XiaoMi-AI文件搜索系统
World File Search System拉伸的
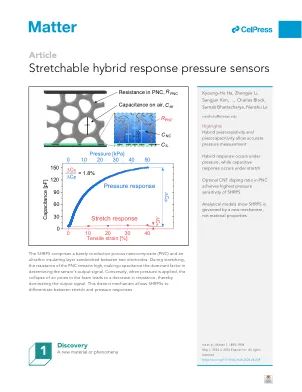
可拉伸的混合响应压力传感器
摘要触摸敏感的可拉伸电子皮肤(E金)对软机器人,假肢,生物模仿者和生物传感器保持了希望。但是,长期以来的挑战是伸展压力读数的干扰。解决此问题,我们引入了一个本质上可拉伸的杂化压力传感器(SHRP),该响应压力传感器(SHRP)由层压板组成,该层压板具有几乎没有导电的多孔纳米复合材料和位于两个可拉伸电极之间的超薄介电层。SHRP的压电和压电响应的联合压电和压电响应可以使超高压力灵敏度有效地消除拉伸诱导的干扰。我们的发现的基础是经过实验验证的电子模型。在实际应用中,安装在孔径上的shrps在人手腕上表现出安全,精确的触诊,并符合轮廓的ob o骨。SHRP的首次亮相有望显着扩大E-Skins的垂直应用。

灵活且可拉伸的光子学
摘要:传统的电子和光子设备本质上是2D,并且由于它们被捏造的底物。然而,世界并不是在流动和刺激:许多应用会从软设备和非平面几何形状中受益,例如与柔软,曲线和动态生物体的柔软,曲线和动态表面相连。此不匹配要求可机械变形(弯曲,折叠,扭曲,拉伸或压缩)的灵活和可拉伸设备,而不会损坏其有用的特性。在这里,我们提供了最先进的材料,设计,加工和设备技术的概述,这些技术是迅速发展的且可拉伸光子学的快速发展区域的概述。我们对关键的促成技术的看法将在这一领域中定义新的增长机会,因为新兴的可振奋和可伸缩的光子学的应用继续展开。

打印速度和喷嘴温度对拉伸的影响
3D 打印是一种增材制造技术,通过逐层软化热塑性长丝来快速创建 3D 模型。在使用 3D 打印技术制作物体时,有几个参数会影响打印物体的强度,包括打印速度和喷嘴温度。本研究旨在调查打印速度和喷嘴温度对使用 ABS 长丝打印产品的拉伸强度、几何形状和表面粗糙度的影响。打印速度分别为 30、40 和 50 mm/s,喷嘴温度分别为 235、245 和 255 o C。根据 ASTM D-638-02a 对打印样品进行拉伸试验。对尺寸为 30x30x40 mm 的打印样品进行表面粗糙度和几何形状测试。在垂直侧进行表面粗糙度和几何形状测试以检查层数和高度变化。结果表明,根据研究,最佳打印速度和喷嘴温度为 30 mm/s 和 255 o C,此时拉伸强度高达 33.52 MPa。

启动柔性和可拉伸的微型发行
磁性致动用于汽车抗体动力制动系统中的比例压力控制阀,以精确控制制动力。15化学执行器通过燃烧将化学能转化为机械能,从而促进汽油汽车发动机的运动。16这些驱动机制取得了巨大的成功,并在日常生活中广泛使用。然而,传统刚性和大型设备的致动机制不能直接转换为小毫米甚至微观尺度上的柔性微发频。有许多局限性,例如效率降低,微观效果的统治以及从宏到微区域缩小常规驱动概念的制造性。17 - 19因此,正在开发专门的致动机制,新颖的材料和先进的制造技术以解决这些问题。20 - 27例如,由于电磁电动机的微型化能力有限,因此无法将用于靶向药物的靶向药物治疗用于靶向药物治疗的微型机器人,因此不可能将基于电磁运动的传统电动机致动。取而代之的是,已经开发出诸如由磁性材料制成的螺旋螺旋桨等微型驱动器结构,以通过外部磁场导航微型机器人。28此外,在微创手术中,高度复杂和动态的环境需要具有较高灵活性,灵巧性和有效的力传递的微型版本。3029常规材料无法满足所有这些要求,并且已经开发出高度灵巧,微型的柔性设备,例如形状记忆合金(SMA)。

可自调和可拉伸的钙钛矿 - 弹性固体...
气体固定式摩擦式纳米生成器(GS-Tengs)为设计自动传感器设计提供了有希望的途径。然而,GS-Tengs低电输出的内在限制可能会影响传感系统的准确性和敏感性。在这里,我们通过整合具有铁电(3,3-二氟西丁基铵)2 CUCL 4 [(DF-CBA)2 CUCL 4]填充剂的胶粘剂聚(硅氧烷 - 二苯基乙二醇 - 尿氨基烷)(PSDU)弹性剂来开发多孔复合材料。psdu,一种本质上具有交替柔软的段和超分子键的底层底层负面材料,可为复合材料赋予出色的可压缩性,粘附和自我修复特性。同时,(DF-CBA)2 CUCL 4作为功能填充剂的掺入利用氢键网络的形成来增强电荷转移过程。这些填充剂通过电动波动过程有助于电荷积累,从而使功率输出的提高超过1400倍,高于基于PSDU的密集的GS-Teng。挖掘到多孔聚(硅氧烷 - 二苯基乙酰基 - 氨基甲烷) - 玻璃盐(PSDU-PK)GS-TENGS的多功能性能上,已经证明了手势/食物识别和双模式感测系统等应用,表明它们在可耐磨性的电力和智能农业中有希望的潜在潜在的潜在潜力。

基质金属蛋白酶抑制剂对微拉伸的影响...
目的:研究基质金属蛋白酶(MMPs)抑制剂在体内对自酸蚀粘合剂中树脂复合材料与牙本质微拉伸粘结强度的影响。对象和方法:研究纳入九只成年杂种犬。在狗口的上下颌(犬齿 - 第一和第二磨牙)共制备90个标准化I类腔。根据使用的MMP抑制剂类型将牙齿分为三组(n = 30):对照组(不使用MMPs抑制剂),CHX组(2%葡萄糖酸氯己定,Kempetro,ARE)和EDTA组(乙二胺四乙酸,META BIOMED,CO.LTD,韩国)。每组根据测试期6个月和12个月又分为两个亚组(n=15)。在每个测试期结束时,处死动物,然后将牙齿与颌骨分离。将每颗牙齿安装到切割机上,在水冷条件下切成一系列1mm厚的板。使用万能试验机测量每个样品的微拉伸粘结强度。将数据制成表格并进行统计分析。结果:微拉伸粘结强度结果显示,6个月后,CHX的数值明显高于EDTA,而12个月后,CHX的数值明显低于EDTA和对照组。结论:使用EDTA可提高12个月老化后的微拉伸粘结强度,而CHX和对照组的粘结强度随年龄增长而降低。

高度可拉伸的碳纳米管/聚合物热电纤维
摘要:热电(TE)技术提供了一种直接收获和转换从人体连续释放的热量的新方法。对可穿戴te发电机应用的TE材料的最大挑战与人体不断变化的形态兼容,同时又具有连续稳定的功率输出。在这里,通过改进的湿式旋转方法制备了可拉伸的羧基单壁碳纳米管(SWNT)的TEFER。即使在约30%的拉伸应力下,基于退火的羧基SWNT的稳定sebeck系数也是44μv/k。实验结果表明,当将其更改为各种形状时,文件可能会继续产生恒定的TE电位。与基于Seebeck效应的现有TE纤维相比,新的可拉伸性Tefer具有更大的塞贝克系数,并且具有更大的可拉伸性,这为将技术用于各种实用应用开放了一条途径。关键字:碳纳米管,热电材料,seebeck效果,可拉伸纤维

生理传感设备的灵活且可拉伸的有机电化学晶体管
柔性且可拉伸的生物电子学提供了电子和生物系统之间的生物相容性界面,并受到了对各种生物系统的现场监测的极大关注。有机电子中的巨大进展已使有机半导体以及其他有机电子材料,由于其潜在的机械合规性和生物相容性,用于开发可穿戴,可植入和生物相容性电子电路的理想候选者。有机电化学晶体管(OECT)作为新兴的有机电子构建块,由于离子性质在开关行为,低驾驶电压(<1 V)和高跨导能(在毫米范围内)而引起的生物传感具有显着优势。在过去的几年中,据报道,生化和生物电传感器构建富裕/可拉伸OECT(FSOECTS)方面的显着进步。在这方面,为了总结这一新兴领域的重大研究成就,本综述首先讨论了FSOECT的结构和关键特征,包括工作原理,材料和建筑工程。接下来,总结了FSOECT是关键组成部分的各种相关的生理传感应用。最后,讨论了进一步推进FSOECT生理传感器的主要挑战和机会。
使用双相式镀与印度的高度可拉伸的多层电子电路
oft和可拉伸的电子设备正在集成到下一代电子设备中,其中包括软机器人1,可穿戴电子2,生物医学设备3和人类 - 机器人界面4、5。在开发可拉伸传感器6,显示7,加热器8,储能设备9和集成电路(ICS)10的新颖材料和架构中取得了令人鼓舞的进步。但是,该领域仍然缺乏具有集成计算,有效的数据传输和微型电损失的高度可拉伸的多层电子电路。商业电子产品可以提供各种不引人注目的,廉价的,高性能的ICS,从微控制器到放大器,但是使用这些ICS创建可拉伸的电路需要每个电路元件之间的强大界面。在这项工作中,我们通过采用双相式镀机合金(BGAIN)来介绍可伸缩的印刷电路板(PCB)组件的可拉伸版本,从而创建了高度可拉伸的导电痕迹和柔软的刚性电子组件之间的耐用接口。正在积极研究三种主要策略,以实现可拉伸的电子设备:基于结构的可拉伸导体,本质上可拉伸的导体和导电复合材料。高导电性,不可延迟的薄金属膜可以几何图案化,以获得平面外变形和线性弹力10-13。尽管它们与传统的电子合并良好接触,但它们的可伸缩性和组分的面积密度通常受到限制。一种流行的方法,放置常规电子组件本质上可拉伸的导体,例如室温液体金属(Eutectic Callium-Indium,Egain 14),离子诱导器15和导电聚合物16,17-不需要复杂的图案,但每个苦难都需要复杂的,但每个遭受了几种苦难,包括几种吸水物,包括泄漏,脱落,脱何,脱何,递减,递减,递减和低电导率。导电夹杂物聚合物复合材料也可以在没有复杂图案的情况下拉伸,但通常患有最大菌株和高电阻18、19。此外,在菌株20、21期间,关于可拉伸导体的报告相对较少。已经大力努力在可伸缩零件和市售的高性能ICS之间建立可靠的连接。

由钡六铁氧体纳米粒子制成的可丝网印刷且可拉伸的硬磁墨水
可拉伸电子产品在医学、传感和机器人领域的应用越来越受到关注。当前的可拉伸材料要么是本质上可拉伸的,要么是图案化为可拉伸结构,要么是通过形成某种可拉伸材料和具有某些所需特性(例如高导电性)的刚性材料的复合材料而制成的。然而,文献中缺乏可拉伸磁性材料,而将可拉伸性和磁性相结合的设备仅限于使用串行制造工艺,例如将毫米级磁体嵌入聚合物基质中。在这项研究中,我们介绍了一种可拉伸复合硬磁墨水,该墨水由钡六铁氧体纳米颗粒与 9510 单组分环氧灌封化合物和二(丙二醇)甲醚混合而成。然后使用丝网印刷方法,将该墨水用于制造磁应变传感器,作为材料和工艺的概念验证。结果表明,可以制成一种可拉伸的硬磁墨水,其由钡六铁氧体颗粒夹杂物提供 20 kA/m 的剩磁,并由环氧树脂提供至少 100% 应变的拉伸性。