XiaoMi-AI文件搜索系统
World File Search System手指

高档名优绿茶柔性采摘指研制 - 金小俊
传感器与微系统 第 44 卷 殊形状的刀片完成剪切,采摘成功率达 97 . 36 % 。进一步 设计了一种提拉断梗的机械手,舵机带动主动手指和从动 手指转动,将茶梗折弯并拉断,采摘成功率为 74 . 3 % 。华 中农业大学 [ 6 ] 设计了一种结构为曲柄滑块剪切机构的末 端执行器,通过刀片闭合将鲜叶掐断,利用真空装置将剪切 后的茶叶吸入容纳箱。四川农业大学 [ 7 ] 设计了一种可夹 提式采摘茶叶嫩梢的末端执行器,通过预设夹持力使夹持 件夹断嫩梢叶柄,对一芽一叶和一芽两叶都达到较高的采 摘率。纵观现有大宗茶采摘末端执行器的结构和特点,多 以刀片切割的方式作为采摘原理,无法保证芽叶的完整,这 将在很大程度上降低茶叶的品质,不能用于高档名优绿茶 采摘。南京林业大学 [ 8~12 ] 基于机器视觉、颜色特征、并联 机器人等技术,研发了对新梢有选择性采摘的机器人,研制 了一种气动采摘指,设置固定阈值,确定采摘指夹持嫩芽时 的闭合间隙,通过提拉动作完成采摘,成功率达到 90 % 。 由于自然生长的新梢枝条粗细不一,夹持时的夹持力波动 较大,会存在打滑或夹断现象。 针对现有采茶末端执行器导致嫩芽完整性的不足,本 文设计了一种柔性可感知的仿生采摘指作为采茶机器人的 末端执行器,模仿人工“提手采”的动作,通过固定和提拉 动作实现嫩芽采摘,并增加夹持力测量电路,在夹持过程中 检测夹持力,提高采摘成功率。
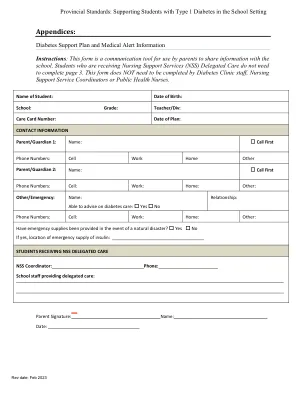
省标准:在学校环境中为学生提供1型糖尿病的学生
按顺序排序的说明(请参见下列)(请参见下文)•通过拉动红色条带在管子上卸下收缩包裹•打开盖子并将设备从管子上卸下•将设备握在第二个手指和第3个手指和拇指之间(请勿按下!)•轻轻插入一个鼻孔,直到您的手指在学生的鼻子外面触摸•一直牢固地推入柱塞,直到不再显示绿线•扔掉•扔掉设备/管为止;一次使用•一旦学生警惕,给果汁或替代快速糖


使用扩展的块项张量回归根据颅内脑活动预测手指运动和共同激活
每年,全球有多达 50 万患者因脊髓损伤、脑干中风和肌萎缩侧索硬化症 (ALS) 而陷入瘫痪 [1]。脑机接口 (BCI) 能够绕过断开的神经通路来取代丢失或受损的身体部位的功能,这使得它们被推广为这些患者的解决方案。通常,BCI 系统由几个组件组成:从记录的大脑活动中提取信号特征,并将结果翻译(“解码”)为控制外部设备(如机械臂或手)的命令。BCI 控制手部肌肉的功能性电刺激 (FES) [2, 3] 和假手、外骨骼或其他效应器 [4, 5, 6, 7] 已经取得了非凡的成果。

单侧手指运动过程中的镜像视觉反馈与皮质脑电图躯体运动型alpha Rhythms
抽象使用镜子足够定向,另一只手的运动与另一只手诱导了运动的液化。在这里,我们检验了以下假说:这种镜像现象可以由脑脑摄影(EEG)事件相关的dengronic/同步(ERD/ERS)的基础(EEG)中央alpha节奏(ERD/ERS)(约10 Hz)作为神经物理学的相互作用,以及在糖果中的神经物理学测量,以及在糖果群体之间的相互作用,并在糖果中的互动量。 执行。十八位健康的右手男性参与者在没有镜子(M-)条件下进行了标准听觉触发的单侧(右)或双侧手指运动。在镜子(M +)条件下,在镜子前面进行单侧右手指运动,以诱导同时左手手指运动的幻觉。EEG活性记录在64个头皮电极中,并使用与事件相关的EEG时期进行计算αERD。在M-条件下,在双侧运动中观察到双侧突出的中央αERD,而在单侧右运动中,左中央alpha ERD和右中央alpha ers均观察到。相反,M +条件显示出明显的双侧和广泛的alpha erd dur-
欺骗您的眼睛在大脑上发挥作用 - 错觉
1。将纸放在您前面的桌子上,长侧位于水平位置。将您的非写入手放在纸张中间。将手指稍微分开,但指向。应该指出您的拇指。2。用铅笔追踪您的手。请确保将铅笔上下握住,而不是倾斜。小心地围绕着手指而不是在手指上画。花点时间。3。用尺子在纸张的左侧和右边缘放置一个小点。使用标尺引导您,从页面上水平绘制直线平行线(从左边缘标记到右边缘标记),从左边缘的点到右边缘的相应点。不要在您伸出手的地方绘制直线直线。当您伸到手上,向上绘制曲线,然后向下划清曲线以满足另一侧的匹配平行线。曲线之间的空间应为相同的宽度。4。重复绘制直线和弯曲的平行线,直到填充纸。5。在指关节所在的手上画一条直线。6。每个手指上的线将从平行线上弯曲,并平行于曲线的开头。在手指之间拉直线。通过示范 - 直线,曲线进行交谈;直线,曲线;直线,曲线;直线,曲线;直线,曲线;直线。在这些水平线上保持平行的距离。
非人类灵长类动物的实时脑机接口利用浅前馈神经网络解码器实现高速假肢手指运动
尽管用于恢复运动功能的脑机接口技术发展迅速,人们对此也产生了浓厚的兴趣,但假手指和假肢的性能仍无法模仿自然功能。将脑信号转换为假肢控制信号的算法是实现快速逼真的手指运动的限制因素之一。为了实现更逼真的手指运动,我们开发了一个浅层前馈神经网络来解码两只成年雄性恒河猴的实时双自由度手指运动。使用两步训练方法,引入重新校准的反馈意图训练 (ReFIT) 神经网络以进一步提高性能。在对两只动物进行 7 天的测试中,神经网络解码器的手指运动速度更快、更自然,与代表当前标准的 ReFIT 卡尔曼滤波器相比,吞吐量提高了 36%。这里介绍的神经网络解码器展示了优于当前最先进水平的连续运动的实时解码,并可以为使用神经网络开发更自然的脑控假肢提供一个起点。
医学和生物学中的力学 - AMS Acta
手部接收感觉刺激并执行运动指令,这些指令整合到日常任务的各种功能操作中。手指运动笨拙低效、力量协调性和力量较差、患手运动控制感觉缺陷是患者最常见的现象。因此,我们的研究团队开发了一系列手部功能控制训练系统,以探索执行功能任务时的力量模式特征,并对功能姿势下的手指力量控制进行训练和评估。通过互动游戏提高患者的积极性,同时整合视觉和听觉反馈以获得更好的干预效果。对于腕管综合征患者,他们在不同任务需求中以更大的手指力量抓握,与较弱的成对手指相关性和特定手指上的力量变化较大相关。此外,还开发了定制设计的计算机化评估和再教育生物反馈原型,用于分析手部抓握表现并监测训练对感觉障碍且无运动缺陷的中风患者的手部协调性的影响。最后,对轻度认知障碍患者的训练显著提高了手部灵活性和认知功能,这与先前的研究结果一致,即精细运动表现可以区分认知障碍患者和健康人。

当视频遇到惯性传感器:使用惯性传感器进行手指运动分析的零样本域自适应
无处不在的手指运动追踪使增强现实、体育分析、康复医疗保健等领域的许多激动人心的应用成为可能。虽然使用摄像头的手指运动追踪非常成熟,这很大程度上归功于大量训练数据集的可用性,但是对于为带有惯性测量单元 (IMU) 传感器的可穿戴物联网设备开发强大的机器学习 (ML) 模型来说,训练数据却十分匮乏。为了解决这个问题,本文提出了 ZeroNet,这是一个展示以零训练开销为 IMU 传感器开发 ML 模型的可行性的系统。ZeroNet 从公开的视频中收集训练数据以对 IMU 进行推理。由于传感器-摄像头坐标系、用户身体大小、手势过程中的速度/方向变化、传感器位置变化等差异,视频和 IMU 域之间的数据差异带来了许多挑战。ZeroNet 通过系统地从视频中提取运动数据并将其转换为 IMU 传感器测量的加速度和方向信息来解决这些挑战。此外,还利用数据增强技术在收集的训练数据中创建合成变化,以增强 ML 模型对用户多样性的通用性和鲁棒性。对 10 位用户的评估表明,对于 50 个手指手势的识别,top-1 准确率为 82.4%,top-3 准确率为 94.8%,这表明前景光明。虽然我们只是触及了表面,但我们概述了许多有趣的可能性,可以将这项工作扩展到计算机视觉、机器学习和可穿戴物联网等跨学科领域,从而实现手指运动跟踪的新应用。
在大脑的沟和白质区域解码神经活动,以准确预测人手的单个手指运动和触觉刺激
全世界数百万人因中风,脊髓损伤,多发性硬化症,脑损伤,糖尿病和运动神经元疾病(如ALS)(肌萎缩性横向硬化症)而遭受运动或感觉障碍。将大脑直接连接到计算机的脑部计算机界面(BCI)提供了一种研究大脑并可能恢复患有这些衰弱状况的患者的障碍的新方法。然而,当前面临的BCI技术面临的挑战之一是在维持效率的同时最大程度地降低手术风险。微创技术,例如立体电脑摄影(SEEG),在癫痫患者的临床应用中已更广泛地使用,因为它们会导致并发症较少。SEEG深度电极还可以进入大脑的沟和白质区域,但尚未在脑部计算机界面中进行广泛研究。在这里,我们展示了与人手中的运动和触觉相关的沟和皮质下活性的第一个演示。此外,我们已经将基于SEEG的深度记录中的解码性能与用电视造影电极(ECOG)获得的分解性能进行了比较。最初的解码性能和观察到大多数神经调节模式在振幅试验到审判中的变化而变化,并且是短暂的(比研究的持续纤维运动的持续性纤维运动的差异明显短),导致基于使用时间相关的可重复性指标的特征选择方法的开发。开发了一种基于时间相关的算法,以隔离始终重复的特征(准确解码所需)并具有与运动或触摸相关刺激有关的信息内容。随后,我们使用这些功能以及深度学习方法来自动对具有高精度的单个纤维的各种电动机和感官事件进行分类。