XiaoMi-AI文件搜索系统
World File Search System开环
CEN研讨会协议CWA 18153
3.7闭环回收可持续的概念由各个行业所包含,旨在通过重复废物材料来创建相同的产品和/或在其起源的过程中使用它们来减少环境影响。以恢复和再生材料/化合物为特征的受控回收过程可确保资源保持其最高的效用和价值。与开环回收不同的是,要回收的产品的起源和质量并不总是众所周知的,闭环回收的目的是无限期地回收而没有高质量/体积损失并最大程度地减少原始特性的降解。闭环回收不仅通过减少垃圾填埋场废物来使环境受益,而且还有助于限制与维生材料/化合物的提取/生产/生产相关的环境影响。本质上,闭环回收是希望通过循环经济实践
科学、技术与健康硕士
• 复杂机械系统描述(树状结构或闭环系统), • 闭环结构机器人的几何和运动学模型、约束方程、移动性分析、奇异性分析(树状结构和闭环系统的 DHm 约定介绍) • 全移动性和低移动性并联机器人的工作空间分析 • 几何参数的校准 • 开环和闭环机构系统的动力学原理(牛顿-欧拉、欧拉-拉格朗日、虚功原理)的回顾 • 刚性树状结构机器人的动态建模:逆和正动态问题、基本惯性参数、地面力的计算。 • 无驱动冗余和有驱动冗余的刚性并联机器人的动态建模:逆和正动态问题、基本惯性参数、地面力的计算。 • 刚性并联机器人动态模型的退化条件分析和奇异性交叉 • 动态参数的识别


对FDA批准的抗体 - 药物缀合物的见解
摘要:背景。运动图像与明显的运动相同的神经回路。因此,运动的心理彩排通常用于补充体育锻炼,并可能在中风后有助于运动神经康复。一次尝试捕获大脑参与图像的尝试涉及作为标志物的用途,用于在人类电脑电图(EEG)中发现的丘脑皮层感觉运动节律的抑郁或事件相关的对异步(ERD)。使用快速的实时处理,可以使受试者意识到自己的大脑反应,或者更好地通过称为大脑 - 计算机接口(BCI)的技术将它们转化为动作。但是,与开环训练相比,尚不清楚启用BCI的图像是否促进了更强或质量上不同的大脑反应。方法。在4.5个月的时间内参加了六个封闭式和开环运动图像经验丰富的健康志愿者,他们参加了六次实验会议,在其中,他们对先前已知的Fiffer和ARM运动进行了动力学图像,并同时进行了30次通道EEG EEG摄取。第一个和上一个会议主要由反馈试验组成,在这些反馈试验中,对受试者进行了实时的脑电图模式的分类结果;在其他会议期间,未提供反馈。在实验日和使用线性混合效应建模的反馈条件之间,比较了与图像相关的ERD模式的时空和振幅特征。结果。结论。ERD的主要空间来源在六个实验日内似乎是高度稳定的,在七个受试者中却几乎相同(Pearson'sρ> 0.94)。在一个受试者中,仅在一个受试者中,反馈和无回馈条件之间的激活空间模式在统计学上显着差异(p = 0.009)。通过BCI传递的实时视觉反馈并没有显着提高ERD强度。结果表明,通过简单的开放环设置,例如,通过家庭自我实践,可以通过良好的受试者产生MI的潜在受益。
线性二次高斯控制系统的设计...
有几种不同类型的控制方法可用于线性和非线性系统。这些控制方法需要简单到复杂的控制器。在本项目中,通过获取状态空间模型并检查不同控制方法的开环和闭环响应来分析无尾翼火箭的俯仰稳定性。此外,根据线性二次调节器 (LQR) 的响应评估了简单但强大的比例、积分、微分 (PID) 控制器的响应。由于实际应用和案例的局限性,开发了卡尔曼滤波器 (最佳估计器) 来充分观察和获取必要的状态变量。最终,将 LQG 和卡尔曼滤波器结果和增益结合起来以获得线性二次高斯 (LQG) 控制器响应。每个部分都将定义、推导和实现必要的函数到 MATLAB 和 Simulink 中以获得最佳响应。

Advancing neuroscience through real-time processing of ...
大脑充当闭环系统,该系统不断响应外部环境,并根据结果调整动作。神经科学中的传统研究方法,尤其是在大脑成像实验中使用的方法,主要采用了开环范式(Grosenick等,2015)。功能性神经回路是离线分析的,随后通过操纵特定区域内的神经元活性或遗传标志物进行了测试。通过建立闭环研究范式,可以通过时间序列实时检测和测试功能集合。这些功能合奏,而不是大脑区域或遗传标记的神经种群,是神经网络的基本单位,为神经回路的解剖提供了宝贵的见解。闭环研究范式还可以捕获内部脑动力学的高维活动,并精确地阐明了学习,决策和睡眠等生理过程。
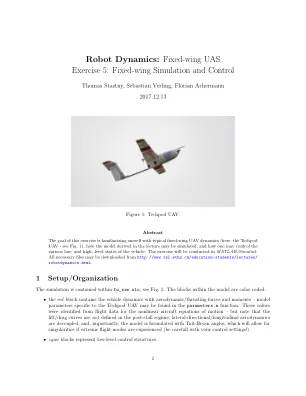
固定翼仿真与控制 - 机器人动力学
任务 2:是否可以选择一组手动控制偏差(和油门设置)来稳定机身 x 轴空速分量 u =13 m s − 1 的开环直线、水平和稳定飞行?如果可以,将控制信号(标准化)设置记录为微调,记录在初始条件向量以及低级控制块(u E 、u A 、u R )和高级控制块(u T )中。这些将作为下一步控制器设计的微调偏差。蓝色的配平用户输入块采用标准化值,即 ∈ [ − 1 , 1]。不必担心获得完美的配平 - 因为我们稍后可能会对其进行改进。进一步记录稳定状态俯仰角 θ - 将此量输入高级控制块的“θ 配平”用户输入源以及“姿态模式开关”左侧的“用户姿态设定点”块。

概念设计的全飞行包线方法...
本文介绍了一种总飞行包线方法,用于评估适合纳入概念设计阶段的飞机稳定性和控制品质。总飞行包线筛选可确保飞行器在各种飞行条件下都可调整、稳定和可控,从低速低空飞行到高速低空飞行再到高速巡航飞行。所介绍的方法有助于确定确保低风险飞行所需的前后重心限值。分析是在三架飞机上进行的,这些飞机的用途和飞行曲线截然不同。所选飞机是塞斯纳 150、波音 737-300 和洛克希德 F-117。分析包括从短周期和荷兰滚频率、MIL STD-8785C 和 Bihrle-Weissman 操纵品质以及最小可调整控制速度来观察开环操纵特性。分析显示,这些飞机有许多相似之处,也有许多不同之处,具体取决于它们的表现。
BTI 老化现象对模拟放大器影响的研究
摘要 CMOS 技术的扩展允许设计更复杂的系统,但同时也带来了一些可靠性问题。特别是,大幅扩展的微电子技术受到偏置温度不稳定性 (BTI) 老化现象的影响,这种现象导致晶体管阈值电压的绝对值随老化时间增加,从而降低微电子电路的可靠性。在本文中,我们估计了 BTI 对开环配置的运算放大器 (OPAMP) 以及基于 OPAMP 的三个卓越模拟放大器的性能下降。结果表明,BTI 会严重影响所研究电路的性能,并且这种性能下降会随着工作温度的升高而恶化。我们还简要介绍了一种可能的低成本监控方案,用于检测由 BTI 引起的 OPAMP 性能下降。我们的监控器的有效性已通过布局前电气模拟得到验证,结果表明它可以可靠地用于评估 OPAMP 的老化性能下降。
文章使用人工神经网络估计机器人的运动学和工作空间
摘要:目前,在特定而复杂的工业操作中,机器人必须满足某些要求和标准,如高运动学或动态性能、工作空间的特定尺寸或机器人移动元件尺寸的限制。为了满足这些标准,必须对机器人进行适当的设计,这需要多年的实践以及人类设计师的适当知识和经验。为了协助人类设计师进行机器人设计,已经开发了几种方法(包括优化方法)。本文解决的科学问题是开发一种人工智能方法,使用前馈神经网络来估计机器人的工作空间大小和运动学。该方法应用于由基座平台、移动平台和六个运动旋转万向球面开环组成的并联机器人。数值结果表明,通过适当的训练和拓扑结构,前馈神经网络能够根据末端执行器的姿态正确估计工作空间体积值和广义坐标值。