XiaoMi-AI文件搜索系统
World File Search System打滑
空军全球打击司令部 B-1B 事故......
事故发生在另一架 B-1B 进行训练飞行后的着陆过程中,这架 B-1B 也驻扎在埃尔斯沃斯空军基地。两架飞机完成训练任务返回时,由于云层较低,两架飞机都进行了低能见度进近。第一架飞机平安着陆,浓雾笼罩着机场。第二架飞机试图着陆,但在跑道前撞到地面,开始在跑道外打滑,最后停在两条滑行道之间。飞机起火,导致这架价值 4.5 亿美元的轰炸机全部损毁。
自行车/滑板/滑板车/溜冰鞋 PPE 安全...
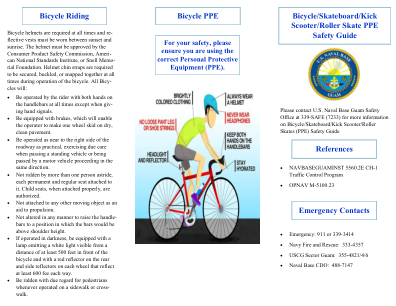
除打手势时外,骑行者必须始终用双手握住车把。 配备刹车,使操作者能够使一个车轮在干燥、干净的路面上打滑。 尽可能靠近道路右侧驾驶,在超越停放的车辆或被同方向行驶的机动车超越时要小心谨慎。 不得让多人跨骑,每个永久和常规座椅都应固定在车把上。儿童座椅在正确安装后是允许的。 不得固定在任何其他移动物体上作为推进辅助工具。 不得以任何方式改装车把以使其高于肩部。 如果在黑暗中驾驶,必须配备一盏白光灯,该灯在自行车前方至少 500 英尺处可见,并在车后配备红色反光镜,每个车轮配备侧面反光镜,每个方向的反光镜至少可反射 600 英尺的光线。 在人行道或人行横道上行驶时,应充分注意行人。

进近时遇到强烈湍流侧向风,200 英尺以下不稳定,后期拉平和硬着陆
他进一步表示,他不习惯使用 A/THR,他更喜欢在 A/THR 断开的情况下进近。稳定高度设置为 1,000 英尺 AGL。他补充说,他已经向副驾驶解释过,如果他认为有必要,他可以要求中止进近。ACARS 在 06 时 47 分收到的 ATIS O 提到风速为 25 节,风向为 210°,阵风为 37 节。他解释说,他查看了 MCDU 上显示的 Vapp 值,并且在进近过程中他使用了这个值,在该值上增加 5 到 10 节作为手动飞行的目标速度,但没有修改 MCDU 上 PERF APPROACH 页面上显示的值。下降 200 英尺后,他看到 PAPI 上的三个红灯和速度趋势增加。他解释说,在最后进近时,飞机向左急速倾斜让他很惊讶,他担心左翼会碰到跑道。他说他没有时间拉平。他考虑过中止着陆,但当他注意到飞机没有打滑时,他宁愿减少推力并部署反推装置。

带有触觉传感的机器人手的通用滑动检测
滑动检测是要识别抓握过程中对象是否保持稳定,这可以显着增强操纵灵量。在这项研究中,我们探索了能够执行各种掌握类型的五指机器人手的滑移检测,并在整个五个手指上检测到滑移,而不是专注于单个指尖。首先,我们构建了一个在六种抓地力类型的日常生活中收集的数据集,其中包括200 k个数据点。第二,根据深重下降的原理,我们为不同的抓握类型(USDConvnet-dg)设计了一个轻巧的通用滑动检测网络,以对掌握状态进行分类(无触摸,打滑和稳定的抓紧)。通过将频率与时域特征相结合,该网络的计算时间仅为1.26 ms,平均精度在验证和测试数据集上的平均精度超过97%,表明了强大的概括功能。此外,我们在现实世界中的实时掌握力调整中验证了提出的USDConvnet-DG,表明它可以有效地提高机器人操作的稳定性和可靠性。
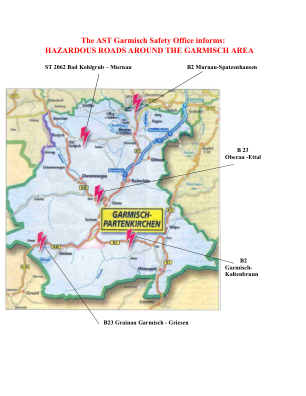
加米施地区周围的危险道路
B23 高速公路,从加米施-帕滕基兴前往奥地利,位于格赖瑙-格里森之间,靠近“Oxenhuette”。冬季事故不仅是由于该地区缺乏阳光造成的,还由附近滑雪胜地的造雪机产生的雪引起。其他事故原因: - 超速行驶(2003 年 - 10 起事故 - 6 起因于超速行驶) B 23 号公路,OBERAU - ETTAL 之间 事故原因: - 在危险的 S 形弯道上打滑(由于新铺设了沥青路面,2003 年在 S 形弯道顶部仅发生 5 起事故) B 2 号公路,GARMISCH-KALTENBRUNN 之间,又称“SCHWABE KURVE”(2003 年 - 10 起事故) 事故原因: - 超速行驶 - 黑冰 - 雪和冰 B 2 号公路,MURNAU-SPATZENHAUSEN 之间 事故原因: - 超速行驶 2062 号街道,BAD KOHLGRUB - MURNAU 之间(2003 年发生 1 起死亡事故) 事故原因: - 超速行驶(现在大部分路段的限速为 70 公里)路)

飞机轮胎橡胶与粗糙表面之间动态摩擦接触的实验和数值模拟
摘要:本文介绍了一种使用依赖于温度和接触压力的可变摩擦系数对飞机轮胎与粗糙表面接触进行数值模拟的方法。使用滑动装置来评估摩擦系数的这种依赖性。通过热电偶测量整个轮胎横截面的温度扩散。将摩擦生热和温度扩散与数值二维和三维模拟进行了比较。可以获得足够的温度预测。在未来的模拟中,应考虑磨损,以便进行更准确的模拟,特别是在高压和滑动速度的情况下。使用依赖于温度和压力的可变摩擦系数研究了速度为 37.79 节(19.44 米/秒)并处于转弯阶段的滚动轮胎的 3D 有限元模型。数值模拟倾向于预测轮胎胎面在打滑位置滚动几秒钟后的温度,接触区的温度升高到 140 ◦ C。必须进行进一步调查才能获得实验观察到的温度变化。作者想指出,出于保密原因,某些数值数据不能透露。
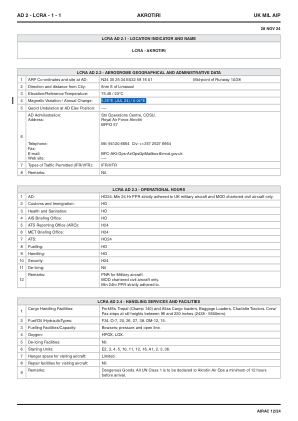
AD 2 - LCRA - 1 - 1 英国军用 AIP 阿克罗蒂里
1. 注意。10/28 号跑道的混凝土末端和距离 10 号跑道入口 2000 英尺以内的跑道区域在潮湿时容易打滑,特别是如果发现雨后有积水。 2. 注意。鸟击风险高,特别是在春秋两季的迁徙季节。 3. 电缆 插图:a. 10 号跑道 - 373 米/1223 英尺。b. 28 号跑道 - 374 米/1227 英尺。正常操作 - 两条电缆均已拆除。快速喷气机操作 - App 电缆已拆除,超限电缆已升起。 4. 电路 a. 方向。10 号跑道 RHC:28 号跑道 LHC。b. 高度。(i)正常 - 1100 QNH。(ii)重度 - 1600 QNH。 (iii) FJ 低空转弯 - 600 QNH。5. TKOF 后保持 Rwy Tr 直到飞过海面。6. 附加频率:Talkdown 240·05、GATA1 240·1、GATA2 355·0、APS Ops 369·45、SAR 252·8。

农历着陆系统的设计和分析
摘要:在航天器的整体设计和性能预测中,旨在完成月球上的微妙着陆时,着陆阶段的达阵动态分析是最重要的任务之一。过去的任务由于覆盖着死火山和撞击火山口覆盖的月球范围的表面而经历了降落器的倒塌,这些山口限制了降落者的光滑着陆。将来也可能出现类似的问题。工作的主要目的是确保同时六英尺触摸倾斜的地形,以使胶囊保持水平与地面平行并在着陆期间完整。当着陆器撞到地面时,部队将从地面传播到打滑垫,然后转到下腿,最后到阻尼器。然后,阻尼器吸收了着陆造成的影响。蜂窝结构通过垂直压碎来消耗施加力。在特定点上,这种力不足以进一步粉碎结构,而折断的停止,而着陆器实现了其稳定性。进行了阻尼器设计和起落架设计的模拟,以达到月球着陆稳定性。关键字:月球勘探,兰德,漫游者,支柱,蜂窝软骨阻尼器,BLDC电机简介