XiaoMi-AI文件搜索系统
World File Search System救援的

无人机救援的自主空中监视...
摘要:这种基于无人机的监视系统通过引入主动监测和实时数据传播,提出了针对洪水管理挑战的开创性解决方案。配备了高分辨率摄像头和GPS功能,专门无人机不断监视受洪水影响的地区,为救援团队提供有关精确洪水水平和遇险个人确切的GPS位置的重要信息。这项创新使救援团队有能力做出明智的数据驱动决定,并根据情况的严重性优化回答。该解决方案通过其动态适应性来区分自己。在高液场的情况下,该系统建议部署船只进行疏散,而在低液体情况下,采用了替代性救援方法。根据实时人口数据,动态调整救援团队成员数量的能力最小化了响应时间,从而降低了洪水受害者和救援队的伤亡风险。这种全面而主动的方法改变了传统的反应性模型,增强了整体灾难管理的效力,并努力减少洪水紧急情况下的死亡。
平时和战时海上救援的义务
船舶损失。1 此外,死亡和受伤与海上所有人有关,无论是海员、乘客、移民还是其他人。即使是现代远洋船舶也难免发生事故,正如 Costa Concordia 号邮轮事故中 32 人死亡所表明的那样。2 更危险的是质量不合格的船只,它们通常挂着方便旗,被鲁莽的船主用来最大化商业利益。3 这些船只如果被用来偷运移民,就会变得特别危险,地中海发生的许多事件就证明了这一点。每天都有移民死于地中海。4 在一个广为人知的例子中,一艘载有 72 人的小型充气橡皮艇在地中海搁浅了 15 天,然后被冲到利比亚岸上。在那几天里,一架军用直升机、一艘大型军舰和其他各种船只靠近了这艘橡皮艇,但没有一艘去营救船上的人。 5 由于缺乏援助,小艇上最初有六十多人,只有十人幸存。

生活质量倡议:在可持续发展目标救援的核心...
可持续发展目标远离2030年截止日期的中途,许多国家都落后于全球承诺。慢慢的进步加剧了19日的大流行,冲突,粮食和能源价格上涨以及与气候相关的灾难。已经记录了一些成功,例如减少极端贫困和儿童死亡率,性别平等的改善和获得电力。但是,许多其他人偏离了轨道,甚至倒退了。只有140个具有数据的可持续发展目标目标中只有12%;接近一半的中度或严重偏离了轨道,大约30%的人没有在2015年基线以下的移动或回归。Cities拥有实现可持续发展目标的关键,该HLPF的主题正在加速Covid-19的复苏,并在所有层面上全面实施2030年可持续发展议程。联合国秘书长呼吁为可持续发展目标制定救援计划,很明显,任何此类计划都需要将城市和城镇放在前面。今天,世界一半以上的人口居住在城市,到2050年,每10人中有7人将居住在城市地区。作为全球大多数人口的主机,城市对可持续发展目标的实现有重大影响,而将近三分之二的可持续发展目标目标具有城市组成部分。

无人机群搜索救援的用户界面设计
搜索和救援 (SAR) 行动是指一组训练有素的专业人员在特定区域搜寻并帮助失踪人员的任务。目前在丹麦,SAR 行动由丹麦国防部下属的政府机构丹麦紧急事务管理局 (DEMA) 1 负责。在传统的 SAR 行动中,紧急救援人员被派出去搜寻失踪人员,然而,近代 SAR 行动涉及使用无人机。救援队加入无人机后,他们能够更快地在区域搜寻,并降低因派遣无人机到高危区域搜寻而危及紧急救援人员的风险。这篇硕士论文名为《搜索和救援中的无人机群用户界面设计》,我们在其中探讨了如何设计无人机群的用户界面以及控制无人机群的各种方法。我们开发了一个 Web 应用程序形式的原型,无人机操作员可以同时控制多架无人机。增加了对控制实体无人机的支持,这增加了研究参与者使用原型时的真实感。它为无人机操作员提供了使用三种方法控制无人机的能力:
用于车辆救援的电池供电扩张救援工具
NUSTL 负责管理应急响应人员系统评估和验证 (SAVER) 计划,该计划提供有关市售设备的信息,以协助响应组织进行设备选择和采购。SAVER 知识产品提供有关 DHS 授权设备清单 (AEL) 所列类别的设备的信息,主要关注响应者社区的两个主要问题:“有哪些设备可用?”和“设备性能如何?”SAVER 计划与响应者合作,对市售应急响应设备进行客观、与实践者相关、以操作为导向的评估和验证。拥有合适的工具可以为响应者提供更安全的工作环境,并为他们服务的人提供更安全的社区。
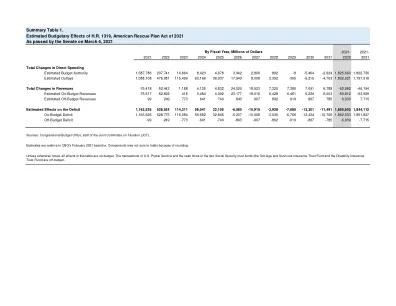
HR 1319,美国救援的估计预算影响...
Estimated Effects on the Deficit 1,163,526 528,524 114,311 59,041 32,105 -6,080 -10,915 -3,928 -7,685 -13,301 -11,491 1,855,603 1,844,112 On-Budget Deficit 1,163,625 528,773 115,084 59,682 32,845 -5,237 -10,008 -3,036 -6,766 -12,434 -10,706 1,862,533 1,851,827 Off-Budget Deficit -99 -249 -773 -641 -740 -843 -907 -892 -919 -867 -785 -6,930 -7,715

Mariam Ali Issa
Amrouch H,Genssler P,Imani M,Issa M,Jiao X,Mohammed W,Sepanta G,Wang R,“超越冯·诺伊曼时代:脑启发脑启发到救援的高维度计算”,亚洲和南太平洋设计自动化会议(ASP-DAC),2023.

如何引用本文:Sun B, Pang W, Chen M, Zhu D. Development and Experimental Verify of Search and Rescue ROV. Intell Robot 2022;2(4):355-70. http://dx.doi.org/10.20517/ir.2022.23。
本文提出了一种新型搜救遥控机器人(ROV)系统的设计,目标是实现水下目标搜索探测和小目标抓捕及救援的作业要求。首先给出了整个水下系统总体设计和推进系统布局设计。在此基础上对ROV框架结构、电子舱、动力舱进行了设计与分析。为完成抓取任务,基于多功能机械手设计了抓取手,实现水下抓取。为使ROV更加智能化,采用并分析了不同类型的水下物体检测与跟踪方法。最后,在水池和海上进行了试验,验证了所设计的搜救ROV的可靠性和稳定性。

药物诱导的抗性进化需要较少的侵略性治疗
对抗癌,抗菌和抗病毒疗法的耐药性的演变在癌症和病原体细胞种群中广泛存在。经典理论严格认为,在不断发展的种群中,遗传和表型变异是独立于选择压力而产生的。然而,抗菌剂,传统的细胞毒性化学疗法和靶向癌症疗法的最新实验发现表明,治疗不仅可以选择选择,而且会通过改变突变过程影响适应率。在这里,我们分析了一个模型,该模型诱导了突变率的增加,并探索了其对治疗优化的后果。我们认为,治疗的真正生物学成本不仅限于有害的副作用,而是通过从根本上改变微环境中基本的生态进化动态来更深刻地实现。对控制的成本(或附带损害)的考虑是成功治疗设计的核心,并且可以统一基于进化的治疗优化方法。使用进化救援的概念,我们将处理作为最佳控制问题,并解决了最佳消除策略,从而最大程度地降低了进化救援的可能性。我们的解决方案利用了一个权衡,其中增加药物浓度具有两个相反的影响。一方面,它通过更快地减少目标细胞群的大小来减少从头突变;另一方面,较高的剂量会产生剩余的治疗诱导的突变。我们表明,旨在尽快消除并代表当前护理标准的积极消除策略,即使在药物诱导的增加(折叠变化≤10)到基线突变率的情况下,也可能有害。我们的发现强调了剂量依赖性在抵抗进化中的重要性,并激发了对诱变性和其他隐藏的疗程的促进抗药性的进一步研究。
