XiaoMi-AI文件搜索系统
World File Search System控制框架
集团税务策略
集团税务策略 本集团税务策略发布的会计期间为 2024 年 1 月 1 日至 12 月 31 日。集团的税务策略以及支撑该策略的治理和合规框架基于根据相关法律在适当的时间缴纳正确税额的意图。集团承认其对股东负有尽量减少税务负担的责任,但也应以符合其更广泛的战略目标、价值观和责任的方式做到这一点。要求公布税务策略的立法包含在《2016 年财政法》附表 19 第 2 部分第 23 节中。 税务风险管理 集团在业务中以低水平的可接受税务风险运营。集团首席财务官是集团指定的高级会计官 (SAO),负责税务治理并让董事会了解重大税务事项。税务策略由管理集团运营和交易的标准、政策、程序和系统的内部控制框架支持。集团聘请了一名税务经理,所有财务交易均由中央财务团队处理,该团队拥有适合其角色和业务性质的经验、资格和培训。税务规划集团不实施任何避税计划,也不参与任何形式的激进税务规划。所有收入、利润、就业和税收均在英国记录。

集成路径以下和分布式驱动器自动驾驶无人车辆的横向稳定性控制
摘要:智能化是未来汽车行业的发展趋势。智能设备要求车辆的动态控制可以根据决策计划的轨迹输出来完成轨迹跟踪,并确保车辆的驾驶安全性和稳定性。但是,紧急情况引起的轨迹限制规划和严格的道路条件将增加轨迹跟踪和无人车辆稳定控制的困难。鉴于上述问题,本文研究了分布式驱动器无人车辆的轨迹跟踪和稳定性控制。本文应用了分层控制框架。首先,在上部控制器中,提出了算法后的自适应预测时间线性二次调节器(APT LQR)路径,以考虑轮胎的动态稳定性性能,以获取所需的前轮驱动角度。DDAUV的横向稳定性是基于相位平面确定的,在改进的滑动模式控制(SMC)中,滑动表面进行进一步调节,以获得所需的额外偏航矩,以协调路径后跟随和横向稳定性。然后,在下部控制器中,考虑到四个轮胎的滑动和工作负载,建立了全面的成本功能,以合理地分配四个轮毂电动机(IWM)的驾驶扭矩,以生成所需的额外偏航矩。最后,建议的控制算法通过硬件(HIL)实验平台验证。结果显示了以下路径,并且在不同的驾驶条件下可以有效地协调横向稳定性。
无人机自动着陆系统集成了野生环境中的定位,跟踪和降落
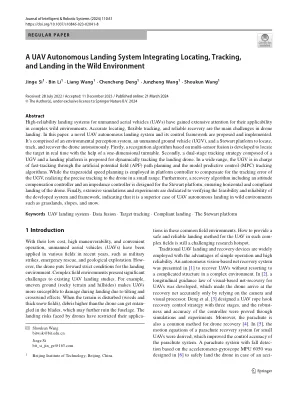
无人驾驶汽车(UAV)的抽象高可利用性着陆系统已广泛关注它们在复杂的野生环境中的适用性。准确的定位,灵活的跟踪和可靠的恢复是无人机着陆的主要挑战。在本文中,提出并实施了一个新型的无人机自动着陆系统及其控制框架。它由环境感知系统,无人接地车辆(UGV)以及斯图尔特平台定位,跟踪和自动恢复无人机。首先,开发基于多传感器融合的识别算法是为了借助一维转盘实时定位目标。其次,提出了由UGV和着陆平台组成的双阶段跟踪策略,以动态跟踪着陆无人机。在广泛的范围内,UGV负责通过人工电位场(APF)路径计划和模型预测控制(MPC)跟踪算法进行快速跟踪。虽然在平台控制器中采用了梯形速度计划来补偿UGV的跟踪误差,但在较小范围内实现了对无人机的精确跟踪。此外,一种恢复算法,包括姿态补偿控制器和阻抗控制器,是为Stewart平台设计的,可确保无人机的水平和合规降落。最后,广泛的模拟和实验致力于验证开发系统和框架的可行性和可靠性,这表明它是在野生环境(例如草原,斜坡和雪)中无人用自动降落的卓越案例。
使用大语言模型的实时异常检测和反应性计划
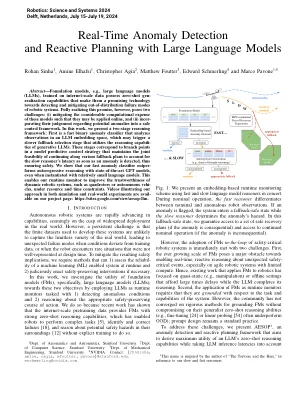
摘要 - 在Internet规模数据上接受培训的大型语言模型(LLMS)具有零拍摄的一代化功能,这使它们成为一种有前途的技术,用于检测和缓解机器人系统的分布故障模式。完全意识到这一诺言提出了两个挑战:(i)减轻这些模型的大量计算费用,以便可以在线应用它们,以及(ii)将他们对潜在异常现象的判断局限于安全控制框架。在这项工作中,我们提出了一个两阶段的推理框架:首先是一个快速的二进制异常分类器,可以分析LLM嵌入空间中的观察结果,该观察结果可能会触发较慢的后备选择阶段,该阶段利用了生成LLMS的推理。这些阶段对应于模型预测控制策略中的分支点,该策略保持了沿着各种后备计划继续沿着各种后备计划的联合可行性,以便在检测到异常后立即考虑缓慢的潜伏期,从而确保安全性。我们表明,即使使用相对较小的语言模型实例化,我们的快速异常分类器与最先进的GPT模型形成了自回归推理。这使我们的运行时监视器能够在资源和时间限制下改善动态机器人系统的可信度,例如四摩托或自动驾驶汽车。在我们的项目页面上可以使用仿真和现实世界实验中说明我们方法的视频:https://sites.google.com/view/aesop-llm。

在两个新颖的广义版本的diffie-hellman钥匙交换
[1] Merkepci,M。和Abobala,M。,“基于精致的中性粒细胞整数融合和El Gamal算法加密不确定的有理数据单元的安全模型”,融合:实践和应用,2023.[2] Merkepci,M。和Abobala,M。,“在一些有关分裂复杂数字,对角度问题以及对公共密钥非对称密码学的应用的新结果”,《数学杂志》,Hindawi,2023年,2023年,2023年,[3] S. A. Aparna J R,“使用Diffie Hellman Key Exchange的图像水印”,在国际信息与通信技术会议上,印度高知,2015年。[4] https://www.bsi.bund.de/en/themen/unternehmen-und-organisationen/informationen/informationen-empfehlungen/ki-in--in--in--in--in--in-der-krypptogrie-最后一个徒步旅行:6/17/2024。[5] Abobala,M。和Allouf,A。,“针对2×2模糊矩阵进行加密和解密的新型安全计划,其基于中性嗜性整数和El-Gamal Crypto-System的代数的合理条目和合理条目”[6] Merkepci,M.,Abobala,M。和Allouf,A。,“融合中性粒细胞学理论在公共密钥密码学中的应用以及RSA算法的改进”,融合:实践和应用:2023.[7] Abobala,M。,(2021)。中性粒数理论的部分基础。中性嗜性套装和系统,第1卷。39。[8] Hasan Sankari,Mohammad Abobala,“使用2个循环精制整数对RSA加密系统的概括”,《网络安全与信息管理杂志》,第1223卷,2023年。[10] Kumar,S。,&Ojha,P。K.(2020)。(2024)。(2024)。[9]穆罕默德·阿巴巴拉(Mohammad Abobala),哈桑·桑卡里(Hasan Sankari)和穆罕默德主教Zeina,“基于基于2个环保精制整数的新型安全系统以及2-Cyclic精制数字理论的基础”,《模糊扩展与应用杂志》,第2024页。“使用模糊逻辑和矩阵操纵的新型加密算法。”信息安全与应用程序杂志,54,102565。doi:10.1016/ j.jisa.2020.102565。[11] Shihadeh,A.,Matarneh,K。A. M.,Hatamleh,R.,Hijazeen,R。B. Y.,Al-Qadri,M。O.,&Al-Husban,A。基于中性粒子实数的两个模糊代数的示例。中性嗜性套装和系统,67,169-178。[12] Abdallah Shihadeh,Khaled Ahmad Mohammad Matarneh,Raed Hatamleh,Mowafaq Omar al-Qadri,Abdallah al-Husban。在2≤3的两倍模糊N型中性粒子环上进行了2≤3。中性粒子集和系统,68,8-25。[13] Al-Husban,A.,Salleh,A。R.,&Hassan,N。(2015)。复杂的模糊正常亚组。在AIP会议上(第1卷1678,编号1)。AIP出版。[14] Abdallah al-Husban&Abdul Razak Salleh 2015。复杂的模糊环。第二届国际计算,数学和统计会议论文集。页。241-245。发布者:IEEE2015。[15] Roy,S.,Pan,Z.,Abu Qarnayn,N.,Alajmi,M.,Alatawi,A.,Alghamdi,A.(2024)。一个可靠的最佳控制框架,用于控制食管癌中异常RTK信号通路。数学生物学杂志,88(2),14。(2023)。[16] Roy,S.,Ambartsoumian,G。和Shipman,B。最佳控制框架,用于建模前列腺癌中的动力学和雄激素剥夺疗法(博士学位论文)。

在无车道自动流量中建模车辆植入车辆
摘要在无车道的交通中,车辆可以选择任何任意的横向位置。这使车辆群可以在数量上进行组合,不仅在纵向上而且侧向进行较小的空间缝隙,可以将车辆组成较小。车辆植入可以实现多种目的,例如增加道路容量,通过减少空气动力阻力和抑制冲击波来节省能源。在本文中,我们开发了一个控制框架,用于在无车道交通中对车辆羊群进行建模。拟议的控制算法考虑了两种类型的代理:代表潜在羊群的代理和代表具有集体目标的虚拟领导者的G代理(例如,在未来的交通拥堵情况下放慢速度)。我们的算法基于用于羊群居中和避免碰撞的能量功能,用于速度匹配的共识算法以及虚拟领导者发挥的导航反馈。虚拟领导者的路径应在上层控制器中定义。此外,还实施了用于动态道路边界控制的反馈算法。我们以非常有希望的结果模拟了所提出的方法。我们表明,车辆群在几秒钟内有效地形成,速度已成功排列,并且车辆安排在不同的情况下保持稳定。此外,外侧和纵向羊群的扩展随着不同的能量功能和不断变化的道路边界而变化,车辆羊群遵循虚拟领导者的轨迹。最重要的是,在扰动的情况下,车辆群保持稳定,由于车辆横向位置的略有变化,诱导的冲击会有效抑制。
时间纪律的非PLL主动同步,用于网格形成逆变器
[1] P. Denholm,T。Mai,B。Kroposki,R。Kenyon和M. O'Malley,Wartia和Power Grid:无旋转的指南。编号NREL/TP-6A20-73856,国家可再生能源实验室,戈尔登,2020年5月。[2] J. Wang,A。Pratt和M. Baggu,“用于平滑微电网过渡的网格形成逆变器的综合同步控制”,2019年IEEE Power and Energy Society股东大会(IEEE PES PES GM),pp。1-5,2019年8月。[3] J. Wang,B。Lundstrom和A. Bernstein,“非PLL网格形成逆变器的设计,用于平滑的微电网过渡操作”,2020年IEEE Power and Energy Society Greally Mection(IEEE PES PES GM),2020年8月。[4] M. S. Golsorkhi,M。Savaghebi,D.D.Lu,J.M。Guerrero和J. C. Vasquez,“基于GPS的控制框架,用于准确的电流共享和微电网中的电源质量改进”,《电力电子产品IEEE交易》,第1卷。32,pp。5675–5687,2017年7月。[5]“ IEEE的互连和互连和互操作资源与相关电力系统接口的互操作性标准”,IEEE STD。1547-2018,4月2018。[6]“ IEEE设计,操作和集成与电力系统的设计,操作和集成指南”,IEEE STD。1547.4-2011,2011年7月。

Huwo:建立物理互动世界...
强化学习已被证明对人形机器人的运动有效,但是在复杂环境中实现稳定的运动仍然具有挑战性。humanoid机器人必须在导航并不断适应与环境的相互作用时保持平衡。对这些机器人环境动力学的深入了解对于实现稳定的运动至关重要。由于有特权信息,即机器人无法直接访问,以扩展可用的空间,因此先前基于强化的学习方法是从部分观察结果中重建环境信息,或者从部分观察中重建机器人染色信息,但它们从完全捕获的机器人环境相互作用的动力学中却缺乏。在这项工作中,我们提出了一个基于HU Manoid Robots(HUWO)的物理互动模型的端到端增强学习控制框架。我们的主要创新是引入物理互动世界模型,以了解机器人与环境之间的动态影响。另外,为了解决这些相互作用的时间和动态性质,我们采用了变压器-XL的隐藏层进行隐式建模。所提出的框架可以在复杂的环境(例如斜坡,楼梯和不连续的表面)中展示强大而灵活的运动能力。,我们使用Zerith 1机器人(在模拟和现实世界部署中)验证了该方法的鲁棒性,并将我们的Huwo与基线与基线进行了定量比较,并具有更好的穿越性和命令跟踪。
最佳非线性控制在整个大脑中的应用......
我们应用最优非线性控制框架来控制 FitzHugh-Nagumo 振荡器的全脑网络的动态。其节点对应于基于图谱的人类大脑皮层分割的皮质区域,节点间耦合强度来自人类大脑连接组的扩散张量成像数据。节点采用无延迟的加法方案耦合,并由具有固定均值和加性高斯噪声的背景输入驱动。节点的最佳控制输入是通过最小化成本函数来确定的,该成本函数惩罚与期望网络动态的偏差、控制能量和空间非稀疏控制输入。使用背景输入的强度和整体耦合强度作为序参数,网络的状态空间分解为由高振幅极限环分隔的低活动和高活动固定点区域,所有这些区域都定性地对应于孤立网络节点的状态。然而,沿着边界,可以观察到额外的极限环、异步状态和多稳态。将最优控制应用于几个状态切换和网络同步任务,并将结果与同一连接组的线性控制理论的可控性度量进行比较。我们发现,后者关于节点在控制网络动态方面的作用的直觉(仅基于连接组特征)通常不会延续到非线性系统中,正如之前所暗示的那样。相反,在最优非线性控制下,节点的作用关键取决于指定的任务和系统在状态空间中的位置。我们的研究结果为大脑网络状态的可控性提供了新的见解,并可能为设计新的非侵入性脑刺激范式提供灵感。

MIT开放访问文章学习模型预测...
摘要:模型预测控制(MPC)中的调整参数提出了重大挑战,尤其是当控制器的预测与闭环工厂的实际行为之间存在明显差异时。这种不匹配可能源于诸如实质性模型植物差异,不涵盖整个关注时间的预测范围有限或无法预见的系统干扰等因素。这种不匹配会危害性能和安全性,包括限制满意度。传统方法通过修改有限的地平线成本函数来解决此问题,以更好地反映总体运营成本,从数据中学习预测模型的部分或实施强大的MPC策略,这些策略可能是计算密集型或过于谨慎的。作为替代方案,已经提出了直接优化或学习控制器参数以增强闭环性能。我们将贝叶斯优化应用于有效学习未知模型参数和参数化约束词语项,旨在提高电池快速充电的闭环性能。这种方法建立了一个层次控制框架,其中贝叶斯优化直接对全球和长期目标进行微调闭环行为,而MPC则处理较低级别的短期控制任务。对于锂离子电池快速充电,我们表明学习方法不仅可以确保安全操作,而且还可以最大程度地提高闭环性能。这包括将电池的操作保持在其最大端子电压下方,并减少充电时间,所有这些都使用标准的标称MPC模型以短层和显着的初始模型植物不匹配而实现。