XiaoMi-AI文件搜索系统
World File Search System定位装置

RatHat:一种可自我定位的可打印大脑植入系统
几十年来,神经科学家处理立体定位方法的方式并没有发生重大变化。在这里,我们提出了一种新的立体定位方法,它为传统的 U 型框架立体定位装置提供了一种替代方法,降低了成本、缩短了手术时间并提高了可重复性。RatHat 脑植入系统是一种 3D 打印的大鼠立体定位装置,在手术前制作并适合颅骨形状。RatHat 结构直接植入大脑,无需在手术过程中进行头部调平或坐标映射。RatHat 可以与传统的 U 型框架立体定位装置结合使用,但不需要使用微操作器即可成功植入。每个 RatHat 包含几个主要组件,包括用于安装颅内组件的植入物、用于定位钻孔位置的手术模板以及用于防止撞击和碎片损坏的保护帽。每个组件都有独特的功能,可以一起使用或单独使用。我们在四个不同的原理验证实验中证明了 RatHat 的可行性:(1) 三极套管装置、(2) 光极电极组件、(3) 固定电极阵列和 (4) 四极超速驱动器。植入成功、耐用且使用寿命长(长达九个月)。RatHat 打印文件易于创建,可在计算机辅助设计 (CAD) 软件中修改以用于各种应用,并且易于共享,有助于实现开放科学目标和复制。RatHat 已在我们的实验室中适应多种实验范式,应该是一种在啮齿动物中进行立体定位植入手术的有用新方法。
机载激光扫描在森林中的应用:最新技术
机载激光扫描 (ALS) 是一种遥感技术,基于测量从飞机发射并被地面物体反射的激光脉冲的飞行时间。过去二十年,全球定位系统、惯性导航和激光技术的进步使其快速发展。最初,飞机或卫星上的 LiDAR(光检测和测距)传感器仅在平台路径上的一维 (1D) 剖面上运行。现在,传感器配备了定位装置,能够扫描平台轨迹上的大片区域。到 20 世纪 90 年代末,小型商用传感器的脉冲重复频率约为 10 kHz [1],服务提供商才刚刚兴起。现在,领先的传感器利用多脉冲技术实现了 300 kHz 的脉冲重复频率。一些国家已经实现了完整的 LiDAR 覆盖(瑞士、丹麦),而另一些国家(芬兰、瑞典)正在进行全面测绘。
航空安全通告
I CAO 已制定了 GADSS 操作概念,并于 2017 年 6 月发布。GADSS 的发布将加强商用飞机机组人员和乘客以及 SAR 响应人员的航空安全。我们的想法是不再在海上丢失飞机,并能够找到飞机。2019 年版的 IAMSAR 手册包含适用于某些飞机的 GADSS 一般指导。第一阶段于 2018 年 1 月 1 日开始,频率为 37.5 kHz 的水下定位装置 (ULD) 连接到飞机飞行记录器;频率为 8.8 kHz 的 ULD 连接到飞机框架。第二阶段于 2018 年 11 月 8 日开始,用于飞机跟踪功能,即每 15 分钟自动报告一次位置。下一阶段将于 2021 年 1 月 1 日开始,实施自主遇险跟踪 (ADT) 功能,至少每分钟报告一次位置更新。

SAE 航空航天委员会
A-4 – 飞机仪表 A-4 大气数据工作组 AS8036 更新工作组 A-4 ED 电子显示器 A-4 EFIS 工作组 AS407 工作组 A-4 FLW 燃油流量计 A-4 HUD平视显示器 A-4 ULD 水下定位装置 A-5 航空起落架系统 A-5A 机轮、刹车和防滑控制装置 A-5B 齿轮、支柱和联轴器 A-5C 飞机轮胎 A-10 飞机氧气设备 A-20 飞机照明指导小组 A-20A 机组站照明 A-20B 外部照明 A-20C 内部照明 A-21 飞机噪音测量和噪音航空排放模型 A-22 防火和可燃性测试 AC-9 飞机环境系统 AC-9C 飞机结冰技术 AC-9M 客舱空气测量 S-7 驾驶舱和运输飞机操纵质量标准 S-9 客舱安全规定 S-9A 安全设备和救生系统 S-9B 客舱内饰和家具 飞机座椅 ACBG 机身控制轴承指导小组 ACBGPB 滑动轴承 ACBGREB 滚动元件

sae.org/standards/development/aerospace
A-4 – 飞机仪表 A-4 大气数据工作组 AS8036 更新工作组 A-4 ED 电子显示器 A-4 EFIS 工作组 AS407 工作组 A-4 FLW 燃油流量计 A-4 HUD 平视显示器 A-4 ULD 水下定位装置 A-5 航空起落架系统 A-5A 机轮、刹车和防滑控制装置 A-5B 齿轮、支柱和联轴器 A-5C 飞机轮胎 A-10 飞机氧气设备 A-20 飞机照明指导小组 A-20A 机组站照明 A-20B 外部照明 A-20C 内部照明 A-21 飞机噪音测量和噪音航空排放建模 A-22 防火和可燃性测试 AC-9 飞机环境系统 AC-9C 飞机结冰技术 AC-9M 客舱空气测量 S-7 运输飞机驾驶舱和操控质量标准S-9 客舱安全设施 S-9A 安全设备和救生系统 S-9B 客舱内饰和家具 飞机座椅 ACBG 机身控制轴承 转向组 ACBGPB 滑动轴承 ACBGREB 滚动元件
初学者补充 - 世界无线电史
O.P.变压器。脏了就存放。将所有正常 O.P.阀门与 2 -5 欧姆语音线圈匹配。特价 1/9。邮寄 9d。调谐电容器。脏了就存放。两组,.0005 mfd。已测试。每个 2/9。邮寄 6d。特价 3 个 7/ -。电线。镍铬。50 码(.014 英寸)的锡罐上的特殊运行机制和 25 码(.032 英寸)。每罐 4/6。相同尺寸的弹簧钢。每卷 1!。主变压器。初级自动绕制和抽头 0、205、225、245、300 伏,200 m /A。次级 5 伏,2 安培,6 伏,7 安培。便宜货 12/6。帖子 2/ -。望远镜天线。防风雨。延长至 7fc。6 英寸。Ex -W.D。但未使用。7/9。后 1/3。无线电图底盘。最新型号。飞轮调节,负反馈。雕刻旋钮。全部完成。三波段,频率为 (12112/0。六波段,频率为 (15 /15/0。型号也略有不同,规格相似,频率为 (IO /17¡6。托架 4/6。这些底盘上可用的术语。定位装置。未使用的 ex -W.D.单位。仍在制造商 (Truvox) 的盒子中。理想的防盗警报。铃声在 4k 伏电压下工作。价格 27/6。发布 1/9。
初学者补充 - 世界无线电史
O.P.变压器。脏了就存放。将所有正常 O.P.阀门与 2 -5 欧姆语音线圈匹配。特价 1/9。邮寄 9d。调谐电容器。脏了就存放。两组,.0005 mfd。已测试。每个 2/9。邮寄 6d。特价 3 个 7/ -。电线。镍铬。50 码(.014 英寸)的锡罐上的特殊运行机制和 25 码(.032 英寸)。每罐 4/6。相同尺寸的弹簧钢。每卷 1!。主变压器。初级自动绕制和抽头 0、205、225、245、300 伏,200 m /A。次级 5 伏,2 安培,6 伏,7 安培。便宜货 12/6。帖子 2/ -。望远镜天线。防风雨。延长至 7fc。6 英寸。Ex -W.D。但未使用。7/9。后 1/3。无线电图底盘。最新型号。飞轮调节,负反馈。雕刻旋钮。全部完成。三波段,频率为 (12112/0。六波段,频率为 (15 /15/0。型号也略有不同,规格相似,频率为 (IO /17¡6。托架 4/6。这些底盘上可用的术语。定位装置。未使用的 ex -W.D.单位。仍在制造商 (Truvox) 的盒子中。理想的防盗警报。铃声在 4k 伏电压下工作。价格 27/6。发布 1/9。

TEC-1270 - 技术信息
第 105 届海上安全委员会 (MSC 105) 会议于 2022 年 4 月 20 日至 29 日举行。由于国际海事组织最近发布了会议记录、决议和通函,下面提供了 MSC 105 上所做决定的摘要,供您参考。1.通过的强制性要求 MSC 105 通过了以下强制性要求: (1) 对 SOLAS 等的修订。由于全球海上遇险和安全系统 (GMDSS) 的现代化(见附件 1) 继最近对 GMDSS 进行现代化之后,通过了对 SOLAS II-1、III、IV 和 V 的修订草案以及附录(证书)等。此外,还批准了相关的性能标准、指南和指导。修改要点如下:i)将“A3海域”的定义由“n Inmarsat地球静止卫星”修改为“由船上配备的船舶地面站支持的公认的移动卫星业务”。ii)SOLAS公约第III/6条有关双向甚高频无线电话设备和搜救定位装置(SART)的规定已移至SOLAS公约第IV条。iii)中频(NAVTEX)和高频、船载甚高频无线电设备、船载中频和中频/高频无线电设备、Inmarsat-C船舶地面站等接收海上安全信息和搜救相关信息的性能标准进行了修改。适用日期:2024年1月1日或之后 (2) IMSBC规则修正案 IMSBC规则第6次修正案(包括新货物)已获通过。适用日期:2023年12月1日或之后
TEC- 1270 - 技术信息
第 105 届海上安全委员会 (MSC 105) 会议于 2022 年 4 月 20 日至 29 日举行。由于国际海事组织最近发布了会议记录、决议和通函,下面提供了 MSC 105 上所做决定的摘要,供您参考。1.通过的强制性要求 MSC 105 通过了以下强制性要求: (1) 对 SOLAS 等的修订。由于全球海上遇险和安全系统 (GMDSS) 的现代化(见附件 1) 继最近对 GMDSS 进行现代化之后,通过了对 SOLAS II-1、III、IV 和 V 的修订草案以及附录(证书)等。此外,还批准了相关的性能标准、指南和指导。修改要点如下:i)将“A3海域”的定义由“n Inmarsat地球静止卫星”修改为“由船上配备的船舶地面站支持的公认的移动卫星业务”。ii)SOLAS公约第III/6条有关双向甚高频无线电话设备和搜救定位装置(SART)的规定已移至SOLAS公约第IV条。iii)中频(NAVTEX)和高频、船载甚高频无线电设备、船载中频和中频/高频无线电设备、Inmarsat-C船舶地面站等接收海上安全信息和搜救相关信息的性能标准进行了修改。适用日期:2024年1月1日或之后 (2) IMSBC规则修正案 IMSBC规则第6次修正案(包括新货物)已获通过。适用日期:2023年12月1日或之后
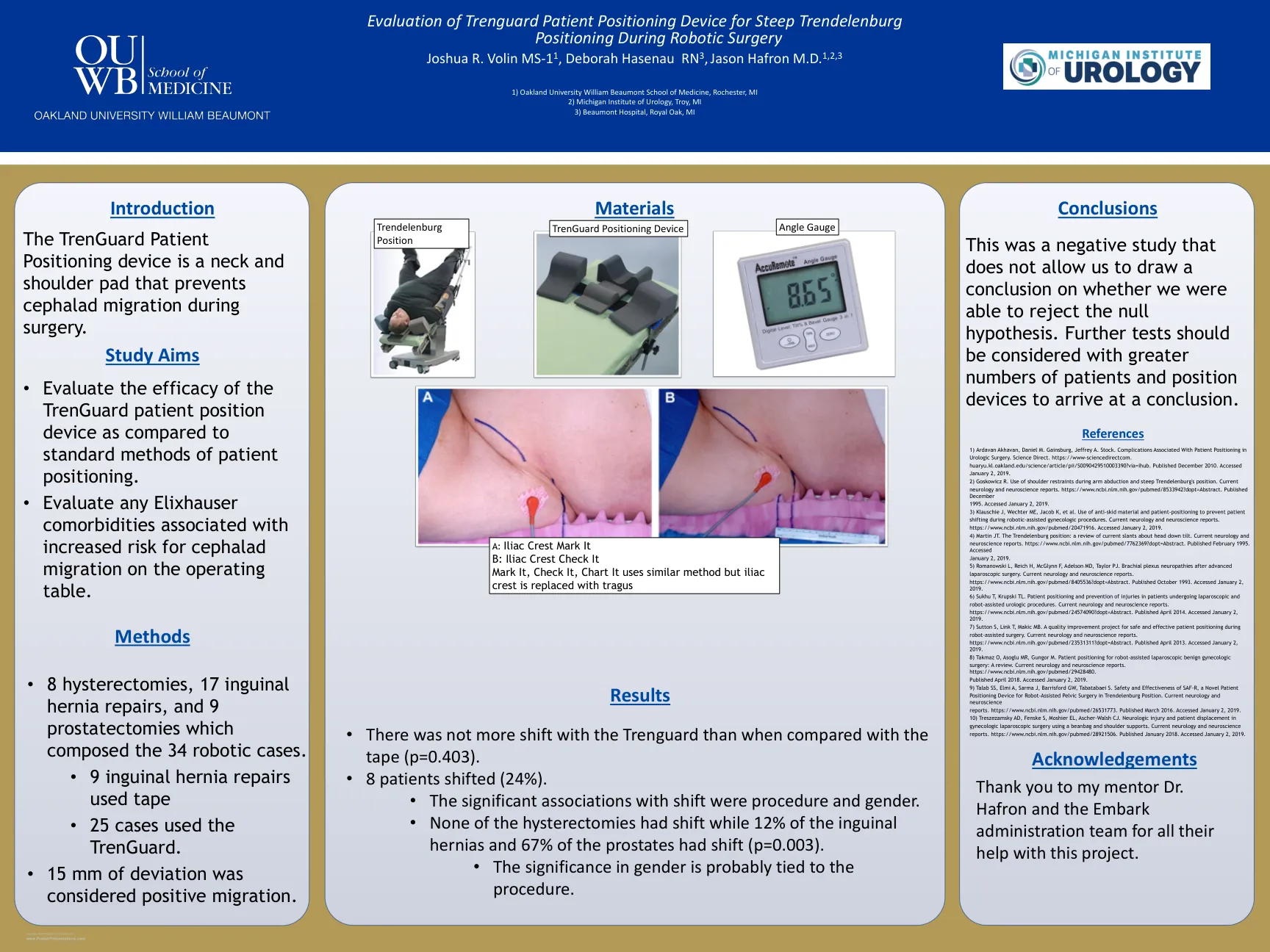
Trenguard 患者定位装置的评估...
1) Ardavan Akhavan、Daniel M. Gainsburg、Jeffrey A. Stock。泌尿外科手术中与患者体位相关的并发症。Science Direct。https://www-sciencedirectcom. huaryu.kl.oakland.edu/science/article/pii/S0090429510003390?via=ihub。2010 年 12 月出版。2019 年 1 月 2 日访问。2) Goskowicz R。手臂外展和陡峭的 Trendelenburg 体位期间肩部约束的使用。当前神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/8533942?dopt=Abstract。1995 年 12 月出版。2019 年 1 月 2 日访问。3) Klauschie J、Wechter ME、Jacob K 等人。使用防滑材料和患者定位来防止患者在机器人辅助妇科手术中移位。当前的神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/20471916。访问时间:2019 年 1 月 2 日。4) Martin JT。Trendelenburg 体位:对当前头部向下倾斜倾向的回顾。当前的神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/7762369?dopt=Abstract。1995 年 2 月出版。访问时间:2019 年 1 月 2 日。5) Romanowski L、Reich H、McGlynn F、Adelson MD、Taylor PJ。高级腹腔镜手术后的臂丛神经病变。当前的神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/8405536?dopt=Abstract。 1993 年 10 月出版。2019 年 1 月 2 日访问。6) Sukhu T、Krupski TL。接受腹腔镜和机器人辅助泌尿外科手术的患者定位和损伤预防。当前的神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/24574090?dopt=Abstract。2014 年 4 月出版。2019 年 1 月 2 日访问。7) Sutton S、Link T、Makic MB。机器人辅助手术期间安全有效的患者定位质量改进项目。当前的神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/23531311?dopt=Abstract。 2013 年 4 月出版。2019 年 1 月 2 日访问。8) Takmaz O、Asoglu MR、Gungor M。机器人辅助腹腔镜良性妇科手术的患者定位:综述。当前神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/29428480。2018 年 4 月出版。2019 年 1 月 2 日访问。9) Talab SS、Elmi A、Sarma J、Barrisford GW、Tabatabaei S。SAF-R(一种用于机器人辅助床位盆腔手术的新型患者定位装置)的安全性和有效性。当前神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/26531773。 2016 年 3 月出版。2019 年 1 月 2 日访问。10) Treszezamsky AD、Fenske S、Moshier EL、Ascher-Walsh CJ。使用豆袋和肩部支撑的妇科腹腔镜手术中的神经损伤和患者位移。当前神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/28921506。2018 年 1 月出版。2019 年 1 月 2 日访问。