XiaoMi-AI文件搜索系统
World File Search System数值方法


锂离子电池数值方法的比较分析...
电化学模型可以洞悉电池的内部状态,成为电池设计和管理的有力工具。这些模型由数值求解的偏微分方程 (PDE) 组成。在本文中,我们比较了两种常用于数值求解锂离子电池控制 PDE 的空间离散化方法,即有限差分法 (FDM) 和有限体积法 (FVM),它们的模型精度和质量守恒保证。首先,我们提供对 FDM 和 FVM 进行空间离散化的数学细节,以求解电池单粒子模型 (SPM)。从实验数据中识别 SPM 参数,并进行灵敏度分析以研究不同电流输入配置文件下的参数识别能力,然后对两种数值方案进行模型精度和质量守恒分析。利用三阶 Hermite 外推方法,本文提出了一种增强型 FVM 方案,以提高依赖线性外推的标准 FVM 的模型精度。本文表明,采用 Hermite 外推的 FVM 方案可建立精确且稳健的控制型电池模型,同时保证质量守恒和高精度。© 2023 电化学学会(“ECS”)。由 IOP Publishing Limited 代表 ECS 出版。[DOI:10.1149/1945-7111/ ad1293]

使用数值方法和数据集机器学习
摘要。结构系统可能会由于动态激发和惯性而产生负矩。复合金属甲板平板通常设计用于承受正矩,并在底部得到加固,顶部的热增强最小。然而,在动态冲击负载下,上部的固定加固可能会导致这些平板在负矩下失败。因此,本研究调查了在自由下降重量冲击负载下复合金属甲板板的性能。该研究由两个主要部分组成:基于收集到的数据,通过NITE元素模拟分析和培训机器生成数据。LS-DYNA商业软件用于分析具有三个参数的165个模型:平板长度,前锋重量和前锋速度。在机器学习组件中,有限元建模(FEM)结果用于训练机器并准确预测这些板的性能。报告的结果是根据最大负矩,最大DE分解以及平板的弹性和塑性行为报告的。该研究表明,在高前锋速度下,标本在60至80 kN的范围内经历了最终的内部负矩。

复合材料影响的高级数值方法
弹丸Jagan Selvaraj,Luiz F. Kawashita,Mehdi Yasaee,Gordon Kalwak,Stephen R. Hallett的不一致,软体对复合材料的影响:分层实验和高级数字建模

凸多阶段随机优化的数值方法
在随机环境中涉及顺序决策的优化问题。在这本专着中,我们主要集中于SP和SOC建模方法。在这些框架中,存在自然情况,当被考虑的问题是凸。顺序优化的经典方法基于动态编程。它具有所谓的“维度诅咒”的问题,因为它的计算复杂性相对于状态变量的维度呈指数增长。解决凸多阶段随机问题的最新进展是基于切割动态编程方程的成本为go(值)函数的平面近似。在动态设置中切割平面类型算法是该专着的主要主题之一。我们还讨论了应用于多阶段随机优化问题的随机临界类型方法。从计算复杂性的角度来看,这两种方法似乎相互融合。切割平面类型方法可以处理大量阶段的多阶段问题
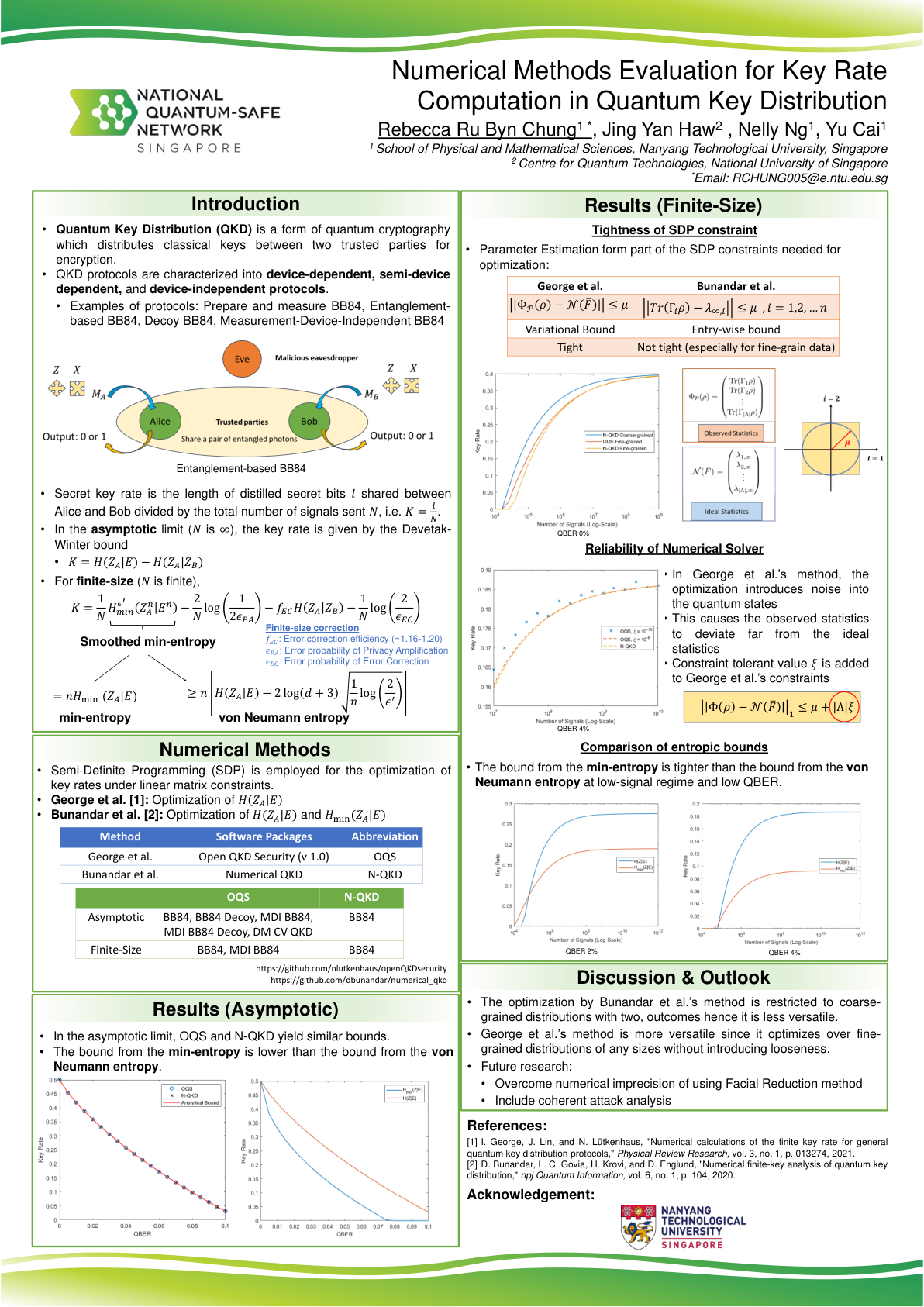
关键利率计算的数值方法评估...
[1] I. George、J. Lin 和 N. Lütkenhaus,“通用量子密钥分发协议的有限密钥速率的数值计算”,《物理评论研究》,第 3 卷,第 1 期,第 013274 页,2021 年。[2] D. Bunandar、LC Govia、H. Krovi 和 D. Englund,“量子密钥分发的数值有限密钥分析”,《量子信息》,第 6 卷,第 1 期,第 104 页,2020 年。
![[取消]基于结构的Bootstrap的基于增强学习的数值方法](/simg/6\68a92c1f6474a47f07b48968084dcd7e7db94a55.webp)
[取消]基于结构的Bootstrap的基于增强学习的数值方法
i将讨论用于在保形的引导程序中数值求解交叉方程的随机优化技术。通过使用增强学习算法来告知这种方法。我将为1D线缺失的CFT提供结果,但也突出显示其更广泛的适用性。

数值方法模块 14:等值插值...
此公式可以更好地估计 xn 附近点 x 处的 f 值,因为公式尽可能早地使用最接近该 x 的数据点,并且还利用了最多 n 阶后向(实际上是相除)差值。同样的推理表明,该公式可能不适合估计远离 xn 的点 x 处的 f 值,即靠近观测数据的中间或开始处。但是,正如下图和下一模块中介绍的数值实验所示,这种限制没有任何实际意义。例 1:设 f(x) = e 2x Cos 3x,其中 x Є [0, 1]。使用 5 次牛顿前向/后向差分插值多项式,在节点 x = 0、x = 0.2、x = 0.4、x = 0.6、x = 0.8 和 x = 1 上找到 f(0.1)、f(0.5) 和 f(0.9) 的近似值。给定 6 个节点和相应的函数值,计算表 2 中给出的前向/后向差分。然后根据牛顿前向/后向差分插值公式,计算 f(0.1)、f(0.5)、f(0.9) 的值并将其与实际值进行比较。

计算电子在半导体纳米结构中停留时间的数值方法
摘要 半导体器件的操作速度在一定程度上取决于电子通过半导体纳米结构的时间。然而,由于量子力学中对传输时间的定义存在争议,以及电子在半导体器件中遇到的有效势函数复杂,传输时间的计算十分困难。本文基于改进的传输矩阵法数值求解薛定谔方程,并利用HG Winful关系计算停留时间,开发了一种数值方法来评估电子在半导体器件中的传输时间。与精确可解析的矩形势垒情况相比,所建立的数值方法精度高,误差小,可用来研究半导体器件的动态响应和操作速度。所提出的数值方法成功地应用于电子在双矩形势垒中的停留时间的计算,并揭示了传输时间与势垒数量的依赖关系。

基于数值方法的动态补偿的航空操纵器机器人的多任务控制
本文提出了一种用于空中操纵器的控制方案,该方案允许解决不同的运动问题:最终效应器位置控制,最终效应器轨迹跟踪控制和路径遵循控制。该方案具有两个级联的控制器:i)第一个控制器是基于数值方法的最小范数控制器,它仅通过修改控制器引用就可以解决三个运动控制问题。另外,由于空中操纵器机器人是一个冗余系统,即,完成任务具有额外的自由度,可以按层次顺序设置其他控制目标。作为控制的次要目标,提议在任务过程中维持机器人臂的所需配置。ii)第二个级联控制器旨在补偿系统的动力学,其中主要目的是将速度误差驱动到零。提出了机器人系统的耦合动态模型(己谐和机器人臂)。该模型通常是根据力和扭矩的函数开发的。但是,在这项工作中,它是参考速度的函数,这些速度通常是这些车辆的参考。通过相应的稳定性和鲁棒性分析给出了提出的对照算法。最后,为了验证控制方案,在部分结构化的环境中进行实验测试,其空中操纵器与空中平台和3DOF机器人臂相符。