XiaoMi-AI文件搜索系统
World File Search System扫读

大脑成像的演变:从CT扫描到fMRI及以后。
计算机断层扫描(CT)扫描,于1970年代引入,标志着医学成像的开创性进步。由英国工程师Godfrey Hounsfield和物理学家Allan Cormack开发,CT扫描使用X射线梁创建大脑的横截面图像。这项技术比传统的X射线提供了更大的分辨率,使临床医生能够以更高的精度检测肿瘤,出血和结构异常。尽管具有优势,但CT成像的区分能力有限,并使患者暴露于电离辐射,从而促使人们寻找更安全,更详细的成像方法[2]。
战略军事视角研讨会预读
2030 年有什么新情况?控制大规模移民流动将成为一个普遍的安全问题,尤其是在城市地区。更多地区将处于临界点,导致危机的阈值将更容易被超越。由于城市人口增长迅速、气候变化加速和政治动荡,更多的人口将面临风险。移民群体的流动速度和规模将增加,从而降低控制移民的能力。多个移民流动将同时发生。移民为东道国提供了通过增加人力资本和支持人口增长来解决人口减少问题的机会。破坏性移民还会加剧政府与移民之间以及不同次国家群体居民之间的内乱。
长期军事转型研讨会预读
1 智能自主系统使用比其他系统更复杂的机制做出选择。这些机制通常类似于人类使用的机制。最终,自主系统的智能水平取决于其所做选择的质量。CHAD R. FROST,《太空自主系统的挑战与机遇》,于 2010 年 9 月 23-24 日在纽约州阿蒙克举行的美国工程前沿研讨会上发表

PPI:患者的脑信号预读 -
自动癫痫发作检测对于癫痫诊断和治疗非常重要。用于癫痫检测的一种新兴方法,即立体电脑摄影(SEEG),可以提供详细的立体脑电波信息。但是,在临床场景中对SEEG进行建模将面临挑战,例如不同患者之间的巨大领域变化和不同大脑区域之间的急剧模式演变。在这项研究中,我们提出了一个基于P的基于P的模型,以解决这些挑战,以应对这些挑战。首先,我们设计了两个新型的自我监督任务,可以从丰富的Seeg数据中提取丰富的信息,同时保留从不同大脑区域记录的大脑信号之间的独特特征。然后提出了两种技术,通道背景减法和大脑区域增强,以有效解决域移位问题。广泛的实验表明,PPI在两个公共数据集和我们收集的一个现实世界中的临床数据集上的表现优于SOTA基准,这证明了PPI的有效性和实用性。最后,可视化分析说明了两种域概括技术的合理性。
TSIA2-英语 - 艺术 - 读样品...- accuplacer
(1)《帝国书籍仓库》是镇上两个最好的书店之一,位于纳比加尼(Nabiganj),这是一个时尚的街道,是迷宫般的小巷和古老的旧勃拉姆普尔(Brahmpur)古老的杂物街区之前的现代性堡垒。(2)虽然离大学只有几英里的路程,但学生和老师的追随者比大学和联盟书店更大,距离校园仅几分钟路程。(3)帝国书籍仓库由两个兄弟(Yashwant and Balwant)经营,几乎都是英语文盲,但两者(尽管它们繁荣的圆度)如此充满活力和企业家精神,以至于显然没有任何区别。(4)他们拥有镇上最好的库存,对客户非常有帮助。(5)如果商店中没有一本书,他们要求客户本人在适当的订单表上写下其名称。
浏览和解读经济机会地图:
那么这一切意味着什么呢?如果一个县的“超出预期”(蓝色),那么该行业的机构数量就比我们的经济模型预测的多。这可能表明以下情况之一:该行业超出我们的预期,在这个县发展良好,该行业正在充当服务于邻近县的更大的区域性行业,或者该行业对于当地市场来说过度开发并面临萎缩的风险。只有运用您对该地方的实地了解后才能确定真实的情况。同样,黄色县表示机构数量比我们的模型预测的少。这可能表明以下情况之一:该行业正面临阻碍发展的当地障碍,该县的需求正在从另一个县的同一行业中抽离,或者该县尚未意识到该行业的增长潜力。
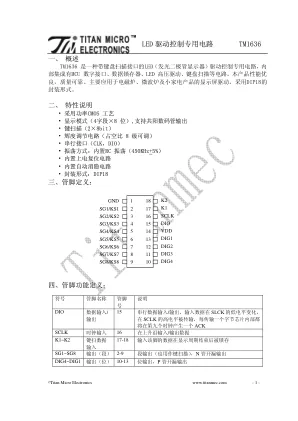
LED 驱动控制专用电路TM1636
在有按键按下时,读键数据如下: SG1 SG2 SG3 SG4 SG5 SG6 SG7 SG8 K1 1110_1111 0110_1111 1010_1111 0010_1111 1100_1111 0100_1111 1000_1111 0000_1111 K2 1111_0111 0111_0111 1011_0111 0011_0111 1101_0111 0101_0111 1001_0111 0001_0111 在无按键按下时,读键数据为: 1111_1111 ; 七、 接口说明 微处理器的数据通过两线总线接口和 TM1636 通信,在输入数据时当 SCLK 是高电 平时, DIO 上的信号必须保持不变;只有 SCLK 上的时钟信号为低电平时, DIO 上的信号 才能改变。数据输入的开始条件是 SCLK 为高电平时, DIO 由高变低;结束条件是 SCLK 为高时, DIO 由低电平变为高电平。 TM1636 的数据传输带有应答信号 ACK ,在传输数据的过程中,在时钟线的第九个 时钟芯片内部会产生一个应答信号 ACK 将 DIO 管脚拉低。 指令数据传输过程如下图(读按键数据时序):
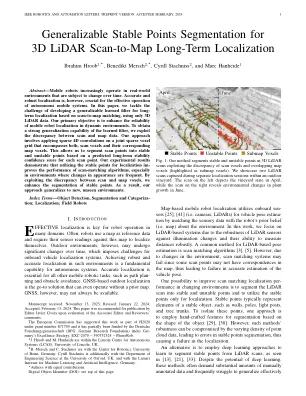
3D激光雷达扫描到地图长期定位的可推广稳定点细分
摘要 - 动物机器人越来越多地在实际会随着时间而变化的现实环境中运行。准确且健壮的本地化对于自动移动系统的有效运行至关重要。在本文中,我们仅使用3D LIDAR数据来应对基于扫描到地图匹配的长期本地化开发可推广的学习过滤器的挑战。我们的主要目标是提高动态环境中移动机器人本地化的可靠性。为了获得学习过滤器的强大概括能力,我们利用扫描和MAP数据之间的差异。我们的方法涉及将稀疏的4D卷积应用于包含扫描素及其相应地图体素的关节稀疏体素电网上。这使我们可以根据每个扫描点的长期稳定置信分数将扫描点分为稳定且不稳定的点。我们的实验结果表明,利用稳定点进行定位 - 证明了扫描匹配算法的性能,尤其是在外观变化频繁的环境中。通过利用扫描和地图体素之间的差异,我们增强了稳定点的分割。因此,我们的方法概括为新的,看不见的环境。