XiaoMi-AI文件搜索系统
World File Search System底座

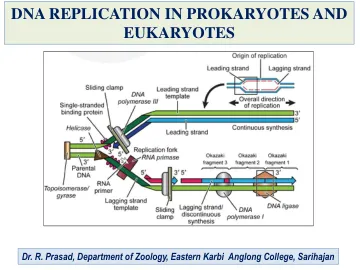
原核生物和真核生物中的DNA复制
DNA的复制始于在称为复制起源的位点放松双螺旋。在这些位点,碱基之间的氢键被损坏,并且成对底座分开。一对复制片段聚集在一起并连接非复制DNA的位置称为复制叉。在细菌染色体中,DNA复制总是从称为原点的特定位点开始。每个来源控制一个称为复制子的DNA单元的复制。细菌具有复制的单个特定起源
泰科消防产品
5 传统(不可寻址)火灾指示器面板 7 传统(不可寻址)探测器 - Tyco 614 系列 9 传统(不可寻址)探测器底座 10 传统(不可寻址)手动报警点 12 可寻址火灾指示器面板 16 MX TECHNOLOGY ® 模拟可寻址探测器 20 功能探测器底座 21 MX TECHNOLOGY 模拟可寻址模块 25 MX4428 响应器 36 模拟可寻址 130 系列探测器 38 模拟可寻址 130 系列模块 40 SIMPLEX 4100 系统概述 43 TrueAlarm IDNet 46 SIMPLEX 高级接口 47 SIMPLEX 4100 网络系统 49 TrueAlarm 可寻址探测器 51 SIMPLEX 可寻址 MAPNET II 模块 52 SIMPLEX 可寻址 MAPNET II/IDNet 模块 53 SIMPLEX 可寻址 IDNet 模块 56 探测器附件和远程指示器 58 火灾面板辅助设备 62 VIGILANT 19 英寸机架柜系列 66 线束和电缆 69 AS1668 控制器和气体控制器 71 VIGILANT 远程报警器 72 CCU 网络 75 常规船用面板 76 警告系统 77 QE90 辅助设备及备件 82 警告系统发电机 84 警告系统辅助设备 90 视听指示器 (AVI) 91 电池和电源 93 门挡和附件 95 吸气式烟雾探测器 VESDA ®

SIGE HBT晶体管选定参数的优化
过去几年已经看到了SIGE异质结双极晶体管(HBT)技术的显着进步。今天,Sige-Base HBTS的使用越来越多地在无线和高速数字通信中流行。在这些晶体管中,带隙分级产生了一个漂移场,这有助于少数载体通过基座运输。这一事实已被用来实现具有高切割频率F t(超过100 GHz)的设备。在文献[1-5]中广泛研究了SIGE HBTS中的基本运输时间的GE PROFE和BASE掺杂量的设计。三角形的ge profle在优化底座中的带隙分级有效,以最大程度地减少t b sige(基本运输时间 - f t中的主要因素)。由于已经检查了指数碱基的掺杂掺杂率和类似的基础[4,5],我们的目的是对底座中掺杂剂的高斯分布进行处理。在常规设备中,这种分布导致基本运输时间降低[6],因此估计其对SIGE HBT的影响是有用的。此外,在实际晶体管中,掺杂填充物比高斯分布更接近于指数。对SIGE HBT的两个重要参数进行了建模,即基本运输时间和当前增益。模型不仅是高掺杂效应的,而且还依赖于di usion系数的依赖性对漂移轨道和沿基数的可变GE浓度。基础中的两种类型的GE分布进行了检查:三角形的一个和框一[4,7]。
泰科消防产品
5 传统(不可寻址)火灾指示器面板 7 传统(不可寻址)探测器 - Tyco 614 系列 9 传统(不可寻址)探测器底座 10 传统(不可寻址)手动报警点 12 可寻址火灾指示器面板 16 MX TECHNOLOGY ® 模拟可寻址探测器 20 功能探测器底座 21 MX TECHNOLOGY 模拟可寻址模块 25 MX4428 响应器 36 模拟可寻址 130 系列探测器 38 模拟可寻址 130 系列模块 40 SIMPLEX 4100 系统概述 43 TrueAlarm IDNet 46 SIMPLEX 高级接口 47 SIMPLEX 4100 网络系统 49 TrueAlarm 可寻址探测器 51 SIMPLEX 可寻址 MAPNET II 模块 52 SIMPLEX 可寻址 MAPNET II/IDNet 模块53 SIMPLEX 可寻址 IDNet 模块 56 探测器附件和远程指示器 58 火灾面板辅助设备 62 VIGILANT 19 英寸机架柜系列 66 线束和电缆 69 AS1668 控制器和气体控制器 71 VIGILANT 远程报警器 72 CCU 网络 75 常规船用面板 76 警告系统 77 QE90 辅助设备及备件 82 警告系统发电机 84 警告系统辅助设备 90 视听指示器 (AVI) 91 电池和电源 93 门吸和附件 95 吸气式烟雾探测器 VESDA ®
泰科消防产品
5 传统(不可寻址)火灾指示器面板 7 传统(不可寻址)探测器 - Tyco 614 系列 9 传统(不可寻址)探测器底座 10 传统(不可寻址)手动报警点 12 可寻址火灾指示器面板 16 MX TECHNOLOGY ® 模拟可寻址探测器 20 功能探测器底座 21 MX TECHNOLOGY 模拟可寻址模块 25 MX4428 响应器 36 模拟可寻址 130 系列探测器 38 模拟可寻址 130 系列模块 40 SIMPLEX 4100 系统概述 43 TrueAlarm IDNet 46 SIMPLEX 高级接口 47 SIMPLEX 4100 网络系统 49 TrueAlarm 可寻址探测器 51 SIMPLEX 可寻址 MAPNET II 模块 52 SIMPLEX 可寻址 MAPNET II/IDNet 模块53 SIMPLEX 可寻址 IDNet 模块 56 探测器附件和远程指示器 58 火灾面板辅助设备 62 VIGILANT 19 英寸机架柜系列 66 线束和电缆 69 AS1668 控制器和气体控制器 71 VIGILANT 远程报警器 72 CCU 网络 75 常规船用面板 76 警告系统 77 QE90 辅助设备及备件 82 警告系统发电机 84 警告系统辅助设备 90 视听指示器 (AVI) 91 电池和电源 93 门吸和附件 95 吸气式烟雾探测器 VESDA ®
泰科消防产品
5 传统(不可寻址)火灾指示器面板 7 传统(不可寻址)探测器 - Tyco 614 系列 9 传统(不可寻址)探测器底座 10 传统(不可寻址)手动报警点 12 可寻址火灾指示器面板 16 MX TECHNOLOGY ® 模拟可寻址探测器 20 功能探测器底座 21 MX TECHNOLOGY 模拟可寻址模块 25 MX4428 响应器 36 模拟可寻址 130 系列探测器 38 模拟可寻址 130 系列模块 40 SIMPLEX 4100 系统概述 43 TrueAlarm IDNet 46 SIMPLEX 高级接口 47 SIMPLEX 4100 网络系统 49 TrueAlarm 可寻址探测器 51 SIMPLEX 可寻址 MAPNET II 模块 52 SIMPLEX 可寻址 MAPNET II/IDNet 模块53 SIMPLEX 可寻址 IDNet 模块 56 探测器附件和远程指示器 58 火灾面板辅助设备 62 VIGILANT 19 英寸机架柜系列 66 线束和电缆 69 AS1668 控制器和气体控制器 71 VIGILANT 远程报警器 72 CCU 网络 75 常规船用面板 76 警告系统 77 QE90 辅助设备及备件 82 警告系统发电机 84 警告系统辅助设备 90 视听指示器 (AVI) 91 电池和电源 93 门吸和附件 95 吸气式烟雾探测器 VESDA ®
泰科消防产品
5 传统(不可寻址)火灾指示器面板 7 传统(不可寻址)探测器 - Tyco 614 系列 9 传统(不可寻址)探测器底座 10 传统(不可寻址)手动报警点 12 可寻址火灾指示器面板 16 MX TECHNOLOGY ® 模拟可寻址探测器 20 功能探测器底座 21 MX TECHNOLOGY 模拟可寻址模块 25 MX4428 响应器 36 模拟可寻址 130 系列探测器 38 模拟可寻址 130 系列模块 40 SIMPLEX 4100 系统概述 43 TrueAlarm IDNet 46 SIMPLEX 高级接口 47 SIMPLEX 4100 网络系统 49 TrueAlarm 可寻址探测器 51 SIMPLEX 可寻址 MAPNET II 模块 52 SIMPLEX 可寻址 MAPNET II/IDNet 模块53 SIMPLEX 可寻址 IDNet 模块 56 探测器附件和远程指示器 58 火灾面板辅助设备 62 VIGILANT 19 英寸机架柜系列 66 线束和电缆 69 AS1668 控制器和气体控制器 71 VIGILANT 远程报警器 72 CCU 网络 75 常规船用面板 76 警告系统 77 QE90 辅助设备及备件 82 警告系统发电机 84 警告系统辅助设备 90 视听指示器 (AVI) 91 电池和电源 93 门吸和附件 95 吸气式烟雾探测器 VESDA ®
自动机器人手眼校准通过基于学习的3D Vision
抽象的手眼校准是基于视觉机器人系统的基本任务,通常配备协作机器人,尤其是对于中小型企业(中小型企业)的机器人应用。大多数手眼校准方法都取决于外部标记或人类援助。我们提出了一种新的方法,该方法可以使用机器人基础作为参考来解决手眼校准问题,从而消除了对外部校准对象或人类干预的需求。使用机器人底座的点云,从相机的坐标框架到机器人底座的转换矩阵被确定为“ i = axb”。为此,我们利用基于学习的3D检测和注册算法来估计机器人基础的位置和方向。该方法的鲁棒性和准确性是通过基于基础真实性的评估来量化的,并且将精度结果与其他基于3D视觉的校准方法进行了比较。为了评估我们的方法论的可行性,我们在不同的关节构造和实验组中使用了低成本结构化的轻扫描仪进行了实验。根据实验结果,提出的手眼校准方法达到了0.930 mm的翻译偏差,旋转偏差为0.265度。此外,3D重建实验表明旋转误差为0.994度,位置误差为1.697 mm。此外,我们的方法提供了在1秒内完成的潜力,这是与其他3D手眼校准方法相比最快的。相关代码在https://github.com/leihui6/lrbo上发布。我们根据手眼校准方法进行室内3D重建和机器人抓握实验。
LINN LP12 转盘 - 英国 Hi-Fi 历史协会
LP12 升级和维修术语指南 ................................................................ 33 悬架索环 ................................................................ 36 电机推力轴承 ................................................................ 37 轴承箱“CIRKUS” ................................................ 38 臂板 ................................................................................41 悬架弹簧 ................................................................ 41 副底盘(粘合) ................................................................ 42 底座 ................................................................................ 43 Valhalla 电源 ................................................................ 44 Nirvana 套件 ................................................................ 45 Valhalla 维修套件 ................................................................ 46 Valhalla 更新套件 ................................................................ 47 电机调节 ................................................................................ 48 Linn 速度检查器 ................................................................ 50 Kinky 臂校准工具 ................................................................ 51 T 型螺栓矫直器 ................................................................ 52 45-rpm 适配器 ................................................................ 53