XiaoMi-AI文件搜索系统
World File Search System成像雷达
成像雷达 - NASA 事实 - cloudfront.net
未来任务 SIR-C/X-SAR 第二次飞行在获取重复飞行干涉数据和从这些数据生成高程图方面取得了巨大成功,这促使人们计划进行第三次飞行。美国国家图像和测绘局 (NIMA) 提供资金对 SIR-C 进行改造,增加一个 60 米 (197 英尺) 的吊杆和一个外置天线,操作任务并处理数据,而 NASA 将提供所需的大部分额外资源。这项为期 11 天的任务被称为航天飞机雷达地形测绘仪 (SRTM),它将生成 80% 地球陆地表面的高程图。这次飞行目前列在 2000 年 5 月的航天飞机清单上,但航天飞机时间表的调整可能使 SRTM 飞行更早,或许早在 1999 年春季。

室内定位和4D MMWave成像雷达
状态估计是成功实施机器人系统的关键组成部分,依赖于相机,LIDAR和IMU等传感器。然而,在现实情况下,这些传感器的性能是通过具有挑战性的环境来划分的,例如不利的天气条件和弱光场景。新兴的4D成像雷达技术能够在不利条件下提供强大的感知。尽管有潜力,但对于嘈杂的雷达数据没有明确的几何特征而言,室内环境仍然存在挑战。此外,雷达数据分解和视野(FOV)的差异可能导致不准确的测量结果。虽然先前的研究探索了基于多普勒速度信息的雷达惯性探测仪,但由于FOV和雷达传感器的分辨率差异,估计3D运动的挑战仍然存在。在本文中,我们解决了多普勒速度测量不确定性。我们提出了一种在管理多普勒速度不确定性的同时优化车身速度的方法。基于我们的观察结果,我们提出了双成像雷达配置,以减轻雷达数据中差异的挑战。为了获得高精度3D状态估计,我们引入了一种策略,该策略将雷达数据与消费级IMU传感器无缝整合,并使用固定lag平滑光滑优化。最后,我们使用现实世界3D运动数据评估了我们的方法,并演示了本地化和映射的流任务。

带有成像雷达ISIS的高级空间监视...
德国航空航天中心(DLR)的微波和雷达研究所已开发并构建了一个称为IOSIS(空间中卫星成像)的实验雷达系统。该系统的总体目标是研究概念的研究,用于高分辨率在低地球轨道(LEO)中的高分辨率雷达图像。与现有的基于雷达的空间监视系统(具有单静态天线构型)相比,将来的ISIS不使用一种,而是使用一个空间分布的天线,以处理即将到来的轨道卫星量,并且更重要的是实现双静态成像的几何形状。后者与现有的基于单声道雷达的卫星图像相比,允许增强图像信息内容。本文首先概述了使用反合成孔径雷达(ISAR)的基于雷达卫星成像的基本理论。进一步解决了IOSIS系统的简短描述。根据模拟成像结果说明了对雷达图像的大气影响,并且基于干涉成像结果引入了多通道系统的优势,从而在三个维度中提供了空间分辨率。通过在厘米区域中具有空间分辨率的真实空间对象的IOSIS系统获得的测量结果显示了连续实现的误差校正策略。

使用组合专题制图仪 (TM) 和航天飞机成像雷达 (SIR-B) 图像数据对植被进行特征化
与森林砍伐、碳循环、酸沉降和污染有关的重要问题。此外,全球植物信息在经济方面也很有用,例如调查粮食和纤维资源状况。许多研究人员已经研究了光学数据的信息内容,重点研究了 Landsat 传感器 [即多光谱扫描仪 (MSS) 和专题制图仪 (TM)]。遥感和植物学文献中充满了关于 MSS 和 TM 图像数据的潜在或实际用途的论文(请参阅 Colwell (1983) 的摘要)。其他研究人员已经探索了主动微波数据的信息内容(请参阅 Ulaby 等人 (1983) 的摘要)。很少有研究人员将光学和主动微波数据结合起来用于植被特征描述(Wu,1981)。在本文中,我们介绍了对加利福尼亚州某地区航天器拍摄的光学和有源微波图像数据进行综合研究的结果,该地区的草本植物和木本植被种类繁多。 1984 年 10 月,美国国家航空航天局 (NASA) 进行了第二次航天飞机成像雷达 (SIR) 任务。第一次任务 (SIR-A) 于 1981 年 11 月完成。它是一台合成孔径雷达 (SAR),工作在 L 波段,波长为 23.5 厘米,微波发射和接收均为水平极化(即 HH 极化组合)。SIR-A 以入射角观察地球表面
SAR 指南 - 合成孔径雷达和 - sarmap
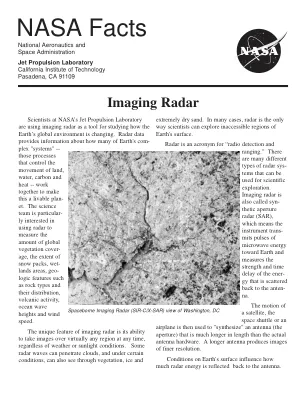
成像雷达是一种主动照明系统。安装在平台上的天线以侧视方向向地球表面发射雷达信号。反射信号(称为回声)从表面反向散射,并在几分之一秒后在同一天线(单基地雷达)上接收。

通过小波压缩提高带宽利用率
传播、下载数据 1 持久自由行动 (OEF) 是阿富汗战争的正式名称,该战争始于 2001 年 10 月,至今仍在进行中。伊拉克自由行动 (OIF) 是伊拉克战争的正式名称,该战争始于 2003 年 3 月,结束于 2011 年 12 月。 2 X 波段是电磁频谱微波无线电区域的一部分,雷达频率为 8.0 – 12.0 GHz。X 波段的较短波长允许高分辨率成像雷达提供更高分辨率的图像,以进行目标识别和区分。

空间物体的高分辨率雷达成像...
因此,除了理论工作之外,德国航空航天中心(DLR)微波与雷达研究所还开发并构建了一种名为 IoSiS(太空卫星成像)的实验雷达系统,用于对获取低地球轨道物体的先进高分辨率雷达图像产品的新概念进行基础研究。本文概述了使用地面 ISAR 对卫星进行高分辨率成像的原理。此外,还概述了实验雷达系统 IoSiS,并简要概述了计划中的 IoSiS-Next Generation 系统概念。最新的真实空间目标测量结果证明了该系统的能力以及使用厘米分辨率成像雷达进行未来基于雷达的空间监视的潜力。作为基于雷达的空间物体成像领域的新产品,全面的模拟结果表明,使用通过多静态成像几何实现的新预期成像概念,可以多么精确地在三维空间中对空间目标进行成像。

OmniHd-Scenes:用于自动驾驶的下一代多模式数据集
摘要 - 深度学习的快速进步加剧了对自动驾驶算法使用的全面数据的需求。高质量数据集对于开发有效数据驱动的自动驾驶解决方案至关重要。下一代自动驾驶数据集必须是多模式的,结合了来自高级传感器的数据,这些数据具有广泛的数据覆盖率,详细的注释和不同的场景表示形式。为了满足这一需求,我们提出了OmniHd-Scenes,这是一个大规模的多模式数据集,可提供全面的全向高清数据。OMNIHD-SCENES数据集结合了来自128束梁雷达,六个摄像机和六个4D成像雷达系统的数据,以实现完整的环境感知。数据集包含1501个夹子,每个夹子长约30秒,总计超过450K同步帧和超过585万个同步传感器数据点。我们还提出了一个新颖的4D注释管道。迄今为止,我们已经注释了200个剪辑,其中有超过514K精确的3D边界框。这些剪辑还包括静态场景元素的语义分割注释。此外,我们还引入了一条新型的自动化管道,以生成密集的占用地面真理,从而有效利用了非钥匙框架的信息。与拟议的数据集一起,我们为3D检测和语义占用预测建立了全面的评估指标,基线模型和基准。这些基准测试利用环绕摄像机和4D成像雷达来探索用于自动驾驶应用的具有成本效益的传感器解决方案。广泛的实验证明了我们的低成本传感器构型及其在不利条件下的鲁棒性的有效性。数据将在https://www.2077ai.com/omnihd-scenes上发布。

小型航天器技术状态
(18 SDS) U.S. Space Force 18 th Space Defense Squadron (19 SDS) U.S. Space Force 19 th Space Defense Squadron (CA) Conjunction Assessment (CARA) NASA's Conjunction Assessment Risk Analysis program (CAESAR) Conjunction Analysis and Evaluation Service, Alerts and Recommendations (CCR) Corner Cube Reflectors (CNES) Centre National d'Etudes Spatiales (French Space Agency) (COTS) Commercial-off-the-Shelf (CUBIT)立方体识别标签(D/T/I)检测,跟踪和识别(EGTN)外分析全球望远镜网络(ELROI)极低的资源光学标识符(EUSST)欧盟空间监视和跟踪计划(FCC)联邦通信委员会(GEOSYNCHRONOUS SYSTITE)GEOSYNCHROUS Equicatial(GEOSYNCHRONOUS GROMANES GNSELSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSER)GNSERTARES GNSERASSSSERTARE(GN) (GUI)图形用户界面(HEO)高度椭圆形轨道(HUSIR)HAYSTACK超级卫星卫星成像雷达(IDS)识别(ILRS)国际激光范围范围服务(LEDS)发光diodes(MEO)中等地球(NPR)NASA Procement Enternement(NPR)NASA Procement nation(NANASOSATERICTION)NANOSATERINE(NANANOSATERICE)NANANOSATERICESTINES(NANANOSELITES) (OCAP)轨道连接评估计划(OEM)轨道胚胎消息(O/OS)所有者/操作员(OSAS)轨道安全分析师(PNT)位置,导航和时间(RF)射频(RF)射频(RFID)射频频率识别(SRI)射电频率识别(SRI)Stanford Research Institute(SSA)空间(SSA)空间(SSA)的尺寸(SSA)的量(SSA)量(SSA)的量(SSA)量(SSN) (TLE)两行元素(TRACSS)空间的交通协调系统(USIR)Ultrawideband卫星成像雷达

利用低峰均功率比宽带伪噪声信号对空间目标进行逆合成孔径雷达成像
摘要:随着新卫星数量的急剧增加,全面的太空监视变得越来越重要。因此,高分辨率逆合成孔径雷达 (ISAR) 卫星成像可以提供对卫星的现场评估。本文表明,除了经典的线性调频啁啾信号外,伪噪声信号也可用于卫星成像。伪噪声传输信号具有非常低的互相关值的优势。例如,这使得具有多个通道的系统可以即时传输。此外,它可以显著减少与在同一频谱中运行的其他系统的信号干扰,这对于卫星成像雷达等高带宽、高功率系统尤其有用。已经引入了一种新方法来生成峰值与平均功率比 (PAPR) 与啁啾信号相似的宽带伪噪声信号。这对于发射信号功率预算受到高功率放大器严格限制的应用至关重要。本文介绍了产生的伪噪声信号的理论描述和分析,以及使用引入的伪噪声信号对真实空间目标进行成像测量的结果。