XiaoMi-AI文件搜索系统
World File Search System摄像机
UN38.3 Test Report 样品名称: 摄像机锂电池组
Test cells shall be secured to the testing machine by means of a rigid mount which will support all mounting surfaces of each test cell.Each cell or battery shall be subjected to a half-sine shock of peak acceleration of 150 gn and pulse duration of 6 milliseconds.Alternatively, large cells may be subjected to a half-sine shock of peak acceleration of 50 gn and pulse duration of 11 milliseconds.Each cell shall be subjected to three shocks in the positive direction followed by three shocks in the negative direction of three mutually perpendicular mounting positions of the cell or battery for a total of 18 shocks./ 以稳固的托架固定住每个样品。对每个电芯 样品以峰值为 150gn 的半正弦的加速度撞击,脉冲持 续 6ms ,另外,大电芯须经受最大加速度 50gn 和脉 冲持续时间 11ms 的半正弦波冲击,每个样品必须在 三个互相垂直的电池安装方位的正方向经受三次冲 击,接着在反方向经受三次冲击,总共经受 18 次冲 击。

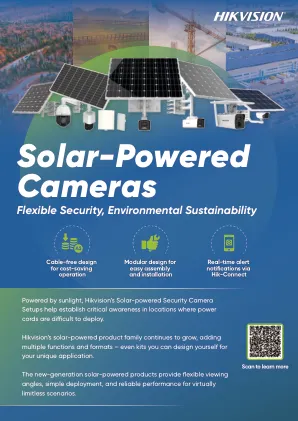
防爆炸摄像机和防腐蚀摄像机
Hikvision提供了一个强大的Hikcentral软件平台,用于管理所有Hikvision产品,包括防爆相机。使用直观的仪表板,用户可以远程监视正在进行的站点操作,实时检查设备健康,接收紧急警报等等。实现无缝管理和快速响应,Hikcentral在整个操作中都可以增强安全性。

关于使用随身摄像机或动作摄像机的指导......
近几年来,随身摄像机和类似设备的使用规模和种类都在增长。它们有许多潜在的应用,包括娱乐、安全和新闻等等。根据《通用数据保护条例》(GDPR),以非纯粹个人身份收集或处理个人的个人数据的个人或组织是“控制者”,负有一定的责任。下文还将讨论将此类摄像技术用于纯粹个人娱乐目的的情况;然而,在专业环境中,随身摄像机的操作员必须尊重 GDPR 赋予他们的义务,特别是按照第 5 条中的数据保护原则开展活动。