XiaoMi-AI文件搜索系统
World File Search System操作命令
DNA 分子量标准简介凝胶电泳操作注意事项
A -1 DNA 降解 —— 避免核酸酶污染。 电泳缓冲液陈旧 —— 电泳缓冲液多次使用后,离子强度降低, pH 值上升,缓冲能力减弱,从而影响电泳效 果。建议经常更换电泳缓冲液。 所用电泳条件不合适 ——电泳时电压不应超过 10 V/cm ,温度小 于 30 ℃,核查所用电泳缓冲液是否有足够的 缓冲能力和凝胶浓度是否正确。 DNA 上样量过多 ——减少凝胶中 DNA 上样量,建议电泳样 品根据孔的宽度加样。 DNA 样含盐过高 ——电泳前通过乙醇沉淀去除过多的盐。 有蛋白污染 ——电泳前酚抽提去除蛋白。 琼脂糖质量 ——选用高质量的琼脂糖 (TIANGEN 公司 ) 。
面向线状柔性物体的机器人操作研究进展与展望
此类任务同样可以先离线学习状态转移预测模 型再使用 MPC 计算控制输入 [28-29] ,或直接使用强 化学习方法 [68-69] ,但需要大量训练数据且泛化性较 差。在准静态的局部形变控制中,更常用的方法是 在线估计局部线性模型。该模型假设线状柔性体形 状变化速度与机器人末端运动速度在局部由一个雅 可比矩阵 JJJ 线性地联系起来,即 ˙ xxx ( t ) = JJJ ( t ) ˙ rrr ( t ) ,其 中 ˙ xxx 为柔性体形变速度, ˙ rrr 为机器人末端运动速度。 由于使用高频率的闭环反馈来补偿模型误差,因此 完成任务不需要非常精确的雅可比矩阵。 Berenson 等 [70-71] 提出了刚度衰减( diminishing rigidity )的概 念,即离抓取点越远的位置与抓取点之间呈现越弱 的刚性关系,并据此给出了雅可比矩阵的近似数学 表示。此外,常用的方法是根据实时操作数据在线 估计雅可比矩阵,即基于少量实际操作中实时收集 的局部运动数据 ˙ xxx 和 ˙ rrr ,使用 Broyden 更新规则 [72] 、 梯度下降法 [73] 、(加权)最小二乘法 [33-34,74] 或卡尔 曼滤波 [75] 等方法在线地对雅可比矩阵进行估计。 该模型的线性形式给在线估计提供了便利。然而, 雅可比矩阵的值与柔性体形状相关,因此在操作 过程中具有时变性,这使得在线更新结果具有滞 后性,即利用过往数据更新雅可比矩阵后,柔性体 已经移动至新的形状,而新形状对应的雅可比矩阵 与过往数据可能并不一致。同时,完整估计雅可比 矩阵的全部元素需要机器人在所有自由度上的运 动数据,这在实际操作过程中难以实现,为此一些 工作提出根据数据的奇异值进行选择性更新或加 权更新 [74] 。此外,此类方法需要雅可比矩阵的初 值,一般在操作前控制机器人沿所有自由度依次运 动,收集数据估计初始位置的雅可比矩阵。受上述 问题影响,在线估计方法往往仅适用于局部小形变 的定点控制,难以用于长距离大形变的轨迹跟踪。 Yu 等 [31] 提出 ˙ xxx = JJJ ( xxx , rrr ) ˙ rrr 的模型形式,其中 JJJ ( · ) 为 当前状态至雅可比矩阵的非线性映射,待估计参数 为时不变形式。基于该模型,该方法将离线学习与 在线更新无缝结合,实现了稳定、平滑的大变形控 制。 Yang 等 [76-77] 使用模态分析方法建立柔性体模

生命现象の光操作技术の创出
1)F。Kawano,H。Suzuki,A。Furuya,M。Sato:Nat。社区。,6,6256(2015)。2)Y. Nihongaki,F。Kawano,T。Nakajima,M。Sato:Nat。生物技术。,33,755(2015)。3)Y. Nihongaki,T。Otabe,Y。Ueda,M。Sato:Nat。化学。生物。,15,882(2019)。4)方法,14,963(2017)。5)Y. Nihongaki,S。Yamamoto,F。Kawano,H。Suzuki,M。Sato:Chem生物。,22,169(2015)。6)生物技术。,40,1672(2022)。7)F。Kawano,R。Okazaki,M。Yazawa,M。Sato:Nat。化学。生物。,12,1059(2016)。8)natl。学院。SCI。 U.S.A.,116,11587(2019)。 9)K。Morikawa,K。Furuhashi,C。DeSena-Tomas,A。L。Garcia-Garcia,R。Bekdash,A。D。Klein,N。Gallerani,H。E。E. Yamamoto,S.-H。 E. Park,G。S。Collins,F。Kawano,M。Sato,C.-S。 Lin,K。L. Targoff,E。Au,M。Salling,M。Yazawa:Nat。 社区。 ,11,2141(2020)。SCI。U.S.A.,116,11587(2019)。 9)K。Morikawa,K。Furuhashi,C。DeSena-Tomas,A。L。Garcia-Garcia,R。Bekdash,A。D。Klein,N。Gallerani,H。E。E. Yamamoto,S.-H。 E. Park,G。S。Collins,F。Kawano,M。Sato,C.-S。 Lin,K。L. Targoff,E。Au,M。Salling,M。Yazawa:Nat。 社区。 ,11,2141(2020)。U.S.A.,116,11587(2019)。9)K。Morikawa,K。Furuhashi,C。DeSena-Tomas,A。L。Garcia-Garcia,R。Bekdash,A。D。Klein,N。Gallerani,H。E。E. Yamamoto,S.-H。 E. Park,G。S。Collins,F。Kawano,M。Sato,C.-S。 Lin,K。L. Targoff,E。Au,M。Salling,M。Yazawa:Nat。社区。,11,2141(2020)。

命令
基于相当于国家试验的积极结果,我命令:——1.同意向俄罗斯联邦武装部队供应一套“Ulej 1M”门禁控制装置,其用途、组成和主要技术特征符合本命令的附录。 2. 分配给访问控制装置“Ulej 1M”集:实际全名 - “访问控制装置“Ulej 1M”集”;缩写名称-“控制套件“Ulej 1M”;品牌(指数) - Hive 1M。控制套件“Ulej 1M”设定的代码符合俄罗斯联邦国防部武器、军事、特种装备和军事技术财产分类标准 - G2 64 1515 P。控制套件“Ulej 1M”的联邦命名编号为〜6350571652407。3.指定控制套件“Ulej 1M”用于装备海军第1和第2级编队、军事单位和舰艇(以下简称军事单位)。

利用人工智能(AI)的大坝运行支持系统
事实证明,浅层神经网络可以高精度地预测以前经历过的洪水模式下的大坝流量。另一方面,正如御所水坝的情况一样,当洪水史无前例时,准确度就会很低。基于AI的大坝运营支持系统通过让AI学习经验丰富的大坝管理者进行的理想大坝运营及其决策标准,即时显示建议的大坝排放量。通过实施该系统,可以最大限度地利用大坝的蓄水能力,同时有助于减少对下游河流的破坏并做出有关高级运营的决策。 希望该系统将来能够用于更高效、更有效的大坝运行。
MDH 命令 - 修订的养老院事务命令
我,丹尼斯·R·施拉德,卫生部长,认为为预防和控制 2019 年新型冠状病毒及其引起的疾病(“SARS-CoV-2” 或“2019-NCoV” 或“COVID-19”),并为保护马里兰州患者、工作人员和其他个人的健康和安全,有必要,特此授权并命令采取以下行动,预防和控制这种危害本州公共健康的传染性疾病的蔓延。本修订指令和命令取代并取代 2020 年 6 月 27 日、2022 年 1 月 13 日、2021 年 9 月 8 日、2021 年 8 月 18 日、2021 年 6 月 15 日、2021 年 5 月 4 日、2021 年 2 月 11 日、2021 年 12 月 8 日、2021 年 11 月 17 日、2021 年 10 月 27 日、2021 年 10 月 1 日、2021 年 7 月 24 日、2021 年 6 月 19 日、2021 年 4 月 29 日、2021 年 4 月 24 日、2021 年 4 月 9 日和 2021 年 4 月 5 日关于养老院事务的指令和命令。1. 保护养老院居民:

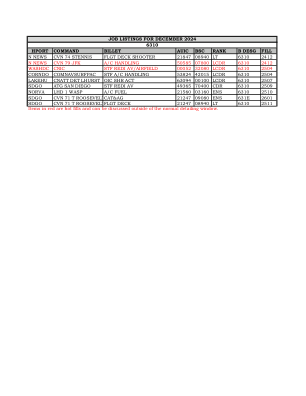
hport 命令
HPORT COMMAND BILLET AUIC BSC Rank B DESG FILL N NEWS CVN 74 STENNIS FLGT DECK SHOOTER 21847 08940 LT 6310 2412 N NEWS CVN 79 JFK A/C HANDLING 50585 07800 LCDR 6310 2412 WASHDC CNIC STF REDI AV/机场 00052 32080 LCDR 6310 2504 CORNDO COMNAVSURFPAC STF 空调处理 53824 42015 LCDR 6310 2504 LAKEHU CNATT DET LHURST OIC SHR ACT 63094 00100 LCDR 6310 2507 SDGO ATG 圣地亚哥 STF 雷迪 AV 49365 70400 CDR 6310 2509 NORVA LHD 1 WASP A/C 燃料 21560 03160 ENS 6310 2510 SDGO CVN 71 T ROOSEVELTCAT&AG 21247 09080 ENS 631E 2601 SDGO CVN 71 T ROOSEVELTFLGT 甲板 21247 08940 LT 6310 2511 红色项目为热填充,可以在正常详细说明窗口之外进行讨论。