XiaoMi-AI文件搜索系统
World File Search System御准
由于Hund的耦合而引起的准本地旋转波动
很久以前就强调了自旋爆发对SR 2 RUO 4物理学的重要性[1]。该材料接近旋转密度波不稳定性和杂质的小浓度触发排序[2,3]。Sidis等人开创的非弹性中子散射(INS)实验。 [1]并在多年来进行了修复[4-10]表明,磁反应本质上是:(i)与均匀敏感性的均匀敏感贡献相关的弱动量贡献,与频带值相比,均匀敏感性的增强因子(一致)均匀敏感性的增强因子,与频带值相比[11,12])和(ii)evection [11,12])和(ii)(ii)/(ii)(ii)quemmentrate qummentrate quntimemensurate quntiment qumensurate quntiment 3,0。 3,0)[13]靠近旋转密度波(SDW)不稳定性[10]。 使用密度函数理论(DFT)和随机相近似(RPA)预测了Q SDW处的峰值。 但是,RPA并未解释宽结构,它预测在反铁磁X点Q x =(0。)处的响应 5,0。 5,0)高于 - 点响应q =(0,0,0),与实验相矛盾[10]。 最近,已经意识到,该材料中强相关性的起源可能与长波长磁相关性相关,而是与hund的耦合驱动的局部相关性[15,16]。 在此图片之后获得了SR 2 RUO 4的广泛物理特性的成功描述,并由定量的动态均值结构理论(DMFT)计算支持。Sidis等人开创的非弹性中子散射(INS)实验。[1]并在多年来进行了修复[4-10]表明,磁反应本质上是:(i)与均匀敏感性的均匀敏感贡献相关的弱动量贡献,与频带值相比,均匀敏感性的增强因子(一致)均匀敏感性的增强因子,与频带值相比[11,12])和(ii)evection [11,12])和(ii)(ii)/(ii)(ii)quemmentrate qummentrate quntimemensurate quntiment qumensurate quntiment 3,0。 3,0)[13]靠近旋转密度波(SDW)不稳定性[10]。 使用密度函数理论(DFT)和随机相近似(RPA)预测了Q SDW处的峰值。 但是,RPA并未解释宽结构,它预测在反铁磁X点Q x =(0。)处的响应 5,0。 5,0)高于 - 点响应q =(0,0,0),与实验相矛盾[10]。 最近,已经意识到,该材料中强相关性的起源可能与长波长磁相关性相关,而是与hund的耦合驱动的局部相关性[15,16]。 在此图片之后获得了SR 2 RUO 4的广泛物理特性的成功描述,并由定量的动态均值结构理论(DMFT)计算支持。3,0。3,0)[13]靠近旋转密度波(SDW)不稳定性[10]。使用密度函数理论(DFT)和随机相近似(RPA)预测了Q SDW处的峰值。但是,RPA并未解释宽结构,它预测在反铁磁X点Q x =(0。5,0。5,0)高于 - 点响应q =(0,0,0),与实验相矛盾[10]。最近,已经意识到,该材料中强相关性的起源可能与长波长磁相关性相关,而是与hund的耦合驱动的局部相关性[15,16]。在此图片之后获得了SR 2 RUO 4的广泛物理特性的成功描述,并由定量的动态均值结构理论(DMFT)计算支持。This includes the large mass enhancements of quasi- particles observed in de Haas–van Alphen experiments [ 17 ] and angle-resolved photoemission spectroscopy [ 18 ] as well as quasiparticle weights and lifetimes [ 15 ], nuclear magnetic resonance [ 15 ], optical conductivity [ 19 , 20 ], thermopower

介绍基于vep的准周期和混乱的bci
视觉诱发电位(VEP)对周期性刺激通常用于大脑计算机界面中的有利特性,例如高目标识别精度,较小的训练时间和较低的目标干扰。传统的周期性刺激会导致由于连续和高对比度刺激而导致主观的视觉疲劳。在这项研究中,我们将准周期和混乱的复杂刺激与常见的周期性刺激进行了比较,以与基于VEP的大脑计算机界面(BCIS)一起使用。规范相关分析(CCA)和相干方法用于评估三个刺激组的性能。通过视觉模拟量表(VAS)评估了由提出的刺激引起的主观疲劳。使用M2模板方法使用CCA,与Quasi-periodic(M = 78.1,SE = 2.6,P = 0.008)和周期性(M = 64.3,SE = 1.9,SE = 1.9,P = 0.0001)相比,混乱刺激的目标识别精度最高(M = 86.8,SE = 1.8)。对疲劳率的评估表明,与准周期性(p = 0.001)和周期性(p = 0.0001)刺激组相比,混乱刺激引起的疲劳较少。另外,与周期性刺激相比,准周期性刺激导致疲劳率较低(p = 0.011)。我们得出的结论是,与具有CCA的其他两个刺激组相比,混沌组的靶标识别结果更好。此外,与周期性和准周期性刺激相比,混乱的刺激导致主观视觉疲劳较少,并且可以适合设计新的舒适的基于VEP的BCIS。
庇护决策优先顺序
首相承诺通过实施一系列将改变现有庇护制度的计划,在 2023 年底前清理遗留的庇护积压问题:首相关于非法移民的声明:2022 年 12 月 13 日。这一转变旨在加快庇护决策,使所有参与庇护制度的人受益。《非法移民法》于 2023 年 3 月 7 日出台,并于 2023 年 7 月 20 日获得御准。属于该法案职责和权力范围内的申请被宣布为不予受理,不会被纳入英国庇护制度。根据本指南,被纳入英国庇护制度的申请将获得优先处理。本指南中概述的一些流程可能会在《非法移民法》开始实施后发生变化。本指南和任何其他相关指南都将更新以反映这些变化。有关决策过程的进一步指导,请参阅以下指南:
庇护决策优先顺序
首相承诺通过实施一系列将改变现有庇护制度的计划,在 2023 年底前清理遗留的庇护积压问题:首相关于非法移民的声明:2022 年 12 月 13 日。这一转变旨在加快庇护决策,使所有参与庇护制度的人受益。《非法移民法》于 2023 年 3 月 7 日出台,并于 2023 年 7 月 20 日获得御准。属于该法案职责和权力范围内的申请被宣布为不予受理,不会被纳入英国庇护制度。根据本指南,被纳入英国庇护制度的申请将获得优先处理。本指南中概述的一些流程可能会在《非法移民法》开始实施后发生变化。本指南和任何其他相关指南都将更新以反映这些变化。有关决策过程的进一步指导,请参阅以下指南:

“微小RNA(miRNA)及其转录后基因调控……”
[图 1] 中心法则概述 该图显示了中心法则,其中遗传信息从 DNA 到 RNA,然后从 RNA 到蛋白质单向传递。 DNA以碱基序列的形式存储遗传信息,mRNA(信使RNA)通过转录合成。 mRNA 由核糖体翻译,

以过程控制为中心的制造研究
1) Y. Kakinuma 等人:使用 La 掺杂 CeO 2 浆料对光学玻璃镜片进行超精密磨削,CIRP Annals,68,1 (2019) 345-348。2) S. Fujii 等人:全精密加工制造超高 Q 值晶体光学微谐振器,Optica,7,6 (2020) 694-701。3) T. Kuriya 等人:Inconel 718 定向能量沉积的凝固时间和孔隙率之间的关系先进制造技术特刊,JAMDSM,12,5 (2018) JAMDSM0104。4) M. Ueda 等人:用于快速制造的 DED(定向能量沉积)的智能工艺规划和控制,JAMDSM,14, 1 (2020) JAMSDSM0015。5) S. Sakata 等人:通过基于观察者的切削力估算避免不等齿距角平行车削中的颤动,制造科学与工程杂志 140,4 (2018) 044501。6) S. Kato 等人:利用新结构材料的节能机床的热位移和节能性能评估,日本机械工程师学会期刊,(2020 年)。 doi.org/10. 1299/transjsme.20-00002 7) K. Itoh 等人:通过 EHD 图案化开发电粘附微柱阵列,智能材料和结构,28(2019)034003。

间隙点云配准不确定性调查...
残骸重建和一般紧固件装配过程。在一项关于航空工业点云配准的研究中,孙等[6,7]利用三维点云和测量技术开发了一套拼接飞机残骸的系统。结果表明,其粗配准精度为0.6毫米,可接受的配准精度为0.2毫米。王等[8]提出了一种用于飞机点云配准的通用密度不变框架。结果表明,与其他研究[9-11]相比,他们的方法具有更好的精度(0.6毫米——1.0毫米),以均方根误差(RMSE)评估。虽然精度有所提高,但所提出的方法适用于整个扫描飞机,而不是特定的部件。徐等[12]提出了一种紧固件装配的配准方法,其中利用局部几何特征和迭代最近点(ICP)算法。该配准方法用于扫描数据和 CAD 模型之间。结果表明,与单独使用 ICP 算法相比,所提出的方法具有更好的效率。但是,所提出的注册方法的不确定性并未披露。
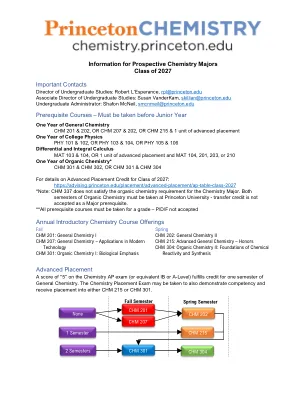
2027 届化学专业准学生信息
院系课程要求 核心课程 一个学期的本科有机化学(CHM 301 或 CHM 302 或 CHM 304) 一个学期的本科无机化学(CHM 411 或 CHM 412) 一个学期的本科物理化学(CHM 305 或 CHM 306 或 CHM 406) 一个学期的核心实验室(CHM 371 或 MSE 302 或 PHY 312 或 CBE 346) 同源课程 另外四门院系课程或同源院系的课程。课程必须是高级课程(有先修课程)且化学成分较多。MAT/PHY(200+)、CHM/MOL/MAE/CBE/GEO(300+)课程可视为同源课程。由于每年开设的课程不尽相同,因此批准名单是动态的。请咨询 DUS 以确认课程资格。

移动机器人点云配准算法综述
本综述的主题是机器人中的几何配准。配准算法将数据集关联到一个公共坐标系中。它们已广泛应用于物体重建、检查、医疗应用和移动机器人定位。我们专注于需要配准点云的移动机器人应用。虽然这些算法的基本原理很简单,但已经针对许多不同的应用提出了许多变体。在这篇综述中,我们从历史的角度介绍了配准问题,并表明可以根据一些元素来组织和区分大量的解决方案。因此,我们提出了几何配准的形式化,并将文献中提出的算法投射到该框架中。最后,我们回顾了该框架在移动机器人中的一些应用,这些应用涵盖了不同类型的平台、环境和任务。这些示例使我们能够研究每个用例的具体要求以及导致配准实施的必要配置选择。最终,本评论的目的是为几何配准配置的选择提供指导。