XiaoMi-AI文件搜索系统
World File Search System实际操作

初级 STEM 徽章
现在您已经有了机器人原型,请创建一个演示文稿并与其他人分享您的设计。然后,了解机器人团队和比赛。 创建演示文稿来分享你如何设计机器人 告诉别人你是如何设计机器人的 了解机器人竞赛 了解机器人团队 观看机器人的实际操作 注意:与其他机器人徽章不同,这些步骤包含选项。您可以一次完成多个步骤,特别是步骤三到步骤五。获得此徽章后,您将与其他人分享您的原型和设计过程。您将看到机器人的运行情况,并了解机器人团队和比赛。

更快地发现更好的设计 - Siemens PLM
因此,海洋工业面临着一项艰巨的任务:生产比以往更多的船舶(更多船舶、更大容量),同时大幅减少对环境的影响(减少排放、提高效率)。传统的“设计-测试-建造”方法,即使用简化的势流模拟工具设计船体,并在拖曳水池中使用缩放的物理模型进行测试,其响应速度和准确性不足以实现实现长期环境目标所需的性能改进。这些方法也无法准确预测船舶在实际操作条件下的表现,例如在波涛汹涌的大海中进行自航操纵。
Typhoon - BAE 系统
在岸上拥有这些知识和能力不仅仅是国家自豪感的象征。除了重大的国家经济利益之外,它还为英国客户带来了许多切实的好处。保持这些技能可用意味着英国武装部队能够根据其特定需求定制正在开发的能力,而不是采用为其他国家军队设计的东西,并将在未来的任何升级中保持这种影响力。这意味着当雷达投入实际操作时,他们处于可能需要的任何紧急更改的队列的最前面。从大局来看,在岸上拥有这些技能可以维护英国对其采取军事行动自由的主权。
使用卫星和航空图像解释、现场验证和建模技术进行灾后建筑物损坏评估
此次地震也将成为首次在实际操作中采用技术(尤其是高分辨率图像)的地震之一。几乎从灾难一开始,高分辨率卫星图像就已可用,可以首次看到地震造成的破坏。几天后,超高分辨率航空图像可用,可以更详细地了解此次地震造成的破坏。这些宝贵的数据集使一小队遥感专家能够提供过去十年中最为准确的建筑物损坏评估之一。此外,这些信息在相对较短的时间内(地震发生后两个月内)以建筑物损坏评估报告的形式与海地政府官员共享,以支持灾后需求评估 (PDNA) 和恢复框架。

空间交通管理:...
在美国和国际上,太空中的安全行动受到很少的法规管辖。1967年的《外层空间条约》及其相关条约为在太空中运营提供了一些基本的国际结构,包括所有权和责任的定义,但实际操作结构的方式很少。2019年6月21日,联合国和平使用外太空委员会(联合国COPUO)通过了长期可持续性的序言和21个准则。2这些自愿指南代表了可以提高空间操作安全性的实践。该指南涵盖了广泛的主题,包括国家法规的重要性以及这些法规中的重要性,促进信息共享,鼓励运营安全实践(如避免碰撞)以及促进与安全有关的研究。
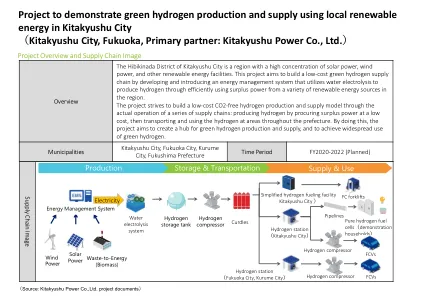
项目在Kitakyushu市使用当地可再生能源展示绿色氢生产和供应。
Kitakyushu City的Hibikinada区是一个具有高度太阳能,风能和其他可再生能源设施的地区。该项目旨在通过开发和引入一种利用水电解的能源管理系统来建立低成本的绿色氢供应链,该系统利用该地区各种可再生能源的盈余功率有效地通过有效地生产氢。该项目通过一系列供应链的实际操作来努力建立低成本的无二氧化碳生产和供应模型:通过低成本采购盈余功率,然后在整个地区的区域运输和使用氢,从而生产氢。这样做,该项目旨在创建一个用于绿色氢生产和供应的枢纽,并实现广泛使用绿色氢。
数字系统软件 - 要求指南 - NRC.gov
软件需求规范是系统开发中错误的重要来源(NUREG-0800,USNRC,1997c,第 A-7 页)。涉及软件的所有事故中,很大一部分(如果不是大多数)都可以归因于需求缺陷,例如对系统运行方式的不完整或错误假设。缺失、不准确或不完整的需求不仅会导致软件开发中的缺陷,还会阻止在验证和确认期间检测到这些缺陷。例如,功能测试基于需求;因此不会检测到缺失或不准确的需求。结构测试基于开发的代码;未说明的需求不太可能实现,因此不会被检测到。集成测试有时会检测到遗漏或不准确的信息,但更常见的是,只有通过实际操作中的故障,这些缺陷才会显现出来。
TDR 阻抗测量:信号基础...
虽然在许多情况下,最快的上升时间是理想的,但非常快的上升时间在某些情况下会在 TDR 测量中产生误导性的结果。例如,使用 35 ps 上升时间系统测试电路板上微带线的阻抗可提供出色的分辨率。但是,即使是当今使用的最高速逻辑系列也无法匹配 TDR 阶跃的 35 ps 上升时间。典型的高速逻辑系列(例如 ECL)的输出上升时间在 200 ps 到 2 ns 范围内。来自微带线中短截线或尖角等小不连续点的反射将非常明显,并且可能在 35 ps 的上升时间内产生较大的反射。在实际操作中,由具有 1 ns 上升时间的 ECL 门驱动的相同传输线可能会产生可忽略不计的反射。
铁路的基于激光痛的障碍物检测框架
摘要。铁路上的障碍物检测是一个至关重要的操作安全问题,是一项复杂的任务,涵盖了许多挑战。当机器学习(ML)算法通常用于类似的应用中,例如自动驾驶驾驶[1] [2],但由于可用数据的稀缺(尤其是图像),铁路领域面临着重大障碍,因此使常规ML方法不当。应对这一挑战,本研究提出并评估了一个使用LiDAR(光检测和范围)数据进行铁路障碍物检测的框架。该框架旨在解决图像数据稀缺性所带来的局限性,同时增强铁路环境中的操作安全性。开发的方法结合了能够在高达500米处检测障碍物的远距离激光雷达,以及火车的GPS(全球定位系统)坐标,以准确地确定其相对于检测到的障碍物的位置。使用数据融合方法处理LiDAR数据,其中有关轨道地形的预先存在的知识与聚类算法相结合,特别是DBSCAN(基于密度的基于密度的空间聚类,具有噪声的应用程序),以识别和分类在预定范围的距离处。在移动机车的范围内,特别是CP 2600-2620系列的测试,沿着Contumil-Leix基线的指定部分进行。 这些测试有助于验证实际操作条件下该方法的有效性和可行性。测试,沿着Contumil-Leix基线的指定部分进行。这些测试有助于验证实际操作条件下该方法的有效性和可行性。总体而言,LiDAR数据的利用与高级算法相结合,提出了增强铁路操作中障碍物检测能力的有前途的途径。通过克服与数据稀缺性相关的挑战,该框架有可能显着提高铁路网络内的运营安全性和效率。有必要进行进一步的研究和测试,以验证框架在各种铁路环境和运营条件下的性能。
ASAM SIM:指南
我们特别感兴趣的是,在实际操作中验证所开发的标准,并将结果反馈给 ASAM 组织。为了协调模拟领域的所有相关活动,我们成立了协调小组:模拟,该小组支持技术指导委员会和 ASAM 董事会在新领域做出即将到来的决策。目前,100 多家成员公司正在 8 个项目组中致力于 OpenX 标准的开发,并已承诺超过 20 人年的开发量。许多项目组都是国际性的,尽管受到全球新冠疫情的影响,但它们仍以惯常的方式继续致力于标准的成功。这是可能的,因为我们在疫情危机初期就创建了必要的基础设施来举行虚拟会议和交换数据。