XiaoMi-AI文件搜索系统
World File Search System操作任务

Quest2Ros:一个促进远程运输机器人的应用
Teleperation在多个机器人技术应用中至关重要。提到一些,它可用于在危险环境中远程操作机器人[1,2],以执行通缉轨迹的演示,以引导不同的学习方法,例如daggers [3]或扩散策略[4]。成功的远程操作系统应该主要是i)直觉,ii)机器人不可知论,iii)成本效益。应控制其笛卡尔坐标,即末端效应器的位置和方向。但是,在笛卡尔空间中直观地运行正在努力。一种常见且具有成本效益的解决方案是使用适用于在3D空间中工作的计算机鼠标,如[5]中所示。尽管有经验的用户可以通过这样的设置执行令人印象深刻的远程操作任务[4],但用户无法直接模仿

框架 - 构建设备 - 界面 - 特征...
全国教育进步评估(NAEP)的持续高度优先级是将绩效结果从1年与另一个人进行比较的能力。探索新的测试方法和问题类型的探索已经出现了对维持NAEP趋势的最新挑战,这些方法反映了技术在教育中日益增长的使用。NAEP在评估中介绍了各种新问题和任务类型,包括撰写计算机任务,交互式计算机任务,混合动手操作任务以及基于方案的技术和工程学素养(TEL)和阅读评估。为了保持从纸张基于纸质评估的趋势,NAEP利用了涉及桥梁研究的多步骤,在管理模式之间建立纽带,并逐步引入使用数字技术的更具创新性的问题或任务。

F-35,用奥丁取代阿里斯后会发生什么
什么是 ALIS 。虽然 Alis(自主物流信息系统)经常被描述为 F-35 内部的计算机大脑,但它是一个更大的系统,包括飞机上的物理组件以及将它们连接在一起的基于网络的后端云。正如我们在 Ares 的一篇深入文章中读到的那样,“首先要澄清的是 Alis 是一个由不同子系统组成的复杂系统,这些子系统一旦成熟,就会相互接口,以保证最大程度地发挥作用。舰队的运作。”制造商洛克希德·马丁公司过去将其描述为“智能手机”,负责管理“超过 65 个应用程序,涵盖从运营管理和培训到维护和供应链的所有事务”。长期以来,该系统一直被誉为帮助简化维护和其他操作任务,预计将使人员能够更轻松地发现有问题的维护趋势,并在部队之间快速交换重要的任务数据。

成功浏览电动汽车充电软件市场
明确的客户重点是另一个核心成功因素。不同的用例有不同的客户,每个客户都有不同的功能请求和集成挑战(例如,酒店的需求与超市连锁店不同)。同时,一些大型CPO决定(部分)(部分)将其后端开发提供支持,以支持专门的国际扩张,并最大程度地减少动态市场中的数据和其他依赖性。随着市场的成熟和选定的CPMS提供商开始提供出色的解决方案(例如,预测性维护),我们希望大型CPO将其CPM重新出售到第三方软件提供商,并专注于其核心操作任务。这为CPMS提供商提供了赢得利润丰厚的客户并提高保留率未来的机会。同样,仓库和其他车队运营商的授权可以提供额外的上涨潜力。
F-35,用奥丁取代阿里斯后会发生什么
什么是 ALIS?虽然 Alis(自主物流信息系统)通常被描述为 F-35 内部计算机的大脑,但它是一个更大的系统,包括飞机上的物理组件以及将它们全部连接在一起的基于云的网络后端。正如阿瑞斯的深入分析所言,“首先要澄清的是,阿里是一个由各种子系统组成的复杂系统,这些子系统一旦成熟,就会相互接口,以保证舰队的最大可操作性”。制造商洛克希德马丁公司此前曾将其描述为一款“智能手机”,负责运行“超过 65 个应用程序,可完成从运营管理和培训到维护和供应链的所有工作”。该系统长期以来一直被视为简化维护和其他操作任务的辅助手段,预计它将使人员能够更轻松地识别有问题的维护趋势,并在单位之间快速交换重要的任务数据。
成像雷达 - NASA 事实 - cloudfront.net
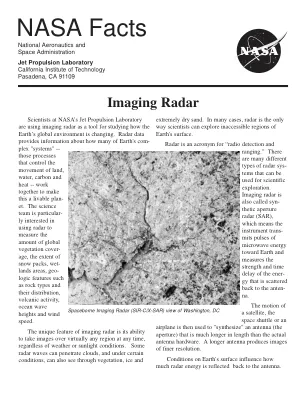
未来任务 SIR-C/X-SAR 第二次飞行在获取重复飞行干涉数据和从这些数据生成高程图方面取得了巨大成功,这促使人们计划进行第三次飞行。美国国家图像和测绘局 (NIMA) 提供资金对 SIR-C 进行改造,增加一个 60 米 (197 英尺) 的吊杆和一个外置天线,操作任务并处理数据,而 NASA 将提供所需的大部分额外资源。这项为期 11 天的任务被称为航天飞机雷达地形测绘仪 (SRTM),它将生成 80% 地球陆地表面的高程图。这次飞行目前列在 2000 年 5 月的航天飞机清单上,但航天飞机时间表的调整可能使 SRTM 飞行更早,或许早在 1999 年春季。

Gen AI如何改变保险流程
生成的AI通过创建提高决策质量,生产力和效率的摘要报告来改善知识工作者决策和索赔来改变保险业。它通过通过自然语言处理来分析客户数据来支持泛型个性化,以改善参与度,推动收入,客户满意度和减少的流失。此外,它通过处理非结构化内容来完善风险选择并索赔损失估算来推进数据科学和分析。生成的AI还简化了诸如费率归档和产品批准之类的操作任务,并具有生成合成数据的能力。它通过内容摘要进一步增强了文档处理,以更好地理解并汇总为客户的政策,并为营销策略提供竞争情报。最后,它通过增强聊天机器人和对话性AI来增强自助服务,从而实现更个性化和有效的客户互动。

电动飞机的电池单元格缩放定律
核热推进(NTP)对支持NASA的目标的目标一直保持兴趣,以生产人类评级的航天器进行火星勘探。NASA/DARPA DRACO努力旨在通过2027年的飞行来展示第一枚核热火箭。本文考虑了随后的空间演示的选项,并由更广泛的飞行前测试活动支持。概述了一个实现目标的操作概念,并定义了选择航天器概念的优点。提供了各种核热推进示范车辆的概念设计,跨越了广泛的贸易空间。每个概念都以不同的方式平衡了性能能力和对操作任务的可扩展性与时间表,风险,地面成本和飞行演示。提供了著名概念的关键属性,其中这些概念证明了每个概念可以完成所考虑的目标的程度。

tidybot ++:机器人学习的开源自动移动操纵器
摘要:利用最近在模仿学习中进行操作的前进的承诺将需要收集大量的人类引导示范。本文提出了一种开源设计,用于廉价,健壮且灵活的移动操纵器,该设计可以支持任意武器,从而实现了各种各样的现实世界家庭移动操纵任务。至关重要的是,我们的设计使用动力施法者使移动基础能够完全自动,能够同时独立地控制所有平面自由度。此功能使基础更具机动性,并简化了许多移动操作任务,从而消除了在非实体基础中产生复杂且耗时的动作的运动限制。我们为机器人配备了直观的手机遥控接口,以实现简单的数据获取以进行模仿学习。在我们的实验中,我们使用此界面来收集数据,并表明所产生的学习政策可以成功执行各种常见的家庭移动操纵任务。

equibot:SIM(3) - 可推广和数据有效学习的Equivariant扩散策略
摘要:构建有效的模仿学习方法,使机器人能够从有限的数据中学习,并且仍然在不同的现实世界环境中概括是一个长期存在的问题。我们提出了Equibot,一种可用于机器人操纵任务学习的强大,有效且可推广的方法。我们的方法结合了SIM(3) - 等级神经网络体系结构与扩散模型。这确保了我们所学的政策对规模,轮换和翻译的变化是不变的,从而增强了它们对看不见的环境的适用性,同时保留了基于扩散的政策学习的好处,例如多种方式和鲁棒性。我们在一组6项模拟任务上显示,我们提出的方法减少了数据要求并改善对新方案的概括。在现实世界中,有10个移动操作任务的10个变体,我们表明我们的方法可以轻松地概括为每项任务中仅5分钟的人类演示的新颖对象和场景。网站:https://equi-bot.github.io/