XiaoMi-AI文件搜索系统
World File Search System手上

第一章 决策中心战争的兴起
过去十年,美国国防部 (DoD) 越来越多地将其理论和能力发展重点放在大国对手上,例如中华人民共和国 (PRC) 和俄罗斯联邦或拥有核武器的地区大国朝鲜。国防部的规划主要考虑美军在与这些对手的对抗中可能面临的最严峻战役,并假设最坏情况也能满足“情况较轻”的情况的需求。1 然而,对手认识到国防部对高强度作战的关注,因此正在有条不紊地制定战略和系统,通过避免美军已做好准备的局势类型来规避美军的优势并利用其弱点。2 作为不对称对抗美国军事优势的努力的一部分,中华人民共和国和俄罗斯军队所采取的作战方法都强调信息和决策是未来冲突的主要战场。诸如中国人民解放军 (PLA) 的系统破坏战或俄罗斯军队的新一代战争等概念,指挥部队以电子和物理方式攻击对手获取准确信息的能力,同时引入虚假数据,削弱防御者的定位能力。与此同时,侵略者的军事和准军事部队在不升级冲突的情况下孤立或攻击目标,从而为美国及其盟国的大规模军事报复提供借口

高速干手器
• 传统的暖风干手器使用宽幅暖风喷射,通过蒸发来干燥双手。将双手放在干手器出口下方的气流中,典型的干燥时间为 20-30 秒。ETL 不涵盖这种类型的电动干手器。• 高速暖风干手器使用暖风喷射,其驱动速度比传统干手器更高。可以将双手放在干手器下方或插入开口中。使用更强大的电机将空气速度提高到约 50-80 米/秒,从而将干燥时间缩短到约 10-15 秒。因此,通过减少干燥时间和加热要求来节省能源。• 高速环境空气干手器使用高速环境空气,从而物理去除双手上的水分。可以将双手放在干手器下方或插入开口中,空气从两侧引导。用于驱动空气的电机比暖风干手器的电机更强大,因此空气速度更快,并且不需要加热器。典型的干燥时间约为 10-15 秒。
基于差分平面度的一类 3D 空中机械手的 6D 位姿任务轨迹跟踪
I. 引言 A. 背景与动机 近年来,空中操控引起了机器人研究界的极大兴趣 [1]。多个研究小组展示了使用安装在空中机械手上的夹持器进行空中抓取 [2]–[4]。Lee 和 Kim、Kim 等人展示了协作式空中机械手在有障碍物的环境中抓取未知有效载荷 [5],[6]。Orsag 等人演示了使用四旋翼平台和安装在平台上的双臂执行拾取和钉孔任务 [7]。欧盟第七框架计划资助了几个空中机械手项目,研究空中机械手与环境交互时的运动规划和阻抗控制 [8]–[10]。德国航空航天中心的一个研究小组介绍了安装在直升机上的 7 自由度人形手臂的潜在应用 [11]。类似 Delta 的机构 [12] 和并联机械手 [13] 也被考虑用于空中机械手。这些现有的研究为空中操纵的研究提供了广阔的未来。然而,与地面操纵器相比,空中操纵器能够完成的任务仍处于非常初级的阶段。这是由于许多因素造成的,例如
通过使用增强现实眼镜进行跟踪,对个性化假手/外骨骼进行非接触式视觉控制
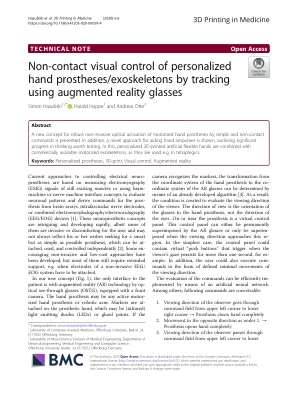
目前控制电动神经假体的方法是基于测量仍然存在的肌肉的肌电图 (EMG) 信号,或使用脑机或神经机接口概念来评估神经元模式,并从脑阵列、束内神经电极或组合脑电图/眼电图 (EEG/EOG) 设备中获取假体的命令 [1]。这些神经假体概念很有趣并且发展很快,尽管其中一些对用户来说是侵入性的或令人不适的,并且可能并不总是反映用户对智能但尽可能简单的假体的愿望,这些假体可以独立地连接、使用和控制[2]。一些令人鼓舞的非侵入性且低成本的方法已经开发出来,但它们中的大多数仍然需要扩展支持,例如当必须连接非侵入性 EEG/EOG 系统的电极时。在我们的新概念(图 1)中,患者唯一的界面是配备前置摄像头的光学透视眼镜 (OSTG) 的增强现实 (AR) 技术。手假肢可以是任何有源电动手假肢或机械臂。假手上附有标记,可以是(红外)发光二极管 (LED) 或胶点。如果

评论:感觉系统,数据处理,手动外骨骼设计上的执行器类型
摘要。触摸后的康复装置是必不可少的,因为中风攻击可能导致人体的一部分或一半。外骨骼可能是中风后患者康复的重要装置。几项研究提出了用于康复目的的外骨骼设计,以实现人类肢体疾病。这项研究旨在根据肌电或任何其他传感器回顾手部外骨骼设备的最先进。本文有望使用肌电传感器和力传感器同时设计手外骨骼设备。这是通过审查与外骨骼开发有关的几篇文章来实现的,尤其是在传感器系统,数据处理和执行器系统中。结果表明,仍然发现使用Ag电极一次性AG(AGCL)检测手指在手上的运动,因为该传感器可以减少伪影噪声。在几项研究中也发现了肌臂的使用,因为它具有无线特性,因此易于使用。在处理器方面,Arduino微控制器比其他微控制器更广泛地使用。为了激活手部外骨骼,伺服电动机被更广泛地用于启动手指关节,这比其他执行器更精确。在进一步的发展中,外骨骼系统和信息系统之间的整合将是一个预期的挑战。希望,这种外骨骼的发展可以作为康复装置应用于故障或瘫痪的患者。

胃肠道作为药物的副作用
世界卫生组织(WHO)将不良药物反应(ADR)定义为“对有害和意外的药物的反应,并且以通常用于预防,诊断或治疗疾病的剂量或生理功能的修改时,这种反应是有害和意外的。ADR是当代药物疗法的严重问题。在美国治疗ADR的支出可能最高30。每年10亿美元。影响ADR的开发的因素是:年龄,性别,体重,多药。约有10%的ADR与胃道Tinal Tract(GIT)有关。adr会影响git的每个部分。静脉静脉体是口腔中最常见的ADR。ADR包括灌溉和粘膜炎症。大约三分之一的食管炎症病例是由非甾体类抗炎药(NSAID)施用引起的。参与胃和小肠的溃疡的主要原因是NSAID。药物诱导的腹泻是所有观察到的ADR病例中约7%的最常见的不良反应AC计数。它们可能是由抗生素,镁盐,泻药等触发的。在手上,一些药物可能会引起便秘。这些药物包括阿片类药物,利尿剂,钙通道阻滞剂,胆碱分解剂等。质子泵抑制剂,Met formin,Orlistat和Colesevelam可能导致某些维生素和矿物质的吸收受限。医生对最受欢迎且文献良好的ADR的了解可以提高患者的安全性,并使Pharmaco疗法对他们更舒适。
社论:肠道微生物组在动物肠道连锁疾病中的潜在作用
微生物,包括细菌,真菌和病毒,它们在协同或拮抗关系中相互作用以维持稳定的肠道环境和功能(Zheng等,2020)。稳定的肠道微生物群已被证明是肠道执行各种复杂生理过程的先决条件,但是肠道微生物营养不良可能导致多种胃肠道疾病,包括腹泻,胃痛和结肠炎。此外,肠道微生物群落的影响范围超出了胃肠道系统,并可能引起其他全身性疾病。同样,为了提高我们对微生物组和宿主相互作用的知识,并开发了一种有效的方法来恢复扰动的动物和人类微生物生态系统。动物胃肠道系统中的肠道微生物替代或肠道微生物组组成和功能的差异与各种疾病有关,从代谢条件和胃肠道炎症到结肠炎到结肠炎,呼吸道疾病和呼吸道疾病。在这一研究领域,Zhang等。在过去的10年中对肠道和溃疡性结肠炎研究领域中的出版物进行了文献计量分析,这总结了有关肠道肠和溃疡性结肠炎全球研究趋势的当前知识。在另一只手上,了解整个肠道的微生物组成,并就如何提高动物的整体健康和生产力提供见解。Chang等。Chang等。已更新了我们对肠道猪的肠道菌群的结构和功能的了解,而藏猪猪的不同生长和发育阶段,这在其免疫性能中起着重要作用。

门把手细菌含量评估
微生物无处不在,细菌和真菌污染着人体、房屋、工作场所和环境。幸运的是,在数十亿种细菌中,只有 1500 种细菌对健康有害,可导致肺炎或皮肤感染等不同疾病。在大学环境中,学生们经常出于不同目的进入服务办公室。由于门把手没有定期消毒,污染微生物传播的机会很大。这项研究旨在评估尼日利亚麦当娜大学门把手上的细菌。样本采用美国公共卫生协会的拭子冲洗法采集。对采集到的每一份样本都进行了处理,以识别样本中的细菌。采用了以下处理技术:培养、革兰氏染色和生化测试。研究结果表明,学生事务处大肠杆菌是最常见的生物,占 100%。 Medlab 科学大楼中金黄色葡萄球菌占比最高,为 50%,肺炎克雷伯菌占比 33.3%,大肠杆菌占比 16.7%。而蓝白相间的行政大楼中腐生葡萄球菌和肺炎克雷伯菌占比最高,分别为 40%。科学大厅中肺炎克雷伯菌的流行率为 100%。这项研究还揭示了革兰氏反应的百分比各不相同,革兰氏阴性菌的反应百分比高于革兰氏阳性菌。由于这些办公室的各种门把手中都发现了各种形式的微生物,因此建议不时进行适当的消毒,以确保对这些把手进行彻底消毒,以限制或减少这些微生物的传播。
干细胞移植后的广义白癜风
案例介绍一个13岁的女儿来到我们的医院,“白斑散布在整个体内2年”。三年前,该患者在另一家医院被诊断出患有“严重的性贫血”。在此期间,患者被重复的红细胞和血小板输血治疗。2019年4月,在计划的预处理方案(FLU+CTX+A1G)之后,进行了一个无关,血型不兼容,HLA10/10纯合子和Allo-HSCT。在术后22天,孩子的四肢逐渐开始在四肢上显示淡红皮疹的迹象,并伴随着直径为7-8厘米的多个散射的水脓疱。然后,患者出现了广泛的脱离。在手术后的第二个月中,患者发育于间歇性高烧(38°C至39.5°C),没有明显的诱导,以及宽阔的棕色佛罗里德皮疹,脱离剂量,后来被诊断为“急性移植术,EBV感染,EBV感染,和大细胞病毒病毒感染”。在手术后的第八个月中,白斑开始出现在患者的手上,该斑点逐渐增加并变得更大。白点进一步扩大,并扩散到整个身体。由于术后15个月的骨髓活检的改善,诸如环孢霉素,霉酚酸酯和激素等药物被停用。在手术后20个月,指关节大小显示出全身散射的颜色回收,并逐渐更大。该患者来我们医院进行诊断,并被诊断出患有白癜风样GVHD。辅助检查:皮肤CT(颈):被认为

体感皮质的生物映射多通道微刺激传达了仿生手的高分辨率力反馈
手动相互作用与对象相互作用受到手的触觉信号的支持。这种触觉反馈可以通过体感皮质(S1)的心脏内微刺激(ICM)在脑控制的仿生手中恢复。在基于ICMS的触觉反馈中,可以通过基于仿生手上力传感器的输出调节刺激强度来发出接触力,这又调节了感知的感觉的幅度。在本研究中,我们在三名参与者中衡量了基于ICMS的力反馈的动态范围和精度,这些参与者植入了S1中的微电极阵列。为此,我们测量了由于ICM振幅增加以及参与者区分不同强度水平的能力而导致的感觉幅度的增加。然后,我们通过实施“仿生” ICMS培训来评估是否可以提高反馈的忠诚度,旨在唤起神经元活动的模式,这些模式更紧密地模仿那些自然接触的人,并一次通过多个通道传递ICMS。我们发现,多通道仿生ICMS产生的感觉比单通道对应物更强,更有区别。最后,我们用仿生手实施了仿生多通道反馈,并让参与者执行合规性歧视任务。我们发现,仿生多通道触觉反馈对单渠道线性对应物产生了改善的歧视。我们得出的结论是,多通道仿生的ICMS传达了精细分级的力反馈,该反馈更接近自然接触所赋予的灵敏度。