XiaoMi-AI文件搜索系统
World File Search System异构

用于异构多机器人系统联合仿真的可靠、低延迟同步中间件
摘要 — 最近的物联网 (IoT) 网络涵盖大量固定和机器人设备,即无人地面车辆、水面舰艇和空中无人机,以执行搜索和救援行动、野火监测、洪水/飓风影响评估等关键任务服务。由于基于物理的机器人操作系统 (ROS) 模拟器是基于时间的,而基于网络的无线模拟器是基于事件的,因此实现这些设备之间的通信同步、可靠性和最小通信抖动是模拟和系统级实现的关键挑战,此外还有部署在现实环境中的移动和异构 IoT 设备的复杂动态。然而,在将异构多机器人系统付诸实践之前,物理(机器人)和网络模拟器之间的同步是最难解决的问题之一。现有的基于 TCP/IP 通信协议的同步中间件主要依赖于机器人操作系统 1 (ROS1),由于其基于主控的架构,会消耗大量通信带宽和时间。为了解决这些问题,我们设计了一种新型的机器人与传统无线网络模拟器之间的同步中间件,该中间件依赖于新发布的具有无主数据包发现机制的实时 ROS2 架构。我们提出了一种地面和空中代理的速度感知传输控制协议 (TCP) 算法,使用数据分发服务 (DDS) 的发布-订阅传输,以最大限度地减少不同机器人代理之间的数据包丢失和同步、传输和通信抖动。我们提出的中间件与特定的机器人和网络模拟器无关,但对于模拟和实验,我们使用 Gazebo 作为基于物理的 ROS 模拟器,并使用 NS-3 作为无线网络模拟器。我们在模拟和系统层面对数据包丢失概率和平均延迟进行了广泛的网络性能评估,使用视距 (LOS)/非视距 (NLOS) 和 TCP/UDP 通信协议,通过我们提出的基于 ROS2 的同步中间件。此外,为了进行比较研究,我们进行了一项详细的消融研究,用实时无线网络模拟器 EMANE 替换 NS-3,用基于主控的 ROS1 替换无主控的 ROS2。最后,为了在实践中实现转变,我们在不同的地形上部署了一组不同的真实机器人——一架空中无人机 (Duckiedrone) 和两辆地面车辆 (TurtleBot3 Burger),形成了无主控 (ROS2) 和主控 (ROS1) 集群,以评估潜在的网络同步和抖动问题。我们提出的中间件证明了使用一组不同的固定和机器人设备构建大规模物联网基础设施的前景

在异构混合信号神经形态处理系统中实现稳健计算的脑启发方法
神经形态处理系统使用混合信号模拟/数字电子电路和/或忆阻设备实现脉冲神经网络,代表了一种有前途的技术,适用于需要低功耗、低延迟且由于缺乏连接或出于隐私考虑而无法连接到云进行离线处理的边缘计算应用。然而,这些电路通常噪声大且不精确,因为它们受设备间差异的影响,并且工作电流极小。因此,按照这种方法实现可靠的计算和高精度仍然是一个悬而未决的挑战,一方面阻碍了进展,另一方面限制了这项技术的广泛采用。从构造上讲,这些硬件处理系统具有许多生物学上合理的约束,例如参数的异质性和非负性。越来越多的证据表明,将这些约束应用于人工神经网络(包括用于人工智能的神经网络),可以提高学习的稳健性并提高其可靠性。在这里,我们深入研究神经科学,并提出网络级大脑启发策略,进一步提高这些神经形态系统的可靠性和稳健性:我们通过芯片测量来量化群体平均在多大程度上有效地减少神经反应的变化,我们通过实验证明皮质模型的神经编码策略如何允许硅神经元产生可靠的信号表示,并展示如何利用这些策略稳健地实现基本计算原语,如选择性放大、信号恢复、工作记忆和关系网络。我们认为,这些策略可以有助于指导使用噪声和不精确的计算基板(如亚阈值神经形态电路和新兴的记忆技术)实现的稳健可靠的超低功耗电子神经处理系统的设计。
![arXiv:2305.03243v1 [quant-ph] 2023 年 5 月 5 日](/simg/9\986bd571bae182b86d69ddff468792177c1a6874.webp)
arXiv:2305.03243v1 [quant-ph] 2023 年 5 月 5 日
近年来,嘈杂中型量子计算 (NISQ) 占据了新闻头条,而容错量子计算 (FTQC) 的长期愿景则具有巨大的潜力,尽管目前资源成本和量子纠错 (QEC) 开销难以解决。对于感兴趣的问题,FTQC 将需要数百万个具有长相干时间、高保真度门和紧凑尺寸的物理量子位,才能超越经典系统。正如异构专业化在经典计算中提供了扩展优势一样,它同样在 FTQC 中引起了人们的兴趣。然而,由于设计空间巨大和物理约束多变,在 FTQC 系统的硬件或软件元素中系统地使用异构性仍然是一个严峻的挑战。本文通过介绍用于设计异构量子系统的工具箱 HetArch 并使用它来探索异构设计场景,应对了使异构 FTQC 设计实用化的挑战。我们使用分层方法,将量子算法依次分解为更小的操作(类似于经典应用内核),从而大大简化了设计空间和由此产生的权衡。我们专门针对超导系统,设计由各种超导设备组成的优化异构硬件,将物理约束抽象为设计规则,使设备能够组装成针对特定操作进行优化的标准单元。最后,我们提供了一个异构设计空间探索框架,将模拟负担减少了 10 4 倍或更多
使用异构数据集的基于联邦机器学习的同步相量网络异常检测系统:预印本
摘要 — 同步相量技术广泛应用于现代能源管理系统,用于在微观层面监测电网健康状况并实时执行必要的纠正措施;然而,集成相量设备和数据聚合器面临着多种网络安全威胁。本文提出了一种基于联邦机器学习 (FML) 的异常检测系统,用于检测同步相量网络中的几种数据完整性攻击。所提出的方法集成了水平 FML 技术,由基于变电站的本地模型和基于控制中心的全局模型组成。所提出的方法包括使用包含网络和电网信息的异构数据集训练本地模型,并通过共享模型梯度通过多次迭代更新全局模型。最后,将训练好的全局模型应用于识别网络攻击、正常运行和物理事件。为了验证概念证明,我们使用密西西比州立大学和橡树岭国家实验室生成的合成数据集,利用国家可再生能源实验室的高性能计算资源来训练和测试分类模型。我们的实验结果通过多项性能指标计算得出,结果表明,所提出的方法在二分类、三分类和多分类过程中表现出一致的性能,同时确保了同步相量数据的隐私。关键词——联合机器学习、同步相量、异常检测系统、网络安全。

2.5D/3D 封装和异构集成的技术趋势 Masaya Kawano 新加坡 A*STAR 微电子研究所,kawanom@ime.a-st
除了使用有机基板封装外,为了克服尺寸限制,人们还提出了新的封装技术并将其应用于半导体产品。晶圆级封装 (WLP) 和扇出型晶圆级封装 (FOWLP) 的开发是为了通过采用晶圆工艺而不是基于层压的工艺来进一步缩小封装尺寸。对于亚微米互连,还提出了通过 Si 中介层 (TSI) 进行互连,并用于高密度 2.5D/3D 封装,其中 Cu BEOL 互连可用作再分布层 (RDL)。热压键合 (TCB) 目前用于 2.5D/3D 组装,然而,混合键合将是进一步缩小芯片连接尺寸的关键推动因素,这将在后面讨论。英飞凌于 2006 年提出了一种称为嵌入式晶圆级球栅阵列 (eWLB) 的 FOWLP [1],该技术于 2009 年转让给 STATS ChipPAC 进行批量生产。台积电开发了另一种类型的 FOWLP,称为

ARCHES 空间模拟演示任务:面向行星探测中协作科学采样的异构自主机器人团队
摘要 — 移动机器人团队将在未来探索地外天体表面的任务中发挥关键作用。在遥远、具有挑战性和未知的环境中操作时,设置基础设施和采集科学样本是一项昂贵的任务。与当前的单机器人太空任务相比,未来的异构机器人团队将通过增强的自主性和并行性来提高效率,通过功能冗余来提高稳健性,并从各个机器人的互补能力中受益。在本文中,我们介绍了我们的异构机器人团队,该团队由飞行和驾驶机器人组成,我们计划在 2021 年作为 ARCHES 项目的一部分在意大利西西里岛埃特纳火山的月球模拟地点部署科学采样演示任务。我们描述了机器人的个体能力及其在两个任务场景中的作用。然后,我们介绍其中重要任务的组件和实验:自动任务规划、高级任务控制、光谱岩石分析、基于无线电的定位、类似月球和火星场景中的协作多机器人 6D SLAM,以及自主样本返回的演示。
©2012年2023年6月的儿童心脏诊所审查...
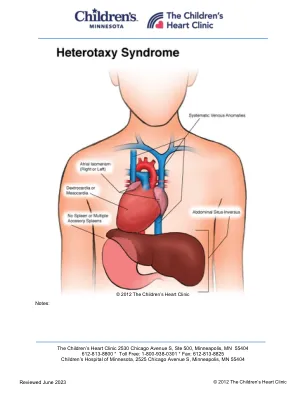
杂质(也称为心房异构主义)是指在胎儿发育过程中缺乏右侧和左侧器官的分化。尚不清楚杂质综合征的确切原因。畸形通常发生在多个器官系统中,包括心脏,肝脏,肺,肠和脾脏。在通常不对称配对的器官中,异性恋的个体具有对称性的十个角度(例如,两个右肺)。杂型被区分为右侧(右心房异构主义)或左侧(左心房异构主义)。右心房异构主义与不存在脾脏(asplenia),双侧右侧的脾脏有关(即两个右心房和两个右肺)和心血管异常通常更为严重。在两个右心房的环境中,有两个窦节点。80%的具有右心房异构体的独立物具有大动脉(TGA)的肺部降低或闭锁,导致出生后不久导致严重的cyanisis。75%的心外肺静脉回流(TAPVR)。单个心室生理学比左心房异构体更为普遍。右心房异构主义发生在1%的患有先天性心脏病的新生儿中,并且在男性中更频繁地发生。左心房异构主义与多种脾组织(多型多膜)有关,这些组织可能是或可能不起用的,左侧器官的重复(即有两个左心房和两个左肺),并以浮标延续而中断下腔静脉(IVC)。通常存在两个心室。缔合的先天性心脏病通常更为温和,例如孤立的VSD。左心房异构主义发生在不到1%的先天性心脏病儿童中,并且在雄性中更频繁地发生。杂质综合征是异常发现的星座,范围从非常轻微的和非良好的循环到非常复杂和异常的循环。异质综合征的特征是变异性的,每个患者都是独一无二的。身体检查/症状/诊断:右心房异构主义:

自适应带磨削异质结构交互策略...
摘要。为获得高质量的航空发动机叶片,将包括840D数控砂带磨床、828D机器人、Win3Ds坐标测量机和数字料仓的自适应砂带磨削方法应用于叶片的精密磨削。但各设备采集的数据不能及时有效地上传、下载,造成异构数据信息沟通不畅的问题。因此,本文提出了一种面向机载叶片自适应处理方法的异构数据交互策略。首先,在分析加工过程中异构数据集成特点的基础上,研究了基于XML的航空发动机综合数据集成的交互方法。其次,建立了磨削过程中数据的集成模型及交互机制。最后,针对典型叶片进行了交互策略的实验验证。验证结果表明,实现异构数据后,数据交互传输准确,加工叶型精度在设计范围内。
Tongsheng Geng、Marcos Amaris、Stéphane Zuckerman、Alfredo Goldman、Guang Gao 等人。一种基于配置文件的人工智能辅助异构架构动态调度方法。国际并行编程杂志,2022 年,50 (1),第 115-151 页。 10.1007/s10766-021-00721-2。hal-03606185
虽然异构架构在高性能计算系统中越来越受欢迎,但其有效性取决于调度程序将工作负载分配到合适的计算设备上的效率,以及通信和计算如何重叠。随着不同类型的资源集成到一个系统中,调度程序的复杂性也相应增加。此外,对于在不同异构资源上具有不同问题规模的应用程序,最佳调度方法可能会有所不同。因此,我们引入了一种基于配置文件的人工智能辅助动态调度方法,以动态和自适应地调整工作负载并有效利用异构资源。它结合在线调度、应用程序配置文件信息、硬件数学建模和离线机器学习估计模型,实现异构架构的自动应用设备特定调度。硬件数学模型提供粗粒度计算资源选择,而配置文件信息和离线机器学习模型估计细粒度工作负载的性能,在线调度方法动态自适应地分配工作负载。我们的调度方法在事件驱动的运行时系统中对控制规则应用程序、2D 和 3D Stencil 内核(基于 Jacobi 算法)和数据不规则应用程序稀疏矩阵向量乘法 (SpMV) 进行了测试。实验结果表明,PDAWL 的表现与产生最佳结果的 CPU 或 GPU 相当或远远优于后者。关键词:异构多核计算、工作负载平衡、自适应建模、机器学习辅助调度、并行计算

硅光子学中的异质集成
摘要:硅光子学的应用范围正在从用于数据和电信的高速收发器迅速发展到适用于许多不同市场的广泛功能,尤其是在传感和计算领域。因此,对新构建模块和增强性能的需求正在加速和多样化。在这种背景下,新材料、芯片和薄膜芯片的异构集成正变得至关重要。但要实现满足这种多样化需求的工业供应链将具有挑战性,可能需要一种新的供应链模型,在参与各方之间建立专门的标准化和测试方法。这篇评论文章讨论了硅光子学中异构集成带来的机遇和挑战,特别是未来市场增长和异构集成工艺流程的设计。