XiaoMi-AI文件搜索系统
World File Search System成问题



1 2021 年 2 月 1 日 关于 DRI 能源政策草案的评论
更成问题。我知道这只是一个指导方针,但指导方针成为了最低标准。在我们的市中心,我们的占地面积和屋顶面积非常小。根本没有足够的屋顶面积来实现这一点。所以你正在考虑一个场外方案。再加上经济适用房的要求。这些层级与最终结果目标背道而驰。如果你在市中心有一栋混合用途建筑,要实现 100% 太阳能,你正在考虑一个场外方案,你需要购买租金或租赁其他财产,或从其他人那里购买信用额度。如果你只是为其他房屋添加太阳能,你需要 X 金额。不同意申请人的费用微不足道的说法。对于 Lamppost 项目,变压器满足能源需求的成本约为 200,000 美元。每一次推动都会有一次拉动。我们需要注意。100% 场外太阳能作为一种选择是好的,但如果我们让人们坚持这一点,它将在我们的市中心变得非常成问题。• 呈现的所有幻灯片都是准确的。我们处于领先地位,我们需要保持警惕,

803. 血液学中的新兴工具、技术和人工智能:海报 III
对于其他引起血细胞减少症和 MDS 前期病症的原因,如意义不明的特发性血细胞减少症 (ICUS) 和意义不明的克隆性血细胞减少症 (CCUS),这种情况越来越成问题,在这些病症中,形态可能异常,但未达到正式 MDS 诊断所需的发育不良水平
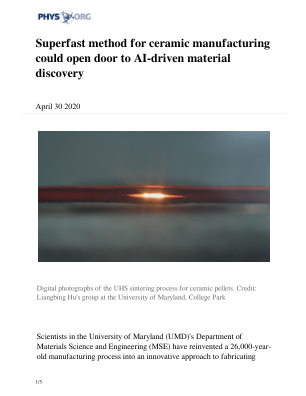
陶瓷制造的超快方法可能为 AI 驱动的材料发现打开大门
传统的烧结技术需要很长的加工时间——炉子需要几个小时才能加热,然后再花几个小时来“烘烤”陶瓷材料——这在固态电池电解质的开发中尤其成问题。替代烧结技术(如微波辅助烧结、放电等离子烧结和闪光烧结)因各种原因而受到限制,通常是因为它们是特定于材料的和/或昂贵的。
250 万美元的法拉利 410 sa - 缓慢死亡
并且我知道几乎世界上每一本汽车杂志都宣称 Discovery I 是世界上最糟糕的卡车之一,其维修记录足以让一个小国沉没(冰岛就是个例子,但它的经济当然已经崩溃了)。更成问题的是,这辆 Disco 的行驶里程为 150,000 英里,这相当于绕地球四圈,或最宽处可横穿英格兰 500 圈——比任何英国汽车的行驶里程都要多。

黑色环氧白纸 REV A
拆卸和更换 IC 和 MMIC(单片微波集成电路)尤其成问题。此返工步骤涉及将组件局部加热至下方环氧树脂的玻璃化转变温度 (Tg) 以上,将平头螺丝刀或工具放在芯片下方并将其挖出。这不可避免地会造成松散的 FM/FOD(异物/异物碎片)等附带损害,因为芯片可能会破碎并对附近的组件造成意外的附带损害。这些松散的导电颗粒是任何腔体密封设备的主要可靠性问题,并且在所有 MIL-STD-883 目视检查测试方法中都得到了详细解决。然后必须将干燥的银环氧树脂刮干净并涂上新的湿环氧树脂。必须小心地放置新组件并将其第二次送入固化炉。接下来是在加热台上进行引线接合,可能借助离线手动引线接合机。然后必须将混合组件赶上批次并送去进行第二轮筛选测试。对于军事工作来说,记录所有这些信息简直是噩梦,而且很难计算返工周期的成本。对未粘住的电线或粘合过度并因脚跟裂纹而断裂的电线进行单独返工稍微容易一些,但仍然很成问题。

欧洲食管癌和胃癌路线图
在大多数情况下,这些癌症都是在晚期才被诊断出来的。这意味着,当患者出现症状时,他们的癌症往往已经发展到晚期,这会阻碍他们的预后。这更加成问题,因为治疗和管理这些癌症的方案/方法很复杂;在最好的情况下,治疗食道癌和胃癌需要进行大手术,这会使患者的生活质量下降,并带来终身的医疗问题。延迟诊断和疾病管理不足在欧洲各地都很明显,需要加以改进。

企业平台团队如何加速 AI/ML 计划
随着 AI/ML 环境的不断扩展,负责运营的团队将大量时间用于执行手动流程、管理不一致的政策以及处理突发状况以保持服务可用性。集群漂移、配置变化和不一致的升级等因素会导致复杂性,从而分散运营团队的注意力,使他们无法关注急需基础设施来满足项目需求的数据科学团队的请求。当昂贵的 GPU 硬件上的执行时间被浪费时,团队对资源使用情况缺乏了解可能会特别成问题。

环境放射性比对练习,1996
报告了一系列环境放射性比对练习中的第六次练习的结果。总体而言,所取得的结果与早期练习的结果相当。锕系元素(在水基质中)的分析显示出一些改进,尽管 f3-ernitting 和 y-ernitting 放射性核素(也在水基质中)的测量结果仅比近年来略有好转。牛奶中 y-ernitting 的测量被证明更加成问题,与具有相同放射性核素组成的水样相比,存在更大比例的不一致结果。一些实验室仍然引用低于相应 NPL 值的不确定性。