XiaoMi-AI文件搜索系统
World File Search System拾取

喷墨打印电子包装的比较可靠性
基于喷墨的微电子制造系统通常具有多个打印头,可以使用银导电轨道图案的丙烯酸绝缘层沉积。选择系统允许在印刷结构中集成主动和被动组件。可以通过采用模块化方法,整合三维喷墨打印,拾取和位置,材料分配[2],3D检查[3]和基于条件的监测[4-7]过程来增强制造系统的灵活性。添加剂制造系统可以在非常快速的过程中在单个机器上形成多种微电子包。在几个小时内从CAD设计过渡到功能产品的能力可以深刻地改变公司如何处理商业可销售产品的原型制作和开发。
FA-YOLO:基于FMD和AGMF模块的有效特征选择的研究YOLO改进了算法
摘要 - 随着全球电子商务的快速增长,物流行业对自动化的需求正在增加。这项研究的重点是仓库中的自动采摘系统,利用深度学习和强化学习技术来提高选择效率和准确性,同时降低系统故障率。通过经验分析,我们证明了这些技术在改善机器人拾取性能和对复杂环境的适应性方面的有效性。结果表明,集成的机器学习模型极大地胜过传统方法,有效地应对峰订单处理的挑战,减少操作错误并提高整体物流效率。另外,通过分析环境因素,本研究进一步优化了系统设计,以确保在可变条件下的高效和稳定的操作。这项研究不仅

pokerrt:戳戳作为平面非划痕操纵的技巧和失败恢复策略
摘要 - 在这项工作中,我们介绍了Pokerrt,这是一种新颖的运动计划算法,该算法证明了戳记是一种有效的非纹章操纵技巧,以实现快速操纵对象并增加机器人可及工作空间的大小。,我们将戳戳作为一种失败恢复策略,在挑选和地位最初失败或无法实现的情况下,与拾取和位置协同使用。我们的实验证明了拟议框架在计划对象进行调查中使用戳戳操纵在整洁和混乱的环境中的效率。除了定量和定性地证明了Pokerrt对模拟和现实世界中不同方案的适应性外,我们的结果还表明,在成功率和任务时间方面,戳戳而不是推动和抓住的优势。
R22 M.Tech. 机器人与人工智能 JNTUH
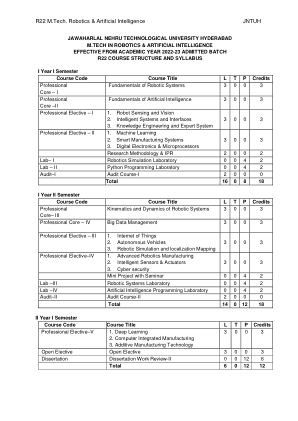
机器人系统基础单元 - I 简介:机器人解剖学 - 定义、机器人定律、机器人的历史和术语 - 机器人的准确性和重复性 - 简单问题 - 机器人的规格 - 机器人的速度 - 机器人关节和链接 - 机器人分类 - 机器人系统架构 - 机器人驱动系统 - 液压、气动和电气系统。单元 - II:末端执行器和机器人控制:机械夹持器 - 曲柄滑块机构、螺旋式、旋转执行器、凸轮式 - 磁性夹持器 - 真空夹持器 - 气动夹持器 - 夹持力分析 - 夹持器设计 - 简单问题 - 机器人控制 - 点对点控制、连续路径控制、智能机器人 - 机器人关节控制系统 - 控制动作 - 反馈装置 - 编码器、解析器、 LVDT - 运动插值 - 自适应控制。第三单元:机器人变换和传感器:机器人运动学 - 类型 - 2D 和 3D 变换 - 缩放、旋转、平移 - 齐次坐标、多个变换 - 简单问题。机器人中的传感器 - 触摸传感器 - 触觉传感器 - 近距离和范围传感器 - 机器人视觉传感器 - 力传感器 - 光传感器、压力传感器。第四单元:机器人单元设计和微/纳米机器人系统:机器人工作单元设计和控制 - 序列控制、操作员界面、机器人中的安全监控设备 - 移动机器人工作原理、使用 MATLAB 进行驱动、NXT 软件介绍 - 机器人应用 - 材料处理、机器装卸、装配、检查、焊接、喷漆和海底机器人。微/纳米机器人系统概述-缩放效应-自上而下和自下而上的方法-微/纳米机器人系统的执行器-纳米机器人通信技术-微/纳米夹持器的制造-爬壁微型机器人的工作原理-仿生机器人-群体机器人-纳米机器人在靶向药物输送系统中的应用。单元 - V:机器人编程-介绍-类型-柔性吊坠-引导编程,机器人坐标系统,机器人控制器-主要组件,功能-腕部机构-插值-联锁命令-机器人的操作模式,慢跑类型,机器人规格-运动命令,末端执行器和传感器命令。机器人语言-分类,结构-VAL-语言命令运动控制,手动控制,程序控制,拾取和放置应用,使用 VAL 的码垛应用,使用 VAL 程序的机器人焊接应用-WAIT、SIGNAL 和 DELAY 命令使用简单应用程序进行通信。 RAPID-语言基本命令-运动指令-使用工业机器人进行拾取和放置操作-手动模式、自动模式、基于子程序命令的编程。移动-主命令语言-介绍、语法、简单问题。VAL-II 编程-基本命令、应用程序-使用条件语句的简单问题-简单的拾取和放置应用程序。
糖尿病治疗的新型药物
该主题分析强调了与DPP-4抑制剂,SGLT2抑制剂和GLP-1受体激动剂有关的错误,发生在社区药房环境中,并共享选定的安全提示。主要考虑因素包括修改与外观类似产品名称的药学软件显示,在药房过程中实施条形码扫描技术,组织冰箱空间,以确保产品和单个处方的分离和可见性,以及在处方拾取的患者中审查标签说明以确保患者期望获得的信息匹配。基于社区的团队,包括处方者,护士,药剂师和药房技术人员,还鼓励审查自己的事件,除了从该分析中学习,以指导改善其药物使用过程。


有关智能控制系统的评论论文,以提高机器人臂的速度
新数字世界中创新的快速发展以及信息,通信和网络物理技术的不断增长已经修改了现代制造,尤其是在行业4.0的背景下[1]。许多制造行业都采用许多尖端技术。在制造业中获得吸引力的一项技术是机器人手臂操纵器。该技术的利用旨在提高效率和生产力。性能和生产的增加是由于机器人组的速度和精度提高了[2]。在过去的30年中,机器人在工业,医学,军事领域和农业中越来越广泛使用[3]。目前,对在农业中使用机器人和自动化技术的使用进行了许多研究,包括种植,喷涂,监测,播种,养育和收获是迈向农业工业化的重要步骤。自动收获机器人技术已成为数字农业最重要的关键部分之一[4]。用一贯的自动化过程代替耗时和劳动密集型的手动采摘任务将导致人类劳累的减少,最终提高了现场生产率。可以通过利用机器人收割来实现这一目标,该机器人收获涵盖了机器人臂,机制和软件系统。尽管如此,如果控制策略的设计不足,则可能导致农业生产损失。[5]。来自世界各地的研究人员已经对不同的蔬菜和水果进行机器人采摘进行了许多研究,例如番茄采摘机器人,草莓拾取机器人,西瓜拾取机器人和莴苣拾取机器人[6]。与采摘机形成鲜明对比的是,这些采摘机器人更加自动化和更聪明。他们已经完成了挑选目标的基本过程,使人们摆脱了繁重的劳动。尽管如此,我们需要智能控制和智能算法来加快机器人的臂,以高精度地收获农作物。本文详细概述了与收获操作器控制问题有关的过去和当前研究。本文的目的是了解控制系统的方法以及通过确定已采取的措施来提出创新控制方法来弥合本文已发表文献中观察到的知识差距的方法,从而将其分为三个主要部分。第一部分集中于农业收获机器人;第二部分是关于深度学习和视觉控制,第三部分是关于运动计划(运动计划)。概述了世界面临的几个挑战,包括COVID-19大流行,人口增长,气候变化和减少粮食生产,这是世界面临的几个挑战。在大流行期间,粮食生产的设施停止了生产,导致世界部分地区的恐慌。尽管令人担忧,但通过提供解决方案的科学技术进步可以减轻许多担忧,尤其是粮食不安全。人口增长进一步加剧了这种粮食不安全问题,在2050年需要将粮食生产增加一倍,以养活世界上100亿的人口。传感器技术,自动化和机器人技术在技术上都在发展[7]。随着智能制造的持续开发以及机器人的不断扩展应用,机器人在越来越复杂的环境中部署,机器人的性能要求变得越来越

开放GTEM细胞用于EMC预遵从性测试
GTEM电池是一种锥形的杂种终止50欧姆条带装置,用于辐射排放和电子设备的免疫测试。这不是一个替代品,但由于其大小和成本,它是态室内测量的方便替代品。一个GTEM电池由隔膜组成,中间的导电带和连接到地面的墙壁。几何形状旨在呈现50Ω条线。测试的设备(DUT)放在底壁和隔膜之间。TBGTC1是一个“开放式GTEM单元”,没有侧壁,可方便地放置DUT和优选的垂直配置。它可能会拾取RF背景噪声,但是可以通过对DUT供电或将GTEM-Cell放在屏蔽帐篷中之前对电池输出信号进行测量来考虑,这也可以从Tekbox获得。

基于视觉的语音控制机械臂用于处理...
摘要: - 该项目概述了基于视觉的语音控制机器人系统,该系统涉及牙科工具,旨在提高牙科服务的质量和卫生。使用带有网络摄像头的 Raspberry Pi 上的 OpenCV 和带有麦克风的 Google Speech API 进行语音识别,实现实时计算机视觉。机器人知道需要哪种牙科器械,并在牙医要求时自行拾取牙科器械,从而最大限度地减少接触。该应用程序还通过提供工具的实时视觉反馈来改善与工具相关的工作条件,包括准确定位和握持工具。这种方法增强了仪器的可达性,提高了清洁度,并使牙科手术能够持续进行而不会频繁中断。
印度理工学院鲁尔基分校
部门/中心名称:地震工程系 科目代码:EQO-101 课程名称:地震安全 LTP:2-1-0 学分:03 学科领域:OEC 课程大纲:板块构造 - 大陆漂移,各种板块边缘的类型和特征,地震目录和地球地震活动,世界大地震,重要印度地震,地震拾取器理论(地震仪,加速度计);无阻尼和阻尼,自由和受迫振动,稳态和瞬态响应,响应,响应谱概念,设计谱,模态,振型和模态分析,地震响应分析;强度、超强度和延展性概念,等位移和等能量原理概念,容量设计,不规则建筑物的抗震设计考虑;加速度和漂移敏感组件,地板加速度,建筑物高处安装设备的锚固力。