XiaoMi-AI文件搜索系统
World File Search System控制的

评估数字仪器和控制的安全性...
图 1. 每个控制器都包含一个受控过程的模型 2. 安全控制结构示例 3. 图 2 中操作过程的安全控制结构示例 4. 列车门控制器的简单安全控制回路 5. 不安全控制行为的结构 6. 导致危险的因果因素分类 7. 压水反应堆 8. 高级 PWR 安全控制结构 9. MSIV 的安全控制结构 10. 导致操作员不安全控制行为的因果因素 11. 导致操作员控制行为不被遵循的因果因素 12. 导致 DAS 不安全控制行为的因果因素 13. 导致 DAS 控制行为不被遵循的因果因素 14. 导致 PS 不安全控制行为的因果因素 15. 导致 PS 控制行为不被遵循的因果因素 表格 1. 事故和危险示例2. 简单列车门控制器的不安全控制动作 3. 所提供类型的示例上下文表 4. 未提供类型的示例上下文表 5. 系统级事故 6. 系统级危险 7. 关闭 MSIV 的不安全控制动作 8. 操作员提供关闭 MSIV 控制动作的上下文表 9. 未提供关闭 MSIV 的上下文表 10. 安全约束

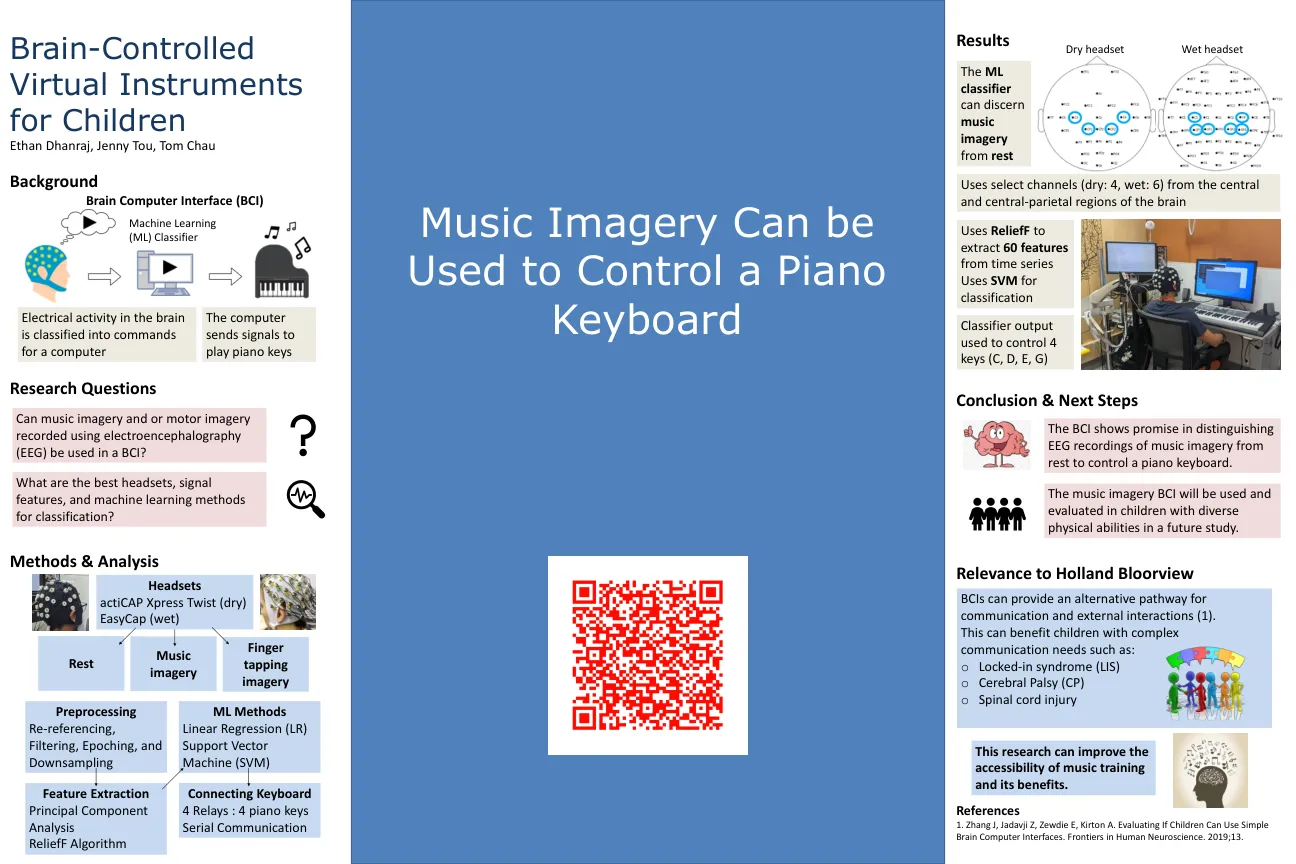
脑电波控制的机器人汽车
随着世界的进步,每个人都希望进步,因为工程领域的自动化正在增加,可以通过自动化起作用的激光操作来理解它,因此提高了成功率。用于大脑映射,我们使用一种技术脑电图(EEG/EMG),该技术可用于大脑中产生的电脉冲,通过提取这些神经,我们可以跟踪心灵状态,例如注意力,冥想。脑电图(EEG/EMG)为我们提供了不同的频率,可以进一步解码为心理状态,具有写作和特定癫痫的倾向。对于残疾人,它可用于控制汽车,也可以用于用于通过轮子移动的任何操作的任何操作。可以通过语音识别或某种传感器进行控制的产品。在他们领先一步之前,我们正在使用大脑来控制程序。

有意义的人类控制的原因
本文由两个部分组成。在第一部分中,我解决了困扰MHC当前操作的歧义。设计条件之一说,该系统应跟踪相关代理的原因。这种情况在涉及的原因之间是模棱两可的。在一种解释中,它说系统应该跟踪动机原因,而它涉及另一个系统的原因。辩论中的当前参与者将该框架解释为与(附近)激励原因有关的框架。我通过表明有意义的人类控制要求系统跟踪规范原因而反对这种解释。此外,我坚持认为,未能跟踪正确原因的有意义的人类控制的操作在道德上是有问题的。

交易能量控制的专利技术
随着可再生能源资源的显着增长,发电变得越来越间歇性和分布。此外,数百万个智能传感器和仪表正在将传统的单向电力输送系统转换为双向,信息包装的电网。交易能量和控制将经济学与动力工程结合在一起。本质上,当需求太多并且根据消费者的偏好和生活方式选择的供应不足时,一个愿意为能源支付的能力的个人或实体是多少?这些因素通过与能源市场通信以代表消费者做出决策的智能设备共同起作用 - 是否在电力使用峰值或延迟能源使用以减少支付并减轻电网上的压力的时间时支付更高的能源成本。

通过大脑接口控制的机械臂
由于受试者 1 得分为 100%,因此他被选中来测试机械臂运动学。使用 3 个不同的物体进行测试,两个直径不同的泡沫球和一个 20 毫米高的塑料圆柱体。下表 3、4 和 5 中的结果与手臂将物体移动到所需点的成功率有关。可以观察到,对于该项目,直径较小的泡沫球的成功率更高,约为 93%。在一些案例中观察到的一个问题是机械臂无法安全地携带或握住物体,导致物体在运输过程中掉落或滚动。对于圆柱体来说,这种情况发生的频率较低,因为它具有直底座。直径最大的球会在放置后从握把中滑落并滚出放置地点。

反对控制的遗传算法优化...
1. 引言 在现代交通系统中,减阻对于减少能源消耗和污染物排放至关重要。正如 Cheng 等人 [3] 所述,交通运输部门占能源预算的 25%,却排放了全球 10% 以上的温室气体。表面摩擦是造成阻力的一个重要因素,对于商用飞机来说,其总阻力中高达 55% 是由表面摩擦引起的。在过去的几年中,人们提出了各种技术来通过实验和数值方法减少表面摩擦阻力(例如 [5]、[10] 和 [14])。大多数减阻策略都侧重于壁面附近的相干结构,例如准流向涡旋 (QSV) 和速度条纹,这些结构与表面摩擦阻力密切相关。诸如喷出和扫掠等众所周知的事件都与 QSV 密切相关 [13]。最近的研究表明,可以使用相对简单的方案来控制近壁面湍流事件,从而减少表面摩擦。Choi 等人 [4] 对湍流通道流中的主动控制进行了直接数值模拟。他们发现,通过施加吹气和吸气来抵消壁面法向速度,可实现高达 25% 的壁面摩擦减少。此外,他们观察到当检测平面靠近壁面(y + ≈ 10 )时,阻力会减小,而当检测平面距离壁面较远时,阻力会显著增加。Rebbeck 和 Choi [12] 对实时对抗控制进行了风洞实验。他们研究了当使用壁面法向射流对单个扫掠事件施加对抗控制时,边界层的近壁面湍流结构如何变化。他们的结果表明,扬声器执行器产生的壁面法向射流可以有效阻挡扫掠事件期间高速流体的向壁运动。这表明,对壁面湍流进行反向控制可以减少湍流边界层的表层摩擦阻力。最近,Yu 等人 [15] 开发了一种人工智能开环控制系统,用于操纵平板上的湍流边界层,以减少摩擦阻力。边界层的特征是基于动量厚度的雷诺数 Reθ ,等于 1450。该系统由合成射流、壁线传感器和用于无监督学习最优控制律的遗传算法组成。每个合成射流(从矩形流向狭缝中喷出)的速度、频率和驱动相位都可以独立控制。通过使用
军事规范控制的自主系统...
图1:强调跨域互操作性的 JADC2 概念;来源:《联合全域指挥与控制 (JADC2) 战略摘要》(美国国防部,2022 年 3 月),https://media.defense.gov/2022/Mar/17/2002958406/-1/-1/1/SUMMARY-OF-THE- JOINT-ALL-DOMAIN-COMMAND-AND-CONTROL-STRATEGY.PDF。

智能手机游戏控制的比较研究
数字技术改变了人类的行为,尤其是产品的特性及其与界面和交互相关的功能。智能手机用户不得不接受触摸屏界面,但没有足够的证据表明这些数字界面比物理模拟界面更有效。此外,智能手机游戏行业推出了带有触摸界面的手机游戏,这些游戏对游戏用户来说可能有效,也可能无效。本研究旨在通过两项可用性测试,为智能手机游戏控制的模拟和数字界面之间的有效性寻找实证证据:(a)一项初步研究,比较六名参与者的直接和间接输入控制之间的数据值;(b)一项主要研究,从初步研究的结果中调查数字和模拟输入控制之间仅点击提供的影响。定性和定量研究方法都用于分析可用性测试。共有 81 名参与者参加了主要研究,并分为两大组,比较单手和双手输入控制。每组九名参与者玩基于不同输入控制任务的智能手机游戏。本研究发现,直接触摸屏交互对于双手输入控制任务更有效,而间接物理输入控制对于单手输入控制任务更有效。
使用基于用户控制的眼睛眨眼
Quito,厄瓜多尔摘要 - 由联合国等不同组织出版的数据表明,有很多人患有不同类型的运动障碍。在许多情况下,残疾是如此严重,以至于无法进行任何形式的运动。面对这种情况,大脑计算机界面技术已经面临着开发解决方案的挑战,这些解决方案允许为这些人提供更好的生活,最重要的领域之一就是移动性解决方案,其中包括大脑计算机接口使电动轮椅作为最有用的解决方案之一。面对这种情况,目前的工作开发了一种大脑计算机接口解决方案,该解决方案允许用户使用眨眼时产生的脑电波来控制轮椅的运动。为了创建本解决方案,增量原型方法已用于通过生成独立的模块来优化开发过程。该解决方案由几个组件,即EEG系统(OpenBCI),主控制器,轮椅控制器和轮椅,允许模块化以简单的方式进行其功能的更新(改进)。开发的系统表明它需要较低的培训时间,并且具有现实世界中适用的响应时间。实验结果表明,用户可以在一段时间内使用可接受的错误等级执行不同的任务,这可以被认为是系统可接受的。考虑到原型是为残疾人创建的,该系统可以授予他们一定程度的独立性。