XiaoMi-AI文件搜索系统
World File Search System感知深度
情境感知深度强化学习... - arXiv
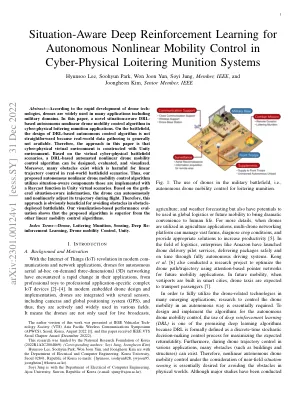
摘要 —随着无人机技术的快速发展,无人机被广泛应用于包括军事领域在内的许多应用领域。本文提出了一种新型的基于情境感知 DRL 的自主非线性无人机机动性控制算法,应用于网络物理巡飞弹药。在战场上,基于 DRL 的自主控制算法的设计并不简单,因为通常无法收集现实世界的数据。因此,本文的方法是利用 Unity 环境构建网络物理虚拟环境。基于虚拟网络物理战场场景,可以设计、评估和可视化基于 DRL 的自动非线性无人机机动性控制算法。此外,在现实战场场景中,存在许多不利于线性轨迹控制的障碍物。因此,我们提出的自主非线性无人机机动性控制算法利用了情境感知组件,这些组件是在 Unity 虚拟场景中使用 Raycast 函数实现的。基于收集到的态势感知信息,无人机可以在飞行过程中自主且非线性地调整其轨迹。因此,这种方法显然有利于在布满障碍物的战场上避开障碍物。我们基于可视化的性能评估表明,所提出的算法优于其他线性移动控制算法。
HPC+AI 助力 X 射线科学
Yao, Y.、Chan, H.、Sankaranarayanan, S.、Balaprakash, P.、Harder, RJ 和 Cherukara, MJ (2022)。AutoPhaseNN:3D 纳米级布拉格相干衍射成像的无监督物理感知深度学习。npj 计算材料,8(1),1-8。

具有成本效益的主动激光扫描系统,用于深度感知深度学习的实例分段
摘要:家禽业在全球农业中起关键作用,家禽是蛋白质的主要来源,并为经济增长做出了重大贡献。但是,该行业面临着与重复性且苛刻的劳动密集型任务相关的挑战。自动化已成为提高运营效率并提高工作条件的关键解决方案。具体来说,机器人的操纵和对象的处理在工厂中变得无处不在。但是,存在挑战以预先识别和引导机器人处理一堆具有相似纹理和颜色的物体。本文着重于开发旨在自动化鸡的机器人解决方案的视觉系统,该机器人解决过程是一种基本的,但在家禽加工中是一种基本但身体上剧烈的活动。为了解决通用实例分割模型在识别重叠对象中的限制,开发了一种具有成本效益的双重活性激光扫描系统来生成对象上的精确深度数据。将经过良好的深度数据生成与RGB图像集成在一起,并将其发送到实例分割模型以进行单个鸡检测和识别。这种增强的方法显着改善了该模型在处理涉及重叠鸡的复杂场景中的性能。具体而言,RGB-D数据的集成将模型的平均平均精度(MAP)检测准确性提高了4.9%,并显着改善了中心偏移 - 本研究中引入的定制度量标准,以量化地面真相蒙版中心与预测的面具中心之间的距离。精确的中心检测对于开发未来的机器人控制解决方案至关重要,因为它可以确保在鸡肉重定过程中准确抓住。中心偏移量从22.09像素(7.30 mm)降低到8.09像素(2.65 mm),证明了该方法在缓解闭塞挑战和增强视觉系统的可靠性方面的有效性。

学年的特殊主题课程列表2024-2025感知深度学习(2.0 cr。)2024秋季术语本课程公开了学生
学年的特殊主题课程列表2024-2025感知深度学习(2.0 cr。)2024秋季术语本课程使学生接触到应用于图像的深度学习的数学基础。最先进的机器人中的感知堆栈正在迅速适应深度学习的最新进步,因为它们的功效和高精度。这些基于深度学习的方法也可以使用并行的硬件(例如GPU)加速,这些硬件可以实现复杂任务(例如实时场景分割)的低延迟操作。在机器人感知的背景下,将对学生进行培训,以制定,开发和实施深度学习解决方案,以解决常见的计算机视觉问题。该课程将涵盖高级和最先进的主题,例如SIM2REAL,对神经网络,视觉变压器和扩散模型的对抗性攻击。本课程中探讨的其他主题包括图像形成,线性分类器,神经网络和反向流体,卷积神经网络(CNN),CNN体系结构,SIM2REAL,黑色和白色盒子攻击的数据生成,用于对神经网络的构建,以构建用于构建现有的艺术机器人的Art机器人堆栈。学生将了解具有最先进的深度学习工具包的机器人系统所需的考虑因素。该课程旨在平衡理论与项目的应用。推荐背景:精通编程,最好是Python,MA 1024,MA 2071/20772,MA 2621/2631机器人进行回收(2.0 cr。)2024秋季B期限介入机器人技术和AI技术的最前沿,以应对全球浪费危机。本课程基于基础机器人知识,以应对可持续废物管理中的现实世界挑战。它提供了一个了解机器人操作和机器人视觉系统的机会,并将这些知识应用于使用物理机器人平台开发废物回收系统的知识。具体来说,该课程将涵盖用于开发废物分类方法的计算机视觉算法,机器人握把和非划分的操纵算法,用于开发废物采摘和重排系统,设计各种采摘机制以及实施端到端的对象拾取管道。该课程包括一个术语项目模块,用于开发废物排序系统的原型。先决条件:RBE 500推荐背景:RBE 549,RBE 4540,CS 541社会辅助机器人技术(2.0 cr。)2024秋季B期限探讨了旨在通过社会互动而不是身体行动来增强人类福祉和我们社会的机器人技术和AI技术的最前沿。本课程涵盖了基础,跨学科的机器人知识,以应对医疗保健,教育和其他领域中现实世界中的挑战。它引入了社会智能机器人技术的发展生命周期,包括设计,开发和评估。具体来说,该课程将涵盖:1)多模式人类机器人相互作用,包括多模式感应和感知,决策和反馈机制; 2)以人为中心的AI,并体现了AI的个性化和适应; 3)在社会辅助环境中的边界研究应用,例如老龄化护理,痴呆症护理,自闭症护理和教育。该课程旨在针对对社会机器人技术,以人为中心的计算,医疗保健,生物医学工程,人类计算机互动和社会科学以及SAR的研究前沿的学生。教学方法包括讲座,邀请专家演讲者的见解以及学生将设计的术语项目模块,建议背景:RBE/CS 526,RBE 549,RBE 595/4540,CS 541
态势感知深度强化学习在网络物理巡飞弹药系统中实现自主非线性机动控制
摘要 —随着无人机技术的快速发展,无人机被广泛应用于包括军事领域在内的许多应用领域。本文提出了一种新型的基于态势感知 DRL 的自主非线性无人机机动性控制算法,应用于网络物理巡飞弹药。在战场上,基于 DRL 的自主控制算法的设计并不简单,因为通常无法收集现实世界的数据。因此,本文的方法是利用 Unity 环境构建网络物理虚拟环境。基于虚拟网络物理战场场景,可以设计、评估和可视化基于 DRL 的自动非线性无人机机动性控制算法。此外,在现实战场场景中存在许多不利于线性轨迹控制的障碍物。因此,我们提出的自主非线性无人机机动性控制算法利用了态势感知组件,这些组件是在 Unity 虚拟场景中使用 Raycast 函数实现的。根据收集到的态势感知信息,无人机可以在飞行过程中自主且非线性地调整其轨迹。因此,这种方法显然有利于在布满障碍物的战场上避开障碍物。我们基于可视化的性能评估表明,所提出的算法优于其他线性机动控制算法。
态势感知深度强化学习在网络物理巡飞弹药系统中实现自主非线性机动控制
摘要 —随着无人机技术的快速发展,无人机被广泛应用于包括军事领域在内的许多应用领域。本文提出了一种新型的基于态势感知 DRL 的自主非线性无人机机动性控制算法,应用于网络物理巡飞弹药。在战场上,基于 DRL 的自主控制算法的设计并不简单,因为通常无法收集现实世界的数据。因此,本文的方法是利用 Unity 环境构建网络物理虚拟环境。基于虚拟网络物理战场场景,可以设计、评估和可视化基于 DRL 的自动非线性无人机机动性控制算法。此外,在现实战场场景中存在许多不利于线性轨迹控制的障碍物。因此,我们提出的自主非线性无人机机动性控制算法利用了态势感知组件,这些组件是在 Unity 虚拟场景中使用 Raycast 函数实现的。基于收集到的态势感知信息,无人机可以在飞行过程中自主且非线性地调整其轨迹。因此,这种方法显然有利于在布满障碍物的战场上避开障碍物。我们基于可视化的性能评估表明,所提出的算法优于其他线性机动控制算法。
态势感知深度强化学习在网络物理巡飞弹药系统中实现自主非线性机动控制
摘要 —随着无人机技术的快速发展,无人机被广泛应用于包括军事领域在内的许多应用领域。本文提出了一种新型的基于态势感知 DRL 的自主非线性无人机机动性控制算法,应用于网络物理巡飞弹药。在战场上,基于 DRL 的自主控制算法的设计并不简单,因为通常无法收集现实世界的数据。因此,本文的方法是利用 Unity 环境构建网络物理虚拟环境。基于虚拟网络物理战场场景,可以设计、评估和可视化基于 DRL 的自动非线性无人机机动性控制算法。此外,在现实战场场景中存在许多不利于线性轨迹控制的障碍物。因此,我们提出的自主非线性无人机机动性控制算法利用了态势感知组件,这些组件是在 Unity 虚拟场景中使用 Raycast 函数实现的。基于收集到的态势感知信息,无人机可以在飞行过程中自主且非线性地调整其轨迹。因此,这种方法显然有利于在布满障碍物的战场上避开障碍物。我们基于可视化的性能评估表明,所提出的算法优于其他线性机动控制算法。
态势感知深度强化学习在网络物理巡飞弹药系统中实现自主非线性机动控制
摘要 —随着无人机技术的快速发展,无人机被广泛应用于包括军事领域在内的许多应用领域。本文提出了一种新型的基于态势感知 DRL 的自主非线性无人机机动性控制算法,应用于网络物理巡飞弹药。在战场上,基于 DRL 的自主控制算法的设计并不简单,因为通常无法收集现实世界的数据。因此,本文的方法是利用 Unity 环境构建网络物理虚拟环境。基于虚拟网络物理战场场景,可以设计、评估和可视化基于 DRL 的自动非线性无人机机动性控制算法。此外,在现实战场场景中存在许多不利于线性轨迹控制的障碍物。因此,我们提出的自主非线性无人机机动性控制算法利用了态势感知组件,这些组件是在 Unity 虚拟场景中使用 Raycast 函数实现的。基于收集到的态势感知信息,无人机可以在飞行过程中自主且非线性地调整其轨迹。因此,这种方法显然有利于在布满障碍物的战场上避开障碍物。我们基于可视化的性能评估表明,所提出的算法优于其他线性机动控制算法。

视觉知觉学习在虚幻的远距离空间中有效,但在近距离空间中无效
摘要 在近体空间 (PPS) 中,与远离身体的物体相比,靠近身体的物体的视觉形状辨别速度更快。当感知深度基于 2D 图像提示时,PPS 中的视觉处理也会增强。从相对低级(检测、大小、方向)到高级视觉特征(面部处理),都观察到了这种优势。虽然多感官联想也显示出近端优势,但 PPS 是否影响视觉感知学习仍不清楚。在这里,我们研究了感知学习效果是否会根据视觉刺激与观察者的距离(近或远)而变化,这是通过利用庞佐错觉幻觉诱导的。参与者执行了视觉搜索任务,他们报告了干扰项中是否存在特定目标物体方向(例如,指向下方的三角形)。在近距离(近组)或远距离(远组)练习视觉搜索任务(每天 30 分钟,持续 5 天)之前和之后评估表现。结果表明,在近距离空间进行训练的参与者没有进步。相比之下,在远空间进行训练的参与者在远空间和近空间的视觉搜索任务中都表现出了进步。我们认为,远空间训练后的这种进步是由于在远空间中更多地部署了注意力,这可以使学习更有效,并可以跨空间推广。
2025年夏季主管的提议
McGill电子邮件:Alexandre.reynaud@mcgill.ca提案(A或B):项目标题(1行):视觉假设/研究问题(1-4行)中双眼组合的动力学(1-4行):要在3个维度上查看,大脑必须整合来自2眼的信息。这种整合得到了求和和抑制机制的支持,在这种机制中,眼睛看到的共同元素是概括的,而不同的元素则被抑制。在这项研究中,我们将评估这些抑制机制的动力学。特定目的(最多12行):大脑结合了从双眼到感知深度的视觉信息。双眼组合是将视网膜略有不同图像融合到单个统一图像的过程。这是通过两种机制发生的:总结,其中左眼和右眼的输入添加在一起,并抑制,其中一只眼睛抑制另一眼的输入。但是,该研究项目评估了时间整合在双眼组合中的作用。初步发现表明,当简短显示刺激时,几乎没有抑制。当前的研究将这项研究扩展到更长的刺激持续时间,以确定抑制和总和的动力学。将使用无源3D屏幕进行基于计算机的实验,以测量不同刺激持续时间的对比度检测阈值。将使用MATLAB分析数据。学生的角色(最多12行):在研究生的监督和指导下,夏季学生将进行基于计算机的行为实验。学生将从正常视力的参与者和被诊断患有弱视的参与者那里收集数据。同时,他们将使用MATLAB学习实验设计,数据分析和数据可视化的基础知识背后的背景和理由。他们将有机会利用用于研究的最新3D屏幕来学习心理物理学和行为测试的基础。