XiaoMi-AI文件搜索系统
World File Search System微分
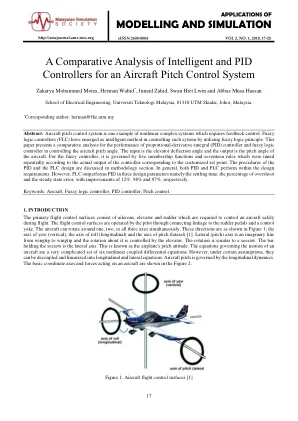
智能控制器与 PID 控制器的比较分析...
摘要:飞机俯仰控制系统是需要反馈控制的非线性复杂系统之一。模糊逻辑控制器 (FLC) 是一种利用模糊逻辑原理控制此类系统的智能方法。本文对比例-微分-积分 (PID) 控制器和模糊逻辑控制器在控制飞机俯仰角方面的性能进行了比较分析。输入是升降舵偏转角,输出是飞机的俯仰角。对于模糊控制器,它由五个成员函数和十七条规则控制,这些规则根据与定制设定点相对应的控制器实际输出反复调整。方法论部分讨论了 PID 和 FLC 的设计程序。一般来说,PID 和 FLC 都符合设计要求。然而,FLC 在三个设计参数方面优于 PID,即稳定时间、超调百分比和稳态误差,分别提高了 12%、98% 和 97%。

凝聚态系统中低能中微子散射的中微子磁矩
摘要。已知低能转移状态下的弹性中微子对电子和原子核的散射截面对中微子的电磁特性非常敏感。特别是,可以使用能量阈值非常低的液体或固体探测器有效地搜索中微子的磁矩。我们提出了一种将中微子磁矩贡献纳入凝聚态靶低能弹性中微子散射理论处理的形式。采用动态结构因子的概念来描述靶中的集体效应。用数字方法计算了超流体 4He 上氚反中微子散射的微分截面。我们发现 10 − 11 µ B 量级的中微子磁矩对截面有很强的影响。我们的结果可用于未来在液体或固体目标的低能中微子散射实验中寻找中微子磁矩。

控制量子干扰频率梳子 - Strathprints
在量子干扰的模型中发现了两个可见的颞腔孤子的分支,在微分分散体中具有三级培养基的微孔干扰器中。孔孤子是由于移动域壁的锁定。我们在空腔谐振的相对侧识别两个不同的麦克斯韦点,其中域壁是固定壁和两个不同的颞腔孤子子,一个狭窄且具有较高的峰强度,另一个较高的峰强度,并且具有较低的峰强度,在宽参数范围内并存,而无需二级空腔共振。将两个孤子分支结合在数十个腔圆旅程的时间尺度上的局部结构。通过不同类型的多稳态腔孢子的组合生成的频率梳会导致增强的带宽及其对照。

Joseph M. Landsberg Owen 数学教授 德克萨斯 A&M 大学数学系 Mailstop 3368,College Station,TX 77843-3368 http://www.
其他资助:美国国家科学基金会资助德克萨斯几何和拓扑学会议 DMS-1812040(与 D. Baskin 和 I. Zelenko 合作)90,000 美元(5/18 - 5/21)美国国家科学基金会资助德克萨斯几何和拓扑学会议 DMS-1510060(与 J.Pitts 合作)(4/15 - 4/18)美国国家科学基金会资助外微分系统新方向:纪念 Robert Bryant 60 岁生日的会议 DMS-1321212(与 J. Clelland 和 C. Robles 合作)(2/13 - 2/14)美国国家科学基金会资助德克萨斯几何和拓扑学会议 DMS-1203131(与 J.Pitts 合作)(4/12 - 4/15)美国国家科学基金会资助德克萨斯代数几何研讨会 DMS-1203175(与 L. Matusevich、JM Rojas、P. Lima-Filho 和 F. Sottile) (4/12 - 4/13) 数学与应用研究所 (IMA) 会议资助,用于 TAMU 的几何应用研讨会 (4/12) 美国国家科学基金会资助,用于德克萨斯几何和拓扑会议 DMS-0904481 (与 J.Pitts) (4/09 - 4/12) 美国国家科学基金会资助,用于德克萨斯代数几何研讨会 DMS-0915235 (与 M. Rojas、P. Lima-Filho、F. Sottile、L. Matusevich) (4/09 - 4/12) 美国国家科学基金会资助,用于德克萨斯几何和拓扑会议 DMS-0605082 (与 J.Pitts) (4/06 - 4/09) 佐治亚理工学院 VIGRE 资助 (5 名 PI 之一) (2002-2007)。教学经验。在美国和法国教授各级课程,从本科一年级到高级研究生课程。德克萨斯 A&M 研究生课程开发:设计量子计算/量子信息理论研究生课程,重新设计研究生微分几何序列和代数几何 I 课程,开设代数几何 II 课程,共同开设表示理论课程。在费城学校发起补充数学课程,以激发对数学的兴趣(由费城行政服务团的一小笔拨款资助),通过在初中和高中进行数学演讲(91-94)。LSAMP 导师 - 针对第一代大学生的计划(2017-18,2018 年后停止)。

光子科学与工程 2024-2025
OSE3043 光学分析方法 (3) PR: MAC 2313 OSE4721 生物光子学 (3) PR:OSE 3052 OSE4240 简介光学设计 (3) PR:OSE 3052, OSE 3200 OSE 4953 高级设计双专业 ECE (1) 3 EEE 3342C 数字系统 (3) EEL 3470 EM 领域 (3) EGN 4931H 工程荣誉研讨会-研究 (3) EMA 4413 电子材料基础 (3) MAP 4303 常微分方程 II (3) MAP 4341 偏微分方程 (3) MAP 4371 微分数值方法等式(3) MAS 3105 矩阵与线性代数 (4) PR: MAC 2312 OSE 4912 指导独立研究 (1) OSE 4903H 荣誉指导阅读 (3) OSE 4970H 荣誉论文 (3) PHY 3650 量子信息处理 (3) PHY 4604 波动力学 I (3) PHY 4605 波动力学 II (3) PHZ 3113 理论方法简介 (3)
传感器 - 语义学者
摘要:由于四旋翼飞行器具有欠驱动、强耦合等特点,传统的轨迹跟踪方法控制精度低,抗干扰能力差。针对四旋翼无人机,设计了一种新的模糊比例-交互式微分(PID)型迭代学习控制(ILC)。该控制方法将PID-ILC控制与模糊控制相结合,继承了ILC控制对干扰和系统模型不确定性的鲁棒性。针对单纯的ILC控制容易受到外界干扰而产生抖动的问题,提出了一种基于PID-ILC算法的新型控制律。采用模糊控制对三个学习增益矩阵的PID参数进行设置,以抑制不确定因素对系统的影响,提高控制精度。利用Lyapunov稳定性理论验证了新设计的系统稳定性。Gazebo仿真表明,所提出的设计方法为四旋翼飞行器设计了有效的ILC控制器。

通过特定队列模板改善受损大脑的正常化
图 1 病变患者 ANTs_cohort 流程第 1 步概览。 (a) 对于标准化,我们研究了两种不同的方法,要么 (1) 将病变大脑直接标准化为 MNI-152 模板,要么 (2) 构建一个代表所研究对象的模板 (队列特定模板/CST),并将病变大脑标准化为模板 (ANTs_cohort)。 (b) 对于后者,使用中风患者的 T1 加权图像以迭代方式构建 CST。 平均图像可用作初始估计值。 在每次迭代中,使用 SyN 微分同胚变换 T i 将原始图像扭曲到 CST。 然后将这些变换的平均值应用于上一步的模板以构建新模板。 重复此过程直至收敛。 通过这种方式,CST 为所考虑的受试者提供了代表性形态——也就是说,它与所有图像“等距”。第二步,使用约束成本函数掩蔽将原始图像归一化为 CST(参见正文)

使用计算机视觉和机器学习分析小鼠的超声波发声
摘要 小鼠发出超声波发声 (USV),传达与社会相关的信息。为了检测和分类这些 USV,我们在此描述了 VocalMat。VocalMat 是一款使用图像处理和微分几何方法检测音频文件中的 USV 的软件,无需用户定义参数。VocalMat 还使用计算视觉和机器学习方法将 USV 分为不同的类别。在小鼠发出的 >4000 个 USV 数据集中,VocalMat 检测到了 98% 以上的手动标记 USV,并准确地将 11 个 USV 类别中的 »86% 的 USV 分类为 USV。然后,我们使用降维工具分析了不同实验组之间 USV 分类的概率分布,从而提供了一种量化和定性小鼠发声库的稳健方法。因此,VocalMat 无需用户输入即可自动、准确和定量地分析 USV,为详细和高通量地分析这种行为提供了机会。
气动弹性运载火箭的晃动观测器设计
本文重点介绍滑模观测器的设计,以估计晃动质量的位置和速度状态。这些状态随后用作姿态控制器的反馈信号。简单的比例微分 (PD) 刚体控制器无法安全地执行姿态命令,否则会遇到稳定性问题,即使在稳定状态下,非零晃动质量位置也会导致旋转角度抖动。通过晃动状态反馈,即使是非最优 PD 控制器也会在有限的执行器活动下表现出平滑的响应。然而,观测器的晃动模型参数的轻微不确定性会对控制器性能产生负面影响,从而增加液体的振幅和振荡行为。需要额外的观测器来估计正确的参数值。更强大的增量非线性动态逆控制器可以改善控制器响应,但需要进一步开发,例如,在反馈回路中加入陷波滤波器。

计划、参加、生成:规划序列到...
我们研究了使用注意力机制将规划机制集成到序列到序列模型中。我们开发了一个模型,该模型可以在计算输入和输出序列之间的对齐时提前规划未来,构建一个拟议未来对齐矩阵和一个承诺向量,该承诺向量决定是否遵循或重新计算计划。该机制的灵感来自最近提出的强化学习战略性专注读者和作家 (STRAW) 模型。我们提出的模型是端到端可训练的,主要使用可微分操作。我们表明,它在 WMT'15 的字符级翻译任务、查找图的欧拉电路的算法任务以及从文本生成问题方面的表现优于强大的基线。我们的分析表明,该模型计算出定性的直观对齐,比基线收敛得更快,并且以更少的参数实现了卓越的性能。