XiaoMi-AI文件搜索系统
World File Search System操纵
脊柱操纵对运动单位行为的影响
目前的丹麦政府的目标是将丹麦Co 2排放降低到2030年的1990年水平的70%,并于2050年进入气候中立国家。对于能源部门,2050年的目标意味着丹麦能源系统应在2050年独立于化石燃料,这意味着在丹麦,可再生能源生产必须能够涵盖丹麦的能源需求。由于长期的视野和与技术开发相关的不确定性,没有针对2050年能量系统的外观创建具体计划。然而,基于不同参与者创造能源系统情景的丹麦传统,以对如何发生这种能源系统的过渡进行民主讨论,近年来,几位丹麦演员使用能够实现政治目标的能源系统创造了不同的未来能源场景。在给定时间使用可用知识创建了每种情况,并且根据其知识和需求,不同的参与者对能量系统的不同部分不同。不同参与者的能源系统场景的例子是丹麦能源机构2013年的“ 2020年,2035年和2050年的能源场景” [1],丹麦工程师协会(IDA)“ 2015年IDA的能源愿景2050” [2],以及Enverginet的“ System Perspective 2035” 2018年[3]。

用EEG信号自动操纵机器人臂
摘要 - 该项目具有客观地识别使用传感器“情感EEG Neuroset”的一些面部表情。此设备是一种能够通过脑电图技术(EEG)接收和解释大脑生物电活动的传感器,此外,还具有16个通道,并连续准确接受脑电波。此外,传感器具有易于使用的SDK,即使没有任何大脑信号获取经验,任何人即使没有任何经验。Emotiv®数据被转移到MATLAB®进行过滤脑电波,以通过串行通信向Arduino发送信息。因此,在Arduino板上获得了三种不同表达式的识别,即眨眼,眨眼和微笑,每个表达式在Arduino板上都有不同的LED颜色。

从大规模数据集中学习的机器人操纵
摘要:从大型多任务演示数据集中学习的模仿学习已成为构建普通能力的机器人的有前途的途径。结果,已经花费了1000个小时来在全球构建如此大规模的数据集上。尽管这种努力不断增长,但我们仍然缺乏对应收集哪些数据来改善机器人数据集的效用的系统性理解,并促进了下游政策学习。在这项工作中,我们进行了一项大规模的数据集组成研究,以回答这个问题。我们开发了一个数据生成框架,以在实际数据集(例如传感器放置,对象类型和安排)中模拟普通多样性,并使用它来生成具有控制组成的大规模机器人数据集,从而实现了在现实世界中会昂贵的数据集组成研究。我们专注于两个实际设置:(1)当未来的研究人员收集大规模的机器人数据集时,应强调哪种类型的多样性,以及(2)当前的从业人员如何从现有数据集中检索相关的演示以最大程度地提高关注任务的下游政策绩效。我们的研究产生了几个关键见解 - 例如,我们发现相机的姿势和空间排列是收集多样性和检索对齐方式的关键维度。在现实世界的机器人学习设置中,我们发现,不仅可以从模拟中进行洞察力,而且我们对现有数据集(例如Droid)的检索策略使我们能够始终如一地超过现有的培训策略高达70%。https://mimiclabs-iclr.github.io/

AG2Manip:用代理学习新颖的操纵技巧 -
摘要 - 能够学习新型操纵任务的自主机器人系统有望将行业从制造业转变为服务自动化。然而,当前方法(例如,VIP和R3M)仍然面临重大障碍,尤其是机器人实施例之间的域间隙以及在特定动作空间内成功执行成功的任务执行的稀疏性,从而导致了错误和模棱两可的任务。我们介绍了AG2Manip(操纵的代理 - 不合稳定代表),该框架旨在通过两个关键的创新来解决这些挑战:(1)源自人类操纵视频的代理人视觉表示,并具有实施方案的细节,以增强普遍性; (2)代表机器人的运动学代表到通用代理代理,强调了终端效果和对象之间的关键相互作用。ag2manip在模拟基准中进行了经验验证,显示出325%的性能提高而不依赖于域特异性演示。消融研究进一步强调了代理 - 不合稳定的视觉和作用表示对这一成功的基本贡献。将我们的评估扩展到现实世界,AG2Manip很明显地将模仿学习成功率从50%提高到77.5%,这表明了其在模拟和真实环境中的有效性和可推广性。
Ghostshot:用电磁干扰操纵CCD摄像机的图像
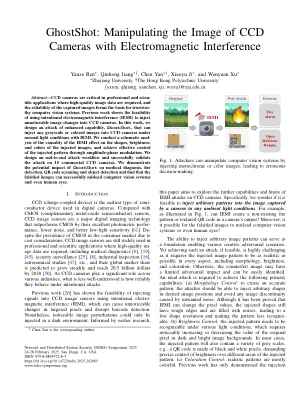
摘要 - CCCD摄像机在需要高质量图像数据的专业和专业应用中至关重要,并且捕获的图像的可靠性构成了信托计算机视觉系统的基础。先前的工作显示了使用故意电磁干扰(IEMI)将不明显的图像变化为CCD摄像机的可行性。在这项工作中,我们设计了增强功能,Ghostshot的攻击,可以在正常的光条件下使用IEMI注入任何灰度或彩色图像。我们对IEMI效应对注射图像的形状,亮度和颜色的因果关系进行了示意性分析,并通过振幅相位调制实现了对注射模式的有效控制。我们设计了端到端攻击工作流程,并成功验证了对15个商用CCD摄像机的攻击。我们证明了Ghostshot对医学诊断,火灾检测,QR码扫描和对象检测的潜在影响,并发现伪造的图像可以成功地误导计算机视觉系统,甚至是人眼。


Defiranger:检测Defi价格操纵攻击
摘要 - 分散融资(DEFI)的快速增长增强了区块链生态系统。同时,对DEFI应用程序(APP)的攻击正在增加。但是,据我们所知,现有的智能合同漏洞检测工具无法直接检测DEFI攻击。那是因为他们缺乏恢复和理解高级偏移语义的能力,例如,用户在分散的交换(DEX)中交易了令牌对x和y。在这项工作中,我们专注于检测两种新型的价格操纵攻击。为此,我们提出了一种平台独立的方法来识别高级偏差语义。指的是,我们首先从原始事务中构造了现金流树(CFT),然后将低级语义提升到高级语义,包括五个高级偏差动作。最后,我们使用用恢复的Defi语义表达的模式来检测价格操纵攻击。我们实施了一个原型,称为D E F I R Angr,该原型驱散了14起零日安全事件。这些发现是第一次对受到影响的当事方或/和社区的影响。此外,回测实验发现了15起未知的历史安全事件。我们进一步进行了攻击分析,以阐明产生价格操纵攻击的脆弱性根本原因。
通过操纵敏感性基因的工程番茄抗病性
各种病原体严重威胁到番茄的产量和质量。理解植物病原体相互作用的进步揭示了抗药性(R)和易感性(S)基因在确定植物免疫中的复杂作用。虽然R基因具有靶向的病原体耐药性,但它们通常容易受到病原体的进化。相反,S基因为通过靶向基因编辑发展广谱和耐用的阻力提供了有希望的途径。基于CRISPR/CAS的技术的最新突破已经彻底改变了对植物基因组的操纵,从而实现了S基因的精确修饰,以增强番茄疾病的耐药性,而不会损害生长或质量。然而,由于复杂的植物病原体相互作用和当前的技术局限性,该技术的全部潜力的利用是具有挑战性的。本评论强调了使用基因编辑工具剖析和设计番茄基因以提高免疫力的关键进展。我们讨论了S基因如何影响病原体的进入,免疫抑制和营养获取,以及其目标编辑如何赋予细菌,真菌和病毒病原体的抗性。此外,我们解决了与生长防御权衡取舍相关的挑战,并提出了诸如荷尔蒙途径调制和精确的监管编辑之类的策略,以克服这些限制。这篇综述强调了基于CRISPR的方法来改变番茄育种的潜力,为在全球粮食安全挑战升级的情况下,为可持续生产抗病品种铺平了道路。

用光拓扑来操纵散射光谱...
6 Light and Matter 8 9 Hooman Barati Sedeh 1 , Danilo G. Pires 1 , Nitish Chandra 1 , Jiannan Gao 1 , Dmitrii Tsvetkov, 1 Pavel 10 Terekhov 1 , Ivan Kravchenko 2 , Natalia Litchinitser 1, * 11 12 1 Department of Electrical and Computer Engineering, Duke University, 27708 Durham, NC,美国。13 2纳米相材料科学中心,橡树岭国家实验室,37831 Oak Ridge,美国田纳西州。15 * Corresponding author: natalia.litchinitser@duke.edu 16 17 Keywords: mie resonances, structured light, multipole decomposition, high-index nanoparticle 18 19 Abstract 20 21 Structured lights, including beams carrying spin and orbital angular momenta, radially and 22 23 azimuthally polarized vector beams, as well as spatio-temporal optical vortices, have 24 attracted significant由于其独特的振幅,相位前,极化和25 26的时间结构引起的兴趣,从而在光学和量子中实现了各种应用27 28通信,微观渗透和超分辨率成像。在平行的结构化29个光学材料,超材料和元面孔中,由工程单元组成 - 31个元原子,开辟了新的途径,用于操纵光的流动和光学感测。32 33虽然几项研究探索了对单个元原子的结构化光作用,但它们的34个形状在很大程度上仅限于简单的球形几何形状。但是,
脊柱操纵对运动单位行为的影响
<3 1 labarjum ovogic自动irlantrics lucien.robinault@uphf.fr(l.r. div>); jimmy.lauber@uphf.fr(J.L。) div>2电气工程与商业科学学院,马里波尔大学马里博尔大学,斯洛文尼亚Maribor; ALES.HOBARBBAR@UMSI中心学习Celeau et socgition,Universe,Untorse,Unoulouse,UPS,UPS,31052 Toulouse,法国; sylvain.crmerox@cnrs.fr 4大脑和认知研究中心,粉丝诱因,奥克兰奥克兰市Auto Unaalland,奥克兰0627;新的Zeighition; USMAN.SHSSID@ACE.AC.NZ 6 Auckland Newank Collegeic Chirpractic Research中心,奥克兰1060;新西兰; kelly.holt@nzchiroro.co.nz(K.H. div>); heidi.haavik@nzchirro.co.nz(H.H.) div>7卫生科学技术系,奥尔堡大学,9220 AALBORG,DEARSPORTH:IRRANSPRIZIZI.CEZ;电话。 div>: + 64-9-526-6789;传真: + 64-9-526-6788 div>