XiaoMi-AI文件搜索系统
World File Search System平移
计算 Franck-Condon 因子
坐标 𝑖 是链接的。得到的 3N 对特征值和特征向量可以分为对应于平移运动的(其中三对)、对应于分子旋转运动的(除只有两对的线性分子外,其余均为三对)以及对应于振动自由度的。正是这 3N-6 个特征值和特征向量(对于线性分子为 3N-5 个)分别决定了分子的振动频率和简正模式。所有简正频率都不同,因此简正模式(指定三维空间中每个原子振动幅度的 3N 维向量)是线性无关的,并构成分子内部坐标的基础。如果我们只考虑分子内部坐标的 3N-6 空间,可以通过坐标变换进一步简化公式 (4)。将 𝑹 坐标系转换为“简正

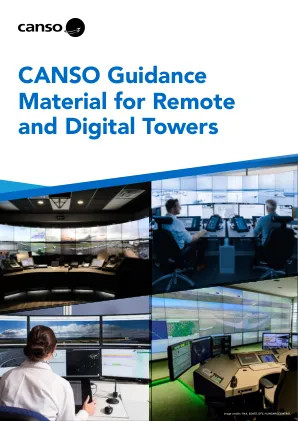
CANSO 远程和数字塔台指导材料
当两个或多个操作员从单个工作位置工作时,可能需要为每个操作员复制一些工具和数据源。可能还需要额外的程序来阐明如何共享视觉呈现和控制工具。通常,数字塔包括一个大型视觉呈现显示器,操作员可以共享一个共同的视图以提供共享的态势感知。为每个操作员提供量身定制的视觉呈现也会很有帮助。当多个操作员在一个设施内时,任何平移、倾斜或变焦摄像机(镜像双筒望远镜)或其他独立视觉功能的控制都需要复制,或者有特定的程序来管理哪些操作员对特定的视觉设备有权限。

气溶胶微型机器人的输送和驱动
然而,在液体积聚会对下面的生物膜和上皮细胞造成运输障碍的疾病中,雾化治疗的效率和效果会显著降低。[10,11] 常见的例子包括肺炎、囊性纤维化、急性支气管炎和慢性阻塞性肺病。由于 μ 机器人具有增强体内运输的潜力,因此可以用来克服液体积聚并增强治疗效果。μ 机器人通常使用微电子行业的技术制造而成 [12],可以由各种场提供动力和引导,包括磁场、[13] 声场、[14] 化学场,[15] 甚至光场。[16] 对于体内应用,μ 机器人最常见的控制方法是通过不会在组织中衰减的磁场 [17],并且已经证明了定向平移

放射科医生可以做五件事来提高他们的技术商数
• 图像存档和通信系统 (PACS) 和放射信息系统 (RIS):可靠的视图框时代已经一去不复返;如今这些技术无处不在,任何放射科医生都不可避免地要了解它们的功能。除了基本知识之外,放射科医生还需要了解报告效率,这实际上会影响放射科医生的工作效率。例如,使用高效的悬挂协议可以大大优化图像审查过程。查看器热键确保平移、缩放、窗口和滚动等常用过程只需一个操作即可完成,这也更符合人体工程学。与任何电子产品一样,PACS/RIS 系统具有许多功能,一开始花一些时间熟悉这些功能可以节省很多时间。1,2
![arxiv:2303.09043v2 [CS.CR] 2024年7月28日](/simg/1\10e68db7e92d675b8dbfeb377daf9849df6d7709.webp)
arxiv:2303.09043v2 [CS.CR] 2024年7月28日
摘要 - 时空超材料(ST-MMS)是基于时间和空间对称性的破坏以及与合成运动相关的有趣概念开放的新的光结合相互作用。在这项工作中,我们研究了具有均匀调制速度的ST-MMS的连续时空平移对称性。使用Noether定理,我们证明了这种对称性需要能量动量的保护。我们强调了能量弹药保护如何在ST-MMS内允许的光 - 含量相互作用的范围内施加限制,如电磁和调制脉冲碰撞的示例所示。此外,我们讨论了能量摩托车和相对论效应的守恒之间的相似性和差异。我们认为,我们的工作为澄清ST-MMS基本理论提供了前进的一步。

使用双树复小波 (DTCW) 和剪切波变换减少 SAR 图像的斑点噪声
摘要:合成孔径雷达 (SAR) 图像由于相干采集系统的乘性斑点噪声而难以解释。因此,SAR 图像的去斑点始终是 SAR 图像处理中的首要预处理任务。有许多方法使用各种空间域滤波器和变换域算法来减少斑点,但并非所有方法都能保留图像边缘特征。本文提出了一种通过稀疏表示的去斑点算法,该算法使用具有方向选择性和平移不变性的 Shearlet 变换和 DTCW 变换的组合。实验结果表明,所提出的方法比现有的最先进方法具有更好的 PSNR、ENL 和 EPI 值。所提出的方法不仅保留了边缘,还通过增强 SAR 图像的纹理改善了视觉效果。

腔基量子网络中的拓扑量子行走
摘要 我们提出了一种实现离散时间量子行走和模拟基于腔的量子网络中拓扑绝缘体相的协议,其中单个光子是量子行走者,采用多个腔输入输出过程来实现偏振相关的平移操作。可以通过调整单光子偏振旋转角度来模拟不同的拓扑相。我们表明,通过测量最终的光子密度分布可以直接观察到拓扑边界态和拓扑相变。此外,我们还证明了这些拓扑特征对实际缺陷具有很强的鲁棒性。我们的工作为使用基于腔的量子网络作为量子模拟器来研究离散时间量子行走和模拟凝聚态物理开辟了新的前景。