XiaoMi-AI文件搜索系统
World File Search System接收机

调频发射机/接收机测试方法
显示 R 1 = 75Ω R a = 50Ω 的情况。 R 2・R 3:耦合电路的电阻 E:SG 输出电压 dBμ V 测试设备的输入信号电平:E-6 [dBμ V]
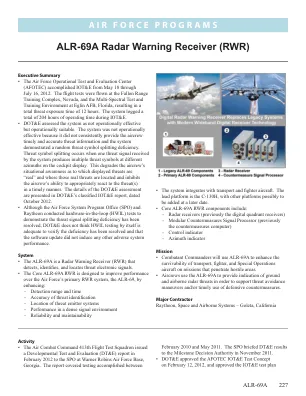
ALR-69A 雷达预警接收机 (RWR)
执行摘要 • 空军作战测试与评估中心 (AFOTEC) 于 2012 年 5 月 18 日至 7 月 16 日完成了 IOT&E。飞行测试在内华达州 Fallon Range 训练中心和佛罗里达州 Eglin 空军基地的多光谱测试与训练环境中进行,总威胁暴露时间为 12 小时。该系统在 IOT&E 期间总共记录了 204 小时的运行时间。 • DOT&E 评估该系统在操作上不有效但操作上适用。该系统在操作上无效,因为它无法持续及时准确地向机组人员提供威胁信息,并且系统表现出随机威胁符号分裂缺陷。当系统接收到一个威胁信号并在驾驶舱显示器上以不同的方位角产生多个威胁符号时,就会发生威胁符号分裂。这会降低机组人员对显示的威胁是“真实”的以及这些真实威胁位于何处的态势感知能力,并抑制机组人员及时对威胁做出适当反应的能力。 DOT&E 评估的详细信息在 DOT&E 2012 年 10 月的机密 IOT&E 报告中介绍。• 尽管空军系统计划办公室 (SPO) 和雷神公司进行了硬件在环 (HWIL) 测试以证明威胁信号分离缺陷已得到解决,但 DOT&E 并不认为 HWIL 测试本身足以验证缺陷已得到解决,并且软件更新不会引起任何其他不利的系统性能。

加压体积太阳接收机的进步
摘要。 div>&rquhqwudwhg vrodu srzhu&63 kdv wkh srwhqwldo iru k \ eulgl] dwlrq zlwk zlwk jhrwkhupo hqhuj \ wr wr wr wr lpsuryh wkh wkh wkh wkh wkh wkh wkhupdo hilrflo hilrfllfllfllfllfllflhqf \ ri ri jhrwkhupdo sodqwv dqg khos fripdw folpdw fkdqjhh e \ xwlol] lqj uhqzdeoh hqhuj \ vrxufhv 7kh vrodu uhfhlyhu lv dq dq lpsruwdqw frpsrqhqw lq dq&63 v \ vwhp 7kxv wkh ghvljq ri wkh uhfhlyhu pxvw eh frqvlghuhuhgg dqg rswlpl] hg wr pd [lpl] h wkh hiilflhqf \ ri wkh v \ vwhp 7klv sdshu uhylhzv suhvxul] hg yroxphwulf vrodu uhfhlyhuv wr sucylgh dq ryhuylhz ri wkh fxuhqw uhvhufufk lq $ 395 RQ WKH WKHRUHWLFDO DQDO \ vlv ri Uhfhlyhuv frpsduhg wr hh [shulphqwdo whvwlqj 5hfhlyhu surwrw \ shv zhuh whuh whuh whv zhuh whvwhvwhgwhvwhg xqghu vrodu vrodu vrodu udgldwlrq udgldgldwlrq ru vrodu vlpxdwru frqlwlrqv 7kh wkhupdo hiilflhqf \ ri 395 ydulhv iurp zkloh wkh wkh rxwohw dlu whpshudwxuh ydulhv iurp&6rph vwxglhv dovr ydolgdwhg wkh wkhruhwlfo prghov xvlqj h [shulphqwdo gdwd wr wr ghuplqh wkh wkh dfxudf \ ri wkh uhvxowv 7kh lpsurwddhfh ri wkh uhylhz ilqlqjv lv lv wkdw wkh \ ghprqvwudwh wkdw wkh dgydqfhv lq qxphulfdo prghoolqj ri 395 du du du du du du du du du du du du d du d duh dufxudwh hqrxjk wr eh eh eh frpsDudeOh wr wkh uhvxowv rewdlqhg e \ h: lv uhfrpphqgg wr txdqwli \ wkh euhdnhyhq srlqw ri wkh frpsxwlqj frvw ri 395 prgholqj div div div>
免费接收机的最低要求... - ITU
[5] ETSI TS 102 992 V1.1.1,数字视频广播 (DVB);用于 DVB-T2 第二代数字地面电视广播系统的可选发射机签名(T2-TX-SIG)的结构和调制;


国家飞机军用 GNSS 接收机合规性...
处理 GPS PPS 信号的 GNSS 接收器包含政府提供的设备 (GFE) 元素,相关文件不允许直接证明符合民用要求(例如EASA ETSO-C196)。尽管如此,从基于性能的指标得出的民用要求允许考虑比例感,因此可以应用可以证明接收器性能等效合规性的方法,同时将 GFE 元素视为“黑匣子”。从这个意义上讲,根据民用标准(RTCA DO-178B / EUROCAE ED-12B;DO-254 / ED-80)进行的设计保证也必须在比例原则的基础上进行。
机载脉冲干扰环境模拟器...
2 未来GNSS信号和接收机结构 3 2.1 未来GNSS信号 ......................。。。。。。。。。3 2.1.1 GPS L5 信号。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。3 2.1.2 伽利略信号。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。4 2.2 GNSS接收机结构 ......................。。。。。6 2.2.1 天线 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。7 2.2.2 前置放大器。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。7 2.2.3 前端 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。7 2.2.4 ADC/AGC 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。7 2.2.5 硬件和软件信号处理。。。。。。。。。。。。。。。7 2.2.6 导航处理。。。。。。。。。。。。。。。。。。。。。。。。。。8
要素 1 2024 年工作计划
创新/任务描述:该活动将涵盖因子图优化的应用,以改善不同用户场景中基于传统 KF 的解决方案和模糊度解析获得的性能,特别是:a) 当利用不同接收机等级(从高端到低质量/大众市场智能手机/物联网应用的接收机)的 GNSS 可观测量时,并且没有其他传感器的数据;b) 当用于将 GNSS 与其他传感器(不同类型和等级,包括但不限于惯性传感器)集成时;以及 c) 在不同用户条件下,包括城市和室内环境中典型的恶劣传播场景。所提供的好处将根据真实的现场测量活动和来自商业/大众市场接收机的可观测量进行评估。

采用混合相移方案的 56 至 66 GHz CMOS 低功耗相控阵接收机前端
摘要 — 本文介绍了一种体积小、功耗低的毫米波相控阵接收机前端。本振 (LO) 和射频 (RF) 相移方案相结合,用于降低功耗和 RF 路径损耗。此外,在有源电路的实现中,采用了体隔离技术,以最少的级数实现更高的功率增益。该技术还用于 RF 路径移相器开关以减轻损耗。为了验证所提出的架构,采用 65 nm 体 CMOS 工艺制造了一个单元件 56 至 66 GHz 相控阵接收机前端。根据测量结果,接收机实现了 ∼ 14.85 dB 的功率增益和 5.7 dB 的最小噪声系数 (NF)。测得的平均 RMS 相位和增益误差分别为 ∼ 3.5 ◦ 和 ∼ 0.45 dB。接收器链的输入 1dB 压缩点 (P − 1dB ) 约为 − 19 dBm。完整的接收器(包括有源平衡-不平衡转换器和所需缓冲器(不包括 LO))在 1 V 电源下消耗约 50 mW 功率,不包括焊盘,占用硅片面积为 0.93 mm 2 。
GPS 简介
3 GPS 误差和偏差 ...................27 3.1 GPS 星历表误差 .....................28 3.2 选择性可用性 ......................29 3.3 卫星和接收机时钟误差 ..............31 3.4 多路径误差。...................32 3.5 天线相位中心变化。..............34 3.6 接收机测量噪声。................35 3.7 电离层延迟 ....................36 3.8 对流层延迟 ..................38 3.9 卫星几何测量 .................39 3.10 GPS 任务规划 ..................42 3.11 用户等效范围误差 ..............44 参考文献 · · · · · · · · · · · · · · · · · · · · · · · 44