XiaoMi-AI文件搜索系统
World File Search System操纵的

pokerrt:戳戳作为平面非划痕操纵的技巧和失败恢复策略
摘要 - 在这项工作中,我们介绍了Pokerrt,这是一种新颖的运动计划算法,该算法证明了戳记是一种有效的非纹章操纵技巧,以实现快速操纵对象并增加机器人可及工作空间的大小。,我们将戳戳作为一种失败恢复策略,在挑选和地位最初失败或无法实现的情况下,与拾取和位置协同使用。我们的实验证明了拟议框架在计划对象进行调查中使用戳戳操纵在整洁和混乱的环境中的效率。除了定量和定性地证明了Pokerrt对模拟和现实世界中不同方案的适应性外,我们的结果还表明,在成功率和任务时间方面,戳戳而不是推动和抓住的优势。

迈向日常任务中灵活机器人操纵的知识工程方法
摘要在过去的十年中,家用机器人技术取得了巨大进步,使机器人能够自主完成家庭任务。这些机器人通常用于特定任务和/或对象。我们假设可以通过基于知识的方法来克服实现新的临时任务请求方面缺乏灵活性,从而允许机器人推断如何解决新任务或在新对象上执行已知任务。朝向这个目标,我们提出了一种基于知识的方法,该方法利用网络上已经存在的知识来构建一个本体学支持机器人在推理参数的推理中,这些参数会影响操纵动作,以执行一系列对象的任务变化1。本体论包括对象和动作信息,涵盖了处置和负担以及特定于任务的属性。作为概念验证,我们通过从相关本体论中导入和链接知识来手动构建食物切割本体,此外还可以从非结构化的网络来源提取和语义增强知识。我们演示了机器人如何查询本体,并将包含的信息转化为动作参数。我们通过模拟访问本体的机器人来评估创建的本体论的可行性,以执行切割任务变化的操作参数化。

Cyberdemo:增强现实世界灵巧操纵的模拟人类示范
我们介绍了Cyberdemo,这是一种用于机器人模仿学习的新方法,该方法利用了模拟人类的策略来实现现实世界的任务。通过在模拟环境中纳入广泛的数据增强,CyberDemo在转移到现实世界中的传统现实世界中的表现优于传统的现实世界中的演示,从而处理了多样化的物理和视觉条件。无论其负担能力和在数据收集中的便利性如何,Cyberdemo Opper-pers-pers-pers-pers of-lip-term-term of基线方法在跨不同任务的成功率方面,并具有以前未见的对象的普遍性。例如,尽管只有人类的示范插入三瓣,但它仍可以旋转新型的四阀和五角谷。我们的研究证明了模拟人类示范对现实世界灵活操纵任务的重要潜力。更多详细信息可以在https://cyber-demo.github.io/

马尔可夫决策过程的安全加固学习对手臂操纵的安全性学习
摘要:在人类与肉体共存的世界中,确保安全互动至关重要。传统的基于逻辑的方法通常缺乏机器人所需的直觉,尤其是在这些方法无法解释所有可能场景的复杂环境中。强化学习在机器人技术中表现出了希望,因为它的适应性优于传统逻辑。但是,增强学习的探索性质会危害安全性。本文解决了动态环境中机器人手臂操纵器计划轨迹的挑战。此外,本文强调了容易奖励黑客的多种奖励作品的陷阱。提出了一种具有简化奖励和约束配方的新方法。这使机器人臂能够避免从未重置的非机构障碍,从而增强操作安全性。提出的方法将标量的预期回报与Markov决策过程结合在一起,通过Lagrange乘法器,从而提高了性能。标量组件使用指示器成本函数值,直接从重播缓冲区采样,作为附加的缩放系数。这种方法在条件不断变化的动态环境中特别有效,而不是仅依靠Lagrange乘数扩展的预期成本。

直接自我识别通过粒子滤波来进行灵巧操纵的逆雅可比亚人
摘要 - 计划和控制机器人手机操纵的能力受到了几个问题的挑战,包括系统的先验知识以及随着不同机器人手甚至掌握实例而变化的复杂物理学。最直接的手动操纵模型之一是逆雅各布,它可以直接从所需的内对象运动映射到所需的手动执行器控制。但是,获得没有复杂手动系统模型的没有复杂手动系统模型的这种反向雅各布人通常是impeasible。我们提出了一种使用基于粒子滤波器的估计方案自我识别的逆雅各布人来控制手工操作的方法,该方案利用了非隔离的手在自我识别运动过程中维持被动稳定的掌握的能力。此方法不需要对特定手动系统的先验知识,并且可以通过小型探索动作来学习系统的逆雅各布。我们的系统紧密近似近似雅各布,可用于成功执行一系列对象的操纵任务。通过在耶鲁大学模型上进行广泛的实验,我们表明所提出的系统可以提供准确的亚毫米级精度操纵,并且基于雅各布的逆控制器可以支持高达900Hz的实时操纵控制。
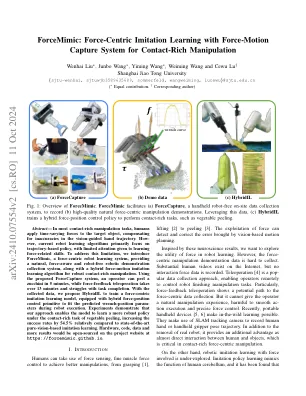
强制性:以力量捕获系统进行富含接触的操纵的力量仿真学习
摘要 - 在大多数接触式操纵任务中,人类将随时间变化的力应用于目标对象,以补偿视觉引导的手轨迹中的不准确性。,当前的机器人学习算法主要集中在基于轨迹的政策上,而对学习力相关的技能的关注有限。为了解决这一局限性,我们引入了以力为中心的机器人学习系统Forcemimic,提供了一种自然,吸引力和无机器人的机器人示范收集系统,以及用于强大接触富含接触良好的操作的混合力 - 动作模仿学习算法。使用拟议的forcapture系统,操作员可以在5分钟内剥离西葫芦,而力量反馈近距离运行则需要13分钟以上,并且在任务完成方面挣扎。使用收集的数据,我们提议Hybridil训练一个以力为中心的模仿学习模型,该模型配备了混合力位置控制原始的原始性,以适合机器人执行过程中预测的扳手位置参数。实验表明,我们的方法使该模型能够在蔬菜剥离的接触术任务下学习更强大的策略,与基于纯粹的纯粹的模仿学习相比,成功率相对增加了54.5%。硬件,代码,数据和更多结果将在项目网站https://forcemimic.github.io上开放。

描述人工智能系统的操控行为
操纵是社交媒体、广告和聊天机器人等许多领域关注的问题。随着人工智能系统越来越多地介入我们的数字互动,了解人工智能系统在多大程度上可能在系统设计者不知情的情况下操纵人类变得非常重要。我们的工作阐明了定义和衡量人工智能系统操纵的挑战。首先,我们以先前关于操纵的文献为基础,描述了可能的操纵概念空间,我们发现这些概念取决于动机、意图、隐蔽性和伤害等概念。我们回顾了如何操作每个概念的提案,并概述了将每个概念纳入操纵定义所面临的挑战。其次,我们讨论了操纵与相关概念(如欺骗和胁迫)之间的联系。然后,我们分析了我们对操纵的描述如何应用于推荐系统和语言模型,并简要概述了其他领域的操纵监管。虽然在定义和衡量人工智能系统的操纵方面取得了一些进展,但仍存在许多差距。由于缺乏统一的定义和可靠的测量工具,我们不能排除人工智能系统在系统设计者不知情的情况下学会操纵人类的可能性。操纵可能对人类自主性构成重大威胁,因此有必要采取预防措施来减轻这种威胁。