XiaoMi-AI文件搜索系统
World File Search System延伸

确定铜线扩展方法的设备构建设计和参数
摘要。本文分析了在铜材料上处理牵引机上使用的伸展方法中发生的表面层的因素,以及研究的原因(研究原因)的结构,并提供了建议。在牵引力机中充分说明了为传统拉伸方法推荐的设备结构的实质,基本元素,依恋顺序和操作原理。在设备结构的工作部分的伸展过程中,提出了用于确定压缩,拉伸,伸长系数,电压和拉伸力的公式。在设备的结构中以理论上的研究为目的,在拉伸M1品牌的拉伸铜线过程中的压缩值取决于拉伸比的比率,以及技术单位对重力的锥角度的依赖性,由基于这些弹力的弹力弹性的参数来确定重力的参数,以延伸为基础,以伸展的方式伸展,以伸展的速度延伸,以伸展的速度延伸。行业使用的牵引机技术设备。以理论上的研究为目的,在拉伸M1品牌的拉伸铜线过程中的压缩值取决于拉伸比的比率,以及技术单位对重力的锥角度的依赖性,由基于这些弹力的弹力弹性的参数来确定重力的参数,以延伸为基础,以伸展的方式伸展,以伸展的速度延伸,以伸展的速度延伸。行业使用的牵引机技术设备。
2025 年马丁斯维尔市重建委员会 tif ...
总债务支付:$805,000 B.向符合条件的实体支付的教育和培训计划费用(例如,学校公司)(根据 IC 36-7-25-7):$0 C. 经济发展计划或重建计划(经修订)设想的资本支出: 额外的市中心停车场,$400,000 在 WWTP 收购额外的土地 $150,000 未来 I-69 以东的消防站 $3,000,000 延伸 I-69 以东的下水道,服务 Jordan Road $4,000,000 延伸 I-69 以东的 Hess Road 的下水道 $1,700,000 延伸供水管道至 Hospital Drive $700,000 延伸 Artesian 沿线的供水管道 $350,000 Ruth Rusie 和 Ohio 的红绿灯$250,000 Southview Drive 滑板场 $760,000 连接 Oaks 的土地 $1,500,000 体育公园土地 $3,000,000 体育公园场地及停车场 $9,500,000 市政中心 $2,900,000
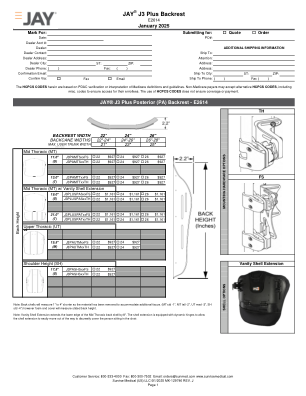
JAY J3 Plus 靠背
注意:Vanity Shell Extension 将 Mid Thoracic 后壳的下边缘延长了 8 英寸。外壳延伸件配有动态铰链,可让外壳延伸件轻松移开,从而巧妙地遮盖坐在椅子上的人。
议程-ITEM-71-2024-03-PLANNING-APPLICATIONS-MARCH- ...
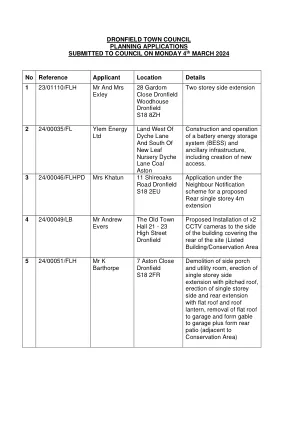
拆除侧门廊和公用事业室,竖立带有俯仰屋顶的单层侧面延伸,竖立单层侧面的侧面和后部延伸,带有平坦的屋顶和屋顶灯笼,将平坦的屋顶移至车库,并形成山墙到车库和形状形状后露台(与保护区相邻)

1. 什么是建筑能源规范?
1. 什么是建筑能源法规?能源法规为建筑物设定了最低能源要求,从而减少了建筑物使用寿命内的能源使用、能源成本和温室气体 (GHG) 排放。能源法规是建筑法规的一个子集,用于规范建筑施工,由华盛顿特区的国际法规委员会每三年发布一次。 2. 什么是延伸能源法规?延伸能源法规 (Stretch Code) 是州建筑法规的一部分,与基本能源法规相比,它为建筑能源性能设定了“高于法规”的要求。延伸能源法规的采用需要市政投票。自 2009 年以来,已有三百个社区采用了延伸能源法规,占马萨诸塞州人口的 90% 以上。 3. 最近是否有能源法规更新?2022 年 12 月,该州完成了以下三个级别的法规更新:

讲座#13 表面和石英微加工
现在,表面微加工是半导体制造技术的直接延伸。直接延伸意味着,它来自 VLSI 加工中使用的常规蚀刻。体微加工不是直接延伸,因为常规 VLSI 工艺不需要蚀刻到 300 微米、400 或 500 微米。但这里的表面微加工蚀刻范围是几微米、1 微米或 2 微米;在某些情况下也可能是 500 埃。这就是为什么他们提到这些表面微加工现象是半导体制造工艺的直接延伸,因为蚀刻深度与 VLSI 工艺大致相同。下一点是,它可以制造比体微加工小一个数量级的器件,数量级为 50 到 100 微米。这意味着,制造设备可以制造得更小,尺寸小一个数量级。原因是如果你追求更高的蚀刻,更高的蚀刻深度,那么自然就会有一些倾斜部分没有被蚀刻,就像金字塔结构一样。因此,你必须留出一定的空间,但如果你追求的是范围内非常小的蚀刻量
报告在坎帕延伸下在ICFRE森林生物多样性组织的Campa扩展下的“森林地区土壤采样方法”的报告,H
该培训计划的开头是Sc-'G'的S Pattanaik博士和Hyderabad森林生物多样性的GCR博士的欢迎地址。他热烈欢迎所有参与者。在他的讲话中,他简要介绍了该研究所的授权,愿景和各种正在进行的研究活动。他还强调说,该研究所是“ Prakriti”计划的一部分,这是一项科学家的联系计划,旨在在学童中对保护自然的认识。Pattanaik博士进一步强调了培训计划的重要性,并指出土壤是植物生长的关键因素。因此,必须通过确定植物生长必需营养的状态来评估土壤特性和质量。他解释说,土壤采样技术涉及使用标准方法为整个区域(1公顷面积)收集代表性的土壤样品。最后,帕塔奈克博士重申了培训计划在评估土壤中宏观和微养分状态的重要性,这对于植物生产力至关重要。