XiaoMi-AI文件搜索系统
World File Search System拉伸的
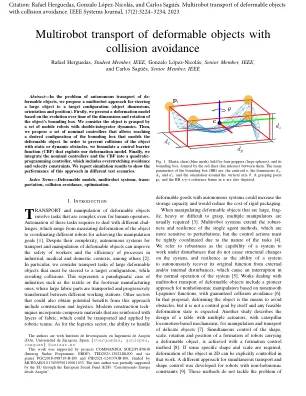
避免碰撞的可变形物体的多动物传输
摘要 - 在自动运输可塑造对象的问题中,我们提出了一种多机器人方法,将大对象转向目标配置(对象维度,方向和位置)。首先,我们基于对象边界框的尺寸和旋转时间的演化提出了一个变形模型。我们认为该对象是由一组带有双积体动力学的移动机器人抓住的。然后,我们提出了一组名义控制器,允许达到建模可变形对象的边界框的所需配置。为了防止对象与静态或动态障碍物的碰撞,我们制定了利用我们变形模型的控制屏障函数(CBF)。最后,我们将标称控制器和CBF集成到二次编程控制器中,其中包括过度拉伸的回避和速度约束。我们报告模拟结果,以显示在不同的测试方案中这种方法的性能。

使用土工格里德对混凝土的某些特性的影响
地理植物是由聚乙烯,聚酯和聚丙烯等聚合物制成的地质材料。它们通常在土木工程应用中使用,以提供土壤拉伸的加固。地理植物用于建造基础,挡土墙,路边和陡峭的斜坡。它们由柔性网稳定在固定壁后面的土壤以产生增强的相干质量。结构由两对肋骨组成,这些肋骨在两个不同的方向上交叉。一组肋骨平行于机器的方向,而第二组(称为跨机动方向)垂直于机器的方向。取决于纵向和对角线肋骨的排列方式,孔(肋骨之间的空间)的范围从150到250毫米。肋骨具有通常大于肋骨并通过粘结,交织或挤出连接的孔或孔(Yousif等,2021)。

PERFORMAX™ 4388
增强弹力织物的压缩力 Performax ™ 4388 是一种可拉伸的水性化合物,具有出色的拉伸恢复性、耐磨性、柔韧性和柔软度平衡,可增强塑身衣、牛仔服、瑜伽裤、矫形织物和其他要求严苛的应用中使用的弹力织物的压缩力。这种即用型聚氨酯涂层可形成柔软、有弹性的薄膜,对棉、涤纶、尼龙及其混纺等多种基材有出色的附着力。Performax 4388 可使用所有传统技术进行涂覆,例如刮刀、迈耶棒、轮转丝网和凹版印刷,以及精密喷涂和功能性数码印刷方法。根据性能要求,可涂覆单层或多层化合物涂层,以达到所需的性能水平。

生物素化的双链/单链DNA杂交(17,853 nt)
•保持通道的流量1-3打开,并在〜2.5μm和6μm之间移动陷阱1,以确定是否形成了系绳,通过观察力响应。对于单个系绳,测得的FD曲线遵循双链DNA的蠕虫样链模型,轮廓Lenght为17.853 bp,并且在60 Pn处具有过度拉伸的高原。双重系数显示,距离较短的力响方面的发作将使高原过高的高原。双 - 毛线可以通过增加珠子之间的距离而打破,但是,也可能发生Tethers(部分)转换为杂种,而不是导致单个常规的Tethers。如果经常捕获多个系数,则可以降低注射器中的DNA浓度。
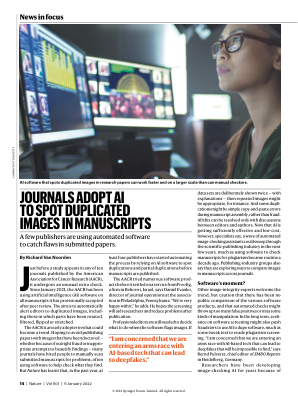
期刊采用 AI 来发现重复图像...
在一项研究发表在美国癌症研究协会 (AACR) 出版的十种期刊中的任何一种之前,它都要接受一项不寻常的额外检查。自 2021 年 1 月以来,AACR 一直在同行评审后对其暂时接受的所有手稿使用人工智能 (AI) 软件。目的是自动提醒编辑注意重复的图像,包括部分图像被旋转、过滤、翻转或拉伸的图像。AACR 是可能成为一种趋势的早期采用者。为了避免发表带有被篡改图像的论文——无论是由于彻头彻尾的欺诈还是不恰当的美化发现的尝试——许多期刊都雇人手动扫描提交的手稿以查找问题,通常使用软件来帮助检查他们发现的内容。但《自然》获悉,在过去的一年里,

可拉伸、可生物降解的植物基氧化还原扩散电池
治疗,并实现新的消费者可穿戴技术,如电子皮肤、电子纺织品和软机器人。2 与身体保形和不可察觉集成的先决条件是需要柔软且可拉伸的电子设备。这些设备包含多个电气元件来执行复杂的功能,并且已经取得了进展以实现其在操作过程中的可拉伸性,但它们通常设计用于容纳刚性和笨重的电池组件。3–5 集成可拉伸紧凑的电池将缓解这个问题。然而,增加现有可拉伸电池设计中的氧化还原活性材料含量通常会导致电极更硬且可拉伸性更低。6–8 此外,它们主要基于不可持续的过渡金属氧化物活性材料、不可生物降解的石油基弹性体(有机硅、苯乙烯嵌段共聚物等)和集电器中昂贵的导电金属纳米填料(金、银等)。9
绿色融资框架2025年1月
berger电电变电站在奥斯陆郊区(包括Billingstad Industrial地区)提供了Asker市政当局的东部。工业区的部分已从工业用途转换为住房。为了满足当地行业和人口增加的需求,我们将变形金刚的容量从100增加到120 MVA。电压水平从47 kV升级到132 kV,旧的室外设备正在新建筑物中的新型132 kV气体绝缘开关柜取代。该项目将于2001年连接到从Hamang到Berger的5公里长的132 kV电缆,该电缆以前以47 kV的速度和同一拉伸的高架线一起运行。现在,随着升级,电缆将在132 kV中使用,并且可以拆除旧的高架线。从47 kV升级到132 kV也将减少传输损失。总预期投资为13400万。
使用遗传算法的电源系统的最佳设计
本文提出了一种基于用于设计牵引力供应系统的遗传算法的优化模型。所提出的模型既适合计划新线路,也适用于扩展旧线路,从而导致更有效的运营以及较低的投资成本。最小化固定安装代表了搜索某些技术约束的创新设计的优化标准:变电站中最大的电压下降和最大功耗。优化问题所涉及的变量是:铁路架空线的数字,类型和位置;以及牵引力变电站的数字,大小和位置。最后,对可能设计的评估涉及研究的铁路拉伸的简化电气建模。因此,电气模拟和计算也已适应其在遗传算法中的实现。马德里 - 巴塞罗那高速线的一部分被认为是研究案例,以分析拟议模型的性能。的结果揭示了通过提出的模型及其善良和鲁棒性获得的新设计的适用性。关键字:铁路,电源系统,优化,遗传算法。

通过多相夹杂物实现可拉伸有机硅的均匀导电性
许多软机器人组件需要高度可拉伸的导电材料才能正常运行。这些导电材料通常用作传感器或热响应材料的加热器。然而,可拉伸材料很少,它们可以承受软机器人通常经历的高应变,同时保持焦耳加热所需的电气特性(例如,均匀的电导率)。在这项工作中,我们提出了一种含有液体和固体夹杂物的硅树脂复合材料,它可以在经历 200% 的线性应变时保持均匀的电导率。这种复合材料可以铸造成薄片,使其能够包裹在热响应软材料周围,这些软材料在加热时会增加体积或可拉伸性。我们展示了这种材料如何为电控形状变化的软机器人致动器以及仅由电刺激驱动的全硅树脂致动系统开辟可能性。此外,我们还表明这种可拉伸复合材料可用作其他应用中的电极材料,包括线性响应高达 200% 应变且信号噪声接近于零的应变传感器。

原位纳米透射机械实验揭示了si纳米线中的延性过渡的脆性
硅纳米结构已在现代微电子学中广泛使用。微电芯片中不断增加的整合密度不可避免地导致Si纳米结构的明显温度升高,这是承受大量热应力所必需的,以维持其适当的功能。si纳米结构也是许多新型纳米技术应用的基础,包括能量收集和存储,灵活且可拉伸的电子设备,传感器和纳米机械系统。[1]这些应用的可靠性问题要求对升高温度下的Si纳米结构的机械行为有基本的了解。在这里,我们报告了在RT至600 K的温度范围内单晶Si NWS的原位拉伸测试。[2]我们采用新开发的微电力系统(MEMS)[3-6]来进行透射电子显微镜(TEM)内的纳米热测试。该平台允许在不同温度下同时对原子尺度变形的TEM成像进行应力 - 应变测量。[2,7]基于MEMS的平台内置了一个片上加热器,从而使样品的受控加热。