XiaoMi-AI文件搜索系统
World File Search System放置
生成01.07.2025§159-C。与放置在大池塘中的导航辅助工具有关的责任| 1
2。有限责任。湖协会已获得前保护局或农业,保护和林业部将导航援助标记放置在大池塘中的许可证,只要湖水协会已将标记或维持标记符合条件和条件的标记造成的导航援助标记所引起的人身伤害,财产损害或死亡,对人身伤害,财产损害或死亡不承担任何责任。[PL 2013,c。 405,pt。d,§12(amd)。]
利用增强现实技术教授人脑基础知识和脑电图电极放置
本文展示了如何使用增强现实 (AR) 来教授人脑的基本知识并指导正确的 EEG 电极放置。所提出的应用主要包括两个部分:(1) 所提出的基于标记的 AR 系统使用 Vuforia 技术确定头部尺寸以创建虚拟大脑和虚拟 EEG 电极;(2) 用户交互和实施。我们使用幻影头进行了两项实验,以验证标记的大小和工作空间区域,并使用地面真实数据验证虚拟电极的位置。结果表明,所提出的方法可用于在推荐范围内进行电极放置指导。我们的目标是让初学者使用所提出的系统。我们将进一步用人头测试该系统,以评估可用性并确定应用程序改进的关键领域。

赛普拉斯:带有GPU加速度的VLSI启发的PCB放置
印刷电路板(PCB)设计的规模已大大提高,现代商业设计具有10,000多个组件。但是,放置过程大大依赖了需要数周完成的手动努力,强调了对自动PCB放置方法的需求。PCB放置的挑战来自其灵活的设计空间和有限的路由资源。现有的自动PCB放置工具在质量和可扩展性方面取得了有限的成功。相比之下,非常大规模的集成(VLSI)放置方法已被证明是可扩展的,对于具有数百万个细胞并提供高质量结果的设计是可扩展的。因此,我们提出了柏树,这是一种受VLSI启发的可扩展的,加速的PCB放置方法。它结合了适合PCB布局的量身定制的成本功能,约束处理和优化的技术。此外,对现实和开源基准的需求不断增长,以(1)在工具和(2)建立Performance基准之间进行有意义的比较以跟踪PCB放置技术的进度。为了解决这一差距,我们提出了一个从实际商业设计中合成的PCB基准套件。我们使用基准套件来评估针对最先进的商业和学术PCB放置工具的方法。我们的方法在提出的基准测试标准上证明了1-5.9倍的可路由。对于完全路由的设计,赛普拉斯达到了1-19.7×较短的路由轨道长度。随着GPU加速度,柏树在运行时间内最多可提供492.3倍的加速。最后,我们展示了对真实商业设计的可扩展性,这是现有工具无与伦比的功能。
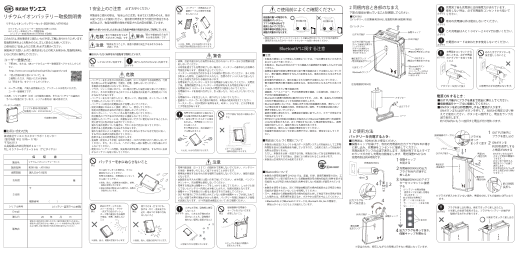

AI-6821/AI-6821HD 二维扫描仪用户手册
警告: 电池若未妥善处理, 可能会导致爆炸。 请勿拆卸电池, 或用火销毁电池。 请将电池放置于儿童拿不到的地方。 请使用专用充电器充电, 并请依照当地政府或法律规定妥善处理废弃电池。 CAUTION: EXPLOSION HAZARD Do not disassemble, short circuit, heat the battery or dispose of in fire. Store battery pack in a proper place. Do not expose to temperature above 60℃/140℉. Use specified charger only. Please dispose of the used batteries following the rules or laws issued by the local government.

春季:通过基于深的增强学习的状态放置来改善碎片区块链的吞吐量
sharding提供了一个机会来克服区块链的固有量表挑战,这是下一代Web的基础架构。在碎片链中,该州被分为较小的群体,称为“碎片”。由于状态被放置在不同的碎片上,因此不可避免地会跨碎片交易,这不利于碎片区块链的性能。现有的解决方案通过基于图形分配的方法基于启发式算法或重新分配状态的状态,这些方法的效率较低或昂贵。在本文中,我们介绍了春天,这是第一个基于状态放置的基于深层的学习(DRL)碎片框架。春季将国家安置作为马尔可夫决策过程,该过程考虑了交叉交易比率和工作量平衡,并雇用DRL来学习有效的国家安置政策。基于实际以太坊交易数据的实验结果证明了与其他状态放置解决方案相比,春季的超级性。特别是,它使跨分散交易比率降低了26.63%,并将吞吐量提高到36.03%,而所有这些都没有不适当地牺牲碎片之间的工作量余额。更新培训模型和做出决策的时间分别仅为0.1和0.002,这表明开销是可以接受的。

云、雾和边缘数据中心的容器放置和迁移策略:一项调查
过去十年见证了网络软件化的重要发展,它彻底改变了网络实践。虚拟化网络对分散在网络中的容器化网络功能的控制和编排提出了新颖而具体的要求。在这方面,虚拟化网络功能的迁移起着关键作用,可以最好地满足最佳资源利用率、负载平衡和容错的要求。本综述旨在详细概述容器迁移的进展,以便更好地理解与迁移相关的优势与实际挑战之间的权衡。本文对将容器化网络功能映射到虚拟化基础设施上的放置算法进行了分类。接下来,提出了执行容器化微服务传输的迁移技术的分类。

RAP-G:使用遗传算法进行深度边缘计算的可靠性感知服务放置
摘要 - 为了确保较低的延迟,服务提供商越来越多地转向边缘计算,将服务和资源从云到网络的边缘,尽可能靠近用户。但是,由于视频和图像处理应用程序在计算上特别密集,因此它们的部署通常基于边缘和云之间的分布式配置,这在依靠不可靠的网络时可能会增加故障的风险。在这项工作中,我们提出了算法RAP-G(具有遗传学的可靠性意识服务放置),该算法使用遗传算法(GA)考虑了网络链接的可靠性并在云和边缘之间分发服务。我们还开发了一种称为RF2(可靠性意识的第一拟合)的第一拟合算法的新变体,该算法在合理的时间内考虑可靠性。评估了RAP-G算法的性能,并将其与RF2算法进行比较。实验结果表明,考虑在服务提供的可靠性和RAP-G的优势方面的重要性。索引术语 - 边缘计算,人工智能,超可靠的低潜伏期通信,服务编排

使用面向网格的遗传算法降低和灵活性提高的可再生能源生成器的最佳放置
摘要:可再生能源生成器(REG)单位的最佳计划有助于满足未来的电力需求,并提高灵活性。因此,本文提出了一种基于遗传算法(GA)的混合组合(GA)和使用分析功率流方程的溶液,以最佳的量和放置电力系统网络中的REG单元的位置。GOGA的目标是系统损失最小化和灵活性改善。使用KRON方程,目标函数表示系统损失是不同发电机生成的功率的函数。基于电压偏差和系统损耗,提出了一种灵活性指数(FI)来评估灵活性的改善。在测试系统的各种总线上放置REG之后,将执行功率流量运行,并计算系统损耗,这被认为是染色体纯度值。GOGA通过更改REG单元的位置来搜索拟合度函数的最低值。交叉,突变和替换算子来生成新的染色体,直到根据REG的大小和位置获得最佳解决方案为止。在印度的Rajasthan Rajya Vidyut Prasaran Nigam Ltd.(RVPN)的Rajasthan Rajya Vidyut Prasaran Nigam Ltd.(RVPN)的一部分的一部分进行了一项研究。使用线性拟合模型计算了10年时间范围的载荷预测。进行了成本 - 固定分析,并确定拟议的GOGA提供了一种可行的可行解决方案,具有提高的灵活性。确定GOGA可确保高收敛速度和良好的解决方案准确性。此外,与常规GA相比,GOGA的性能优越。

使用上下文信息和多传感器数据进行室内定位的最佳地标放置
摘要 — 移动代理室内定位的最有效解决方案通常依赖于多传感器数据融合。具体而言,可以通过结合航位推算技术(例如基于里程计)和相对于给定参考系内具有已知位置和/或方向的合适地标的距离和姿态测量,实现准确性、可扩展性和可用性方面的良好权衡。此类技术的一个关键问题是地标部署,它不仅应考虑所采用传感器的有限检测范围,还应考虑错过地标的非零概率,即使它实际上位于传感器检测区域 (SDA) 内。本文重点研究最小地标放置,同时考虑可能的环境上下文信息。该解决方案依赖于贪婪放置算法,该算法可以最佳地解决问题,同时将定位不确定性保持在给定限制以下。通过在欧盟项目 ACANTO 背景下的多次模拟验证了所提出方法的正确性,该项目需要在大型、公共且可能拥挤的环境中(例如购物中心或机场)定位一个或多个智能机器人步行者。