 • 正确维护和使用燃料燃烧设备。每年请专业人员检查供暖系统、热水器和任何燃料燃烧设备。确保燃气设备通风良好。 • 如果有燃料燃烧设备,请使用 CO 探测器。露营或打猎时和/或使用帐篷、小木屋、房车和带有封闭舱室的船只时,请随身携带探测器。 • 切勿在封闭空间内开车。如果车辆在车库中行驶,车库门必须完全打开以让有害烟雾逸出。 • 仅在室外使用燃料燃烧设备。切勿在家中或任何封闭空间(包括车库)内使用汽油或丙烷加热器或木炭、煤气或木材烤架。

用户手册
- 如果电源线损坏,必须由飞利浦、其服务代理或类似合格人员更换,以避免发生危险。 - 仅将本设备连接到接地的墙壁插座。务必确保插头正确插入墙壁插座。 - 本设备不适用于通过外部定时器或单独的远程控制系统进行操作。 - 使用过程中,可触及的表面可能会变热。 - 8 岁及以上的儿童以及身体、感官或精神能力较差或缺乏经验和知识的人,如果他们在监督或指导下以安全的方式使用本设备,并了解所涉及的危险,则可以使用本设备。儿童不得玩耍本设备。除非儿童年满 8 岁且有人监督,否则他们不得进行清洁和用户维护。 - 将本设备及其电源线放在 8 岁以下儿童接触不到的地方。 - 请勿将本设备靠在墙壁或其他设备上。在设备的背面、两侧和上方至少留出 10 厘米的自由空间。请勿在设备上放置任何物品。 - 热风煎炸时,热蒸汽会通过出风口释放。请将手和脸与蒸汽和出风口保持安全距离。此外,从设备上取下锅具时,请小心热蒸汽和空气。
通过基于脑电图的人类意图预测和警觉控制来协调人机协作
在共享工作空间的人机协作场景中,人们非常希望获得的性能提升被对人类安全的高要求所抵消,机器人驱动器的速度和扭矩被限制在不会伤害人体的水平。特别是对于具有灵活人类行为的复杂任务,保持安全的工作距离和有效协调任务变得至关重要。在这方面,一种既定的方法是响应当前人体姿势的反应伺服。然而,这种方法没有利用对人类行为的预期,因此无法及时对快速的人体动作做出反应。为了尽快调整机器人的行为,尽早预测人类的意图成为一个至关重要但难以实现的因素。在这里,我们采用了一种最近开发的脑机接口 (BCI),它可以检测人类明显注意力的焦点作为即将发生的动作的预测指标。与其他类型的 BCI 相比,将刺激直接投射到工作空间有助于无缝集成到工作流程中。此外,我们还展示了如何利用大脑反应的信噪比来调整机器人运动速度以适应人类的警觉或警觉水平。通过在物理机器人实验中分析该自适应系统的性能和安全裕度,我们发现所提出的方法可以提高协作效率和安全距离。
节能自适应3D传感-CVF开放访问
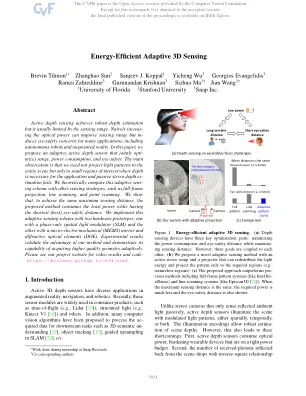
主动深度传感可实现强大的深度估计,但通常受感应范围的限制。天真地增加光学能力可以改善传感范围,但对许多应用(包括自主机器人和增强现实)的视力安全关注。在本文中,我们提出了一个自适应的主动深度传感器,该传感器可以共同介绍范围,功耗和眼部安全。主要观察结果是,我们不需要将光模式投影到整个场景,而只需要在关注的小区域中,在应用程序和被动立体声深度所需的深度失败的情况下。理论上将这种自适应感知方案与其他感应策略(例如全帧投影,线扫描和点扫描)进行了比较。我们表明,为了达到相同的最大感应距离,提出的方法在最短(最佳)眼部安全距离时会消耗最小的功率。我们用两个硬件原型实现了这种自适应感测方案,一个具有仅相位空间光调制器(SLM),另一个带有微电动机械(MEMS)镜像和衍射光学元素(DOE)。实验结果验证了我们方法的优势,并证明了其能力自适应地获得更高质量的几何形状。请参阅我们的项目网站以获取视频结果和代码: