XiaoMi-AI文件搜索系统
World File Search System手指

使用具有触觉传感的灵巧手指的可变形线性对象
摘要 - 关于可变形线性对象(DLO)操纵的大多数研究都假定刚性抓握。然而,除了刚性的抓握和重新抓紧之外,在掌握的范围之外,人类也是人类使用敏捷操纵DLOS的重要技能,它需要通过握住DLO来防止其掉落的同时通过手动滑动来连续更改抓握点。在没有使用专门设计但不是多功能的最终效果的情况下,实现这种技能对于机器人来说非常具有挑战性。以前的作品尝试使用通用的平行抓地力,但是由于关注和持有之间的冲突,它们的稳健性并不令人满意,这很难与一级自由的抓手保持平衡。在这项工作中,受到人类如何使用手指跟随DLOS的启发,我们探索了具有触觉感知的通用灵巧的手的用法,以模仿人类的技能并获得强大的DLO跟随。为了使硬件系统能够在现实世界中运行,我们开发了一个框架,其中包括笛卡尔空间手臂控制,基于触觉的In-Hand-hand 3-D DLO姿势估计以及特定于任务的运动设计。实验结果证明了我们方法比使用平行抓手的显着优势,以及它的稳健性,可推广性和效率。

任务环境对预测脑机接口中手指运动的影响
摘要 将脑机接口 (BMI) 应用于临床以恢复手部运动功能的一个关键因素是其对任务变化的稳健性。例如,使用功能性电刺激 (FES),患者自己的手将用于在其他方面类似的运动中产生各种各样的力量。为了研究任务变化对 BMI 性能的影响,我们训练了两只恒河猴用它们的物理手控制虚拟手,同时我们在每个手指组(食指或中指-无名指-小指)中添加弹簧或改变它们的手腕姿势。通过同时记录皮层内神经活动、手指位置和肌电图,我们发现在一种环境下训练的解码器不能很好地推广到其他环境下,导致预测误差显著增加,尤其是对于肌肉激活。然而,对于虚拟手的在线 BMI 控制,在线控制期间改变解码器训练任务环境或手的物理环境对在线性能几乎没有影响。我们通过展示神经群体活动的结构在新的环境中保持相似来解释这种二分法,这可以实现在线快速调整。此外,我们发现神经活动会根据新环境中所需的肌肉激活按比例改变轨迹。神经活动的这种转变可能解释了对非背景运动学预测的偏差,并提出了一种特征,该特征可以帮助预测不同幅度的肌肉激活,同时产生相似的运动学。

脉搏血氧仪的组织模仿材料和手指幻影设计
摘要:脉搏血氧饱和度代表现代医学中光学的无处不在的临床应用。最近的研究引起了人们对混杂因素的潜在影响的担忧,例如可变的皮肤色素沉着和灌注对脉搏血氧仪中血氧饱和度测量精度的影响。模拟幻影测试提供了低成本,控制良好的解决方案,用于表征设备性能并研究潜在的误差源,从而可以减少对体内昂贵的体内试验的需求。这项研究的目的是开发基于幻影的脉搏血氧仪的测试方法。材料光学和机械性能审查,选择和调整以达到最佳的生物学相关性,例如,含氧组织的吸收和散射,强度,强度,弹性,硬度以及代表人手指的几何形状和组成的其他参数,例如血管大小和分布和分布和灌注。相关的解剖学和生理特性总结并实施,以创建初步的手指幻影。为了创建初步的手指幻影,我们合成了一个具有散射器的高符合硅胶基质,用于嵌入柔性管,并研究了这些散射物在新颖的3D打印树脂中以进行光学性能控制,而无需改变机械稳定性,而不改变具有与生物学特征的幻象的产生。幻影实用程序。3D印刷幻象在生物学上相关的条件更加相关。这些初步结果表明,幻影具有强大的潜力,可以发展为评估脉搏血氧仪性能的工具。差距,建议和策略是为了持续的幻影开发而提出的。

通过整合视觉,触觉感应和软手指来实时杂货店包装
摘要 - 尽管垃圾箱是机器人操纵的关键基准任务,但社区主要集中于将刚性直线物体放置在容器中。我们通过呈现一只软机器人手,结合视力,基于运动的本体感受和软触觉传感器来识别,排序和包装未知物体的流。这种多模式传感方法使我们的软机器人操纵器能够估计物体的大小和刚度,从而使我们能够将“包装好容器”的不定定义的人类概念转化为可实现的指标。我们通过逼真的杂货包装场景证明了这种软机器人系统的有效性,其中任意形状,大小和刚度的物体向下移动传送带,必须智能地放置以避免粉碎精致的物体。将触觉和本体感受反馈与外部视力结合起来,与无传感器基线(少9倍)和仅视觉的基线相比,项目受损的填料操作显着降低(4。少5×)技术,成功地证明了软机器人系统中多种感应方式的整合如何解决复杂的操作应用。

用于手指小米的新型基于GBS的SNP标记及其在遗传多样性分析中的使用
eleusine coracana(L。)Gaertn。(通常称为纤维小米)是一种用于食物和饲料的多功能作物。基因组工具对于作物基因库的表征及其基因组主导的繁殖需要。基于高通量测序的表征代表多种农业生态学的纤维细胞种质,被认为是确定其遗传多样性的有效方法,从而提出了潜在的繁殖候选者。在这项研究中,使用基因分型(GBS)方法同时鉴定新型的单核苷酸多态性(SNP)标记和基因型288纤维小米辅助量,从埃塞俄比亚和津巴布韦收集。使用5,226个BI-Callelic SNP在个人和组水平上进行表征,最小等位基因频率(MAF)高于0.05,分布在2,500个纤维小米参考基因组的2,500支支架上。SNP的多态性信息含量(PIC)平均为0.23,其中四分之一的PIC值超过0.32,这使得它们非常有用。基于地理位置的288个加入分为七个种群和种质交换的潜力显示,观察到的杂合性范围狭窄(HO; 0.09 - 0.11)和预期的杂合性(HE),其范围超过了Twofold,从0.11到0.26。等位基因在不同群体中独有的等位基因也得到了识别,这值得进一步研究其与理想性状的潜在关联。在AMOVA,群集,主要坐标和人口结构分析中,埃塞俄比亚和津巴布韦附属之间的高遗传分化很明显。分子方差的分析(AMOVA)揭示了基于地理区域,原产国,流动式,泛质类型和易耐受性的种类群之间的高度显着遗传分化(p <0.01)。菲格尔小米附属的遗传多样性水平在埃塞俄比亚内部的位置中适度变化,北部地区的加入水平最低。在邻居加入聚类分析中,这项研究中包括的大多数改进的品种都非常紧密,这可能是因为它们是使用遗传学上不同的种质和/或以类似性状(例如谷物产量)选择的。通过来自两国不同地区的跨植物上不同的遗传学加入来重组等位基因,可能会导致出色品种的发展。

通过AI增强的Triboelectric多模式传感器启用了对机器人手指的增强触觉感知
机器人技术的最新发展越来越多地强调了传感技术,尤其是触觉感知的重要性,使机器人能够有效地与其环境互动并解释物理相互作用。由于功率效率和低成本,经常研究底层电离机制,用于测量压力和识别材料以增强机器人感知。尽管如此,尽管它们在日常生活中盛行,但仍有使用互动效应来检测弯曲表面的探索有限。在这里,提出了多层结构设计的摩擦多模式触觉传感器(TMTS),以同时识别不同的材料,曲线和压力,从而将不同的方式解耦以启用更准确的检测。通过将传感器连接到机器人的纤维上并利用深度学习分析,定量曲率测量可为对象的详细几何特征提供更精确的见解,而不是仅仅评估其整体形状,因此可以实现具有99.2%精度的12个Grasped对象的自动识别。传感器可以进一步用于准确识别机器人手的不同触摸手势下的物体的柔软度,达到94.1%的精度,证明了其在未来机器人支持的智能社会中的广泛应用。

基于面部,手指静脉,指纹和虹膜的生物特征识别的文章深度学习模型:调查
摘要:最近,个体生物特征引起了很多关注,并且是建立多种安全性和真实性系统的核心,例如监视,法医,欺诈性披露和基于身份的访问控制。广泛的生物识别性特征使选择合适的问题是至关重要的问题,这主要取决于应用程序的类型,样本的可用性,复杂性的程度和可能性的可接受价值。机器学习算法的概念对最后的方式产生了极大的兴趣,尤其是它被称为深度学习神经网络的进化版本。机器学习已在许多生物识别系统中使用和实施,因为其强大的属性和功能可以为系统提供所需的目标,具有出色的性能。这项工作旨在对过去七年来的190多种有前途的作品进行广泛的调查,描述了基于多种基于生物特征的深度学习系统,这些深度学习系统基于四个流行和大多数使用的特征,包括面部,指纹,Iris和Finger Finger静脉。本文还介绍了两种生物识别技术的简要回顾和深度学习神经网络。

使用运动单位放电信息在手指屈曲和延伸过程中的灵活力估计
摘要 - 随着高级机器人手的发展,可靠的神经机界面对于充分利用机器人的功能灵活性至关重要。在这项初步研究中,我们开发了一种新的方法,可以在灵巧的手指屈曲和伸展过程中连续和同时估计单个手指的等距力。具体而言,分别从手指伸肌和屈肌记录的表面高密度肌电图(EMG)信号中提取运动单元(MU)排放活性。MU信息被分为不同的组,与单个手指的屈曲或伸展相关,然后在多手指屈曲和扩展任务期间用于预测单个手指力。与常规EMG振幅方法相比,当使用线性回归模型时,我们的方法可以获得更好的力估计性能(预测力和测量力之间的较高相关性和较小的估计误差)。对我们方法的进一步探索可以潜在地提供强大的神经机界面,以直观地控制机器人手。
用于手指解码和四轴飞行器控制的实时高性能脑机接口
此预印本的版权所有者于 2024 年 2 月 8 日发布此版本。;https://doi.org/10.1101/2024.02.06.578107 doi:bioRxiv preprint
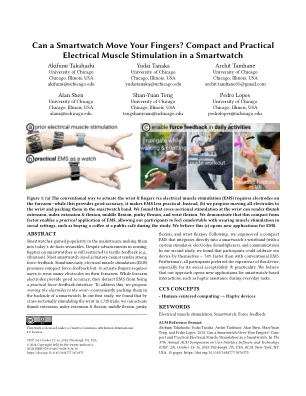
智能手表可以移动手指吗?智能手表中紧凑而实用的电肌刺激
图1:(a)通过电肌肉刺激(EMS)操作手腕和手指的常规方法需要前臂上的电极 - 虽然这提供了良好的准确性,但它使EMS的实用性降低了。相反,(b)我们建议将所有电极移动到手腕,然后将它们包装在智能手表频带中。我们发现手腕处的横截面刺激可以使拇指伸展,索引扩展和屈曲,中间屈曲,小指屈曲和手腕屈曲。我们证明,这种紧凑的形式可以实现EMS的实际应用,使我们的参与者可以在社交环境中佩戴肌肉刺激感到满意,例如在研究期间在公共咖啡馆购买咖啡。我们相信(c)为EMS打开了新的应用程序。